1.本发明属于高温超导全张量磁梯度探头领域,具体地而言为一种高温超导全张量磁梯度探头的非正交误差校正方法。
背景技术:
2.超导量子干涉器(squid)是一种基于超导约瑟夫森效应和磁通量子化原理的磁通传感器,当squid传感器中的约瑟夫森结流入一定的偏置电流时,约瑟夫森结两端的电压变化会呈现出一种宏观量子干涉现象,基于零磁通锁定原理的squid读出电路可以将squid传感器中的磁通变化转变为线性的电路输出电压变化,研究人员基于此将squid传感器应用到生物微弱磁信号探测、仪器无损探伤检测和矿产资源勘探的系统开发中。
3.为了获得磁场的梯度数据,研究人员最开始采用squid梯度计作为传感器敏感单元进行系统的搭建,但是squid梯度计中两个拾取环中间的基线距离由于加工工艺的限制,磁场梯度灵敏度的极值受限,所以为了增加基线距离,研究人员利用如图1所示的squid磁强计通过空间上的特殊布局构建成全张量磁梯度探头从而进行磁梯度场全张量9个分量中5个独立分量b
xx
、b
xz
、b
yx
、b
yz
、b
zz
的测量。但是该方案存在的问题是由于探头上支撑squid传感器的支架本身的加工精度的限制以及squid传感器在支架上的安装误差共同导致了三个轴向布置的squid磁强计传感器的敏感轴互相之间不垂直,同时同轴向布置的squid磁强计传感器的敏感轴互相之间不平行,这两个问题可以统称为高温超导全张量磁梯度测量系统中的探头非正交误差。因此,求出非正交误差参数并对磁梯度数据进行校正就显得尤为必要。
技术实现要素:
4.本发明所要解决的技术问题在于提供一种高温超导全张量磁梯度探头的非正交误差校正方法,解决在含有8个squid磁强计的高温超导全张量磁梯度测量系统中三个轴向布置的squid磁强计传感器的敏感轴互相之间不垂直,同时同轴向布置的squid磁强计传感器的敏感轴互相之间不平行的问题,对高温超导全张量磁梯度探头的非正交误差角度进行测量求解并对磁梯度数据进行校正。
5.本发明是这样实现的,
6.一种高温超导全张量磁梯度探头的非正交误差校正方法,该方法包括:
7.在含有8个squid磁强计的高温超导全张量磁梯度探头中,对高温超导全张量磁梯度探头坐标系三个轴向布置的squid磁强计传感器之间的非正交误差角度进行测量;
8.三轴亥姆霍兹线圈产生已知参数的磁场与squid传感器实际测量值对比,求得8个squid磁强计传感器的拾取环敏感轴方向的矢量转换到高温超导全张量磁梯度探头正交直角坐标系的三个坐标轴上所需要的角度参数,完成坐标转化;
9.采用转换后的温超导全张量磁梯度探头正交直角坐标系的三个坐标轴上所需要的角度参数,对磁梯度全张量的独立分量进行非正交误差的校正。
10.进一步地,具体包括:
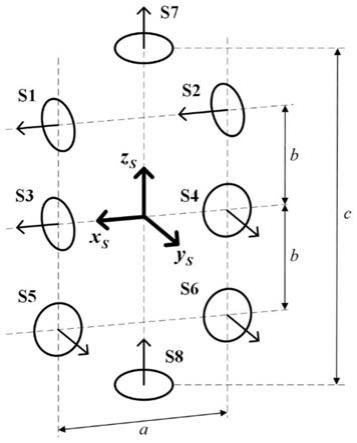
11.将含有8个squid磁强计传感器的高温超导全张量磁梯度探头安装在三轴亥姆霍兹线圈的中心位置,其中在高温超导全张量磁梯度探头坐标系o-x
syszs
下,s1号、s2号、s3号squid磁强计传感器的拾取环敏感轴法线方向与xs轴平行,s4号、s5号、s6号squid磁强计传感器的拾取环敏感轴法线方向与ys轴平行,s7号、s8号squid磁强计传感器的拾取环敏感轴法线方向在zs轴上;
12.利用电流源分别向三轴亥姆霍兹线圈三个轴通入正弦电流,求取8个squid传感器的拾取环敏感轴方向与三轴亥姆霍兹线圈三个轴之间的夹角;
13.建立三轴亥姆霍兹线圈的坐标系为o-xyz,在坐标系o-xyz中,8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈三个轴之间的夹角,得到8个squid传感器拾取环敏感轴的法向量坐标,求得s1号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角α
17
、s2号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角α
27
、s3号squid传感器与s7号squid传感器拾取环敏感轴之间的夹角α
37
、s4号squid与s7号squid传感器的拾取环敏感轴之间的夹角β
47
、s5号squid与s7号squid传感器拾取环敏感轴之间的夹角β
57
、s6号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角β
67
、s1号squid传感器与s4号squid传感器的拾取环敏感轴之间的夹角γ
14
、s1号squid传感器与s5号squid传感器拾取环敏感轴之间的夹角γ
15
、s1号squid传感器与s6号squid传感器拾取环敏感轴之间的夹角γ
16
、s2号squid传感器与s4号squid传感器拾取环敏感轴之间的夹角γ
24
、s3号squid传感器与s4号squid传感器拾取环敏感轴之间的夹角γ
34
;s7号squid传感器拾取环敏感轴z7轴与zs轴重合,xs轴在平面x1oz7内,其中x1为s7号squid传感器拾取环敏感轴;在高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
中,在x1轴和y4轴上分别取a点和b点,其中y4为第4个squid传感器拾取环敏感轴,使oa=ob,得出a、b两点的坐标为:
14.a(oa
·
sinα
17
,0,oa
·
cosα
17
),b(oa
·
sinβ
47
·
sinθ,oa
·
sinβ
47
·
cosθ,oa
·
cosβ
47
),
15.则a、b两点之间的距离为:
[0016][0017]
在三角形oab中根据余弦定理得:
[0018][0019]
联立两式得:
[0020]
2oa
2-2oa2·
sinα
17
·
sinβ
47
·
sinθ
14-2oa2·
cosα
17
·
cosβ
47
=oa2 ob
2-2
·
oa
·
ob
·
cosγ
14
[0021]
整理得:
[0022][0023]
其中θ
14
代表s4号squid传感器拾取环敏感轴y4轴在平面xsoys上的投影与ys轴之间的夹角;
[0024]
同理,在求取θ
14
过程中,将y4替换为y5和y6,其中y5代表s5号squid传感器拾取环敏感轴,y6代表s6号squid传感器拾取环敏感轴,求出s5号squid传感器拾取环敏感轴y5轴在平
面xsoys上的投影与ys轴之间的夹角θ
15
和s6号squid传感器拾取环敏感轴y6轴在平面xsoys上的投影与ys轴之间的夹角θ
16
:
[0025][0026]
在高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
中,x2为第2个squid传感器拾取环敏感轴,y4为s4号squid传感器拾取环敏感轴,在x2轴和y4轴上分别取c点和d点,使oc=od,得出c、d两点的坐标为:
[0027]
c(oc
·
sinα
27
·
cosθ
24
,oc
·
sinα
27
·
sinθ
24
,oc
·
cosα
27
)d(od
·
sinβ
47
·
sinθ
14
,od
·
sinβ
47
·
cosθ
14
,od
·
cosβ
47
)
[0028]
则c、d两点之间的距离为:
[0029][0030]
在三角形ocd中根据余弦定理联立上式可得:
[0031][0032]
又因为sin2θ
24
cos2θ
24
=1
[0033]
联立两式得:
[0034][0035]
其中其中θ
24
代表s2号squid传感器拾取环敏感轴x2轴在平面xsoys上的投影与xs轴之间的夹角;
[0036]
同理,在求取θ
24
过程中,将x2替换为x3,其中x3代表s3号squid传感器拾取环敏感轴,求出s3号squid传感器拾取环敏感轴x3轴在平面xsoys上的投影与xs轴之间的夹角θ
34
:
[0037][0038]
其中
[0039]
在高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
中,z7代表第7个squid传感器拾取环敏感轴,z8代表s8号squid传感器拾取环敏感轴,z7轴与z8轴之间的夹角
[0040][0041]
进一步地,对磁梯度全张量的独立分量进行非正交误差的校正包括:8个squid传感器输出分别为b1、b2、b3、b4、b5、b6、b7、b8,则经过非正交误差校正后的磁梯度全张量的5个独立分量为:
[0042]
[0043][0044][0045][0046][0047]
其中到分别指第1个到第8个squid传感器输出的零点偏移误差。
[0048]
进一步地,求取8个squid传感器的拾取环敏感轴方向与三轴亥姆霍兹线圈三个轴之间的夹角包括:
[0049]
利用电流源向三轴亥姆霍兹线圈的x轴通入正弦电流从而使三轴亥姆霍兹线圈的x轴在线圈中心的磁场均匀区内产生b
x
=a
x
sinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为代表传感器编号;
[0050]
分别建立8个目标函数,代表传感器编号,利用最小二乘法分别求出8个squid传感器输出的正弦信号的峰值和8个squid传感器的零点偏移误差
[0051]
通过和a
x
分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈x轴之间的夹角
[0052]
停止向x轴线圈中通入电流,利用电流源向三轴亥姆霍兹线圈的y轴通入正弦电流从而使三轴亥姆霍兹线圈的y轴在线圈中心的磁场均匀区内产生by=aysinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为
[0053]
分别建立8个目标函数,利用最小二乘法分别求出8个squid传感器输出的正弦信号的峰值
[0054]
通过和ay分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈y轴之间的夹角
[0055]
停止向y轴线圈中通入电流,利用电流源向三轴亥姆霍兹线圈的z轴通入正弦电流从而使三轴亥姆霍兹线圈的z轴在线圈中心的磁场均匀区内产生bz=azsinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为
[0056]
分别建立8个目标函数,利用最小二乘法分别求出8个
squid传感器输出的正弦信号的峰值通过和az分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈z轴之间的夹角
[0057]
本发明与现有技术相比,有益效果在于:
[0058]
利用三轴亥姆霍兹线圈产生已知参数的磁场与squid传感器实际测量值对比的方式从而分别求得了8个squid磁强计传感器的拾取环敏感轴方向的矢量转换到高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
的三个坐标轴上所需要知道的角度参数,从而完成了高温超导全张量磁梯度探头非正交误差的校正,该方法相对于传统方法的好处是三轴亥姆霍兹线圈产生的磁场相对于国际地磁场模型求得的磁场更加准确,因此提高了非正交误差的校正精度,另一方面,由于不需要像传统方法那样在运动过程中进行误差参数的求解从而避免了因为运动产生的磁干扰从而对误差校正结果造成的影响。
附图说明
[0059]
图1为高温超导全张量磁梯度探头中8个squid磁强计传感器的安装位置示意图;
[0060]
图2为高温超导全张量磁梯度探头固定在三轴亥姆霍兹线圈中的磁场均匀区示意图;
[0061]
图3为squid传感器敏感轴所在轴向在三轴亥姆霍兹线圈正交直角坐标系o-xyz中与x、y、z轴夹角示意图;
[0062]
图4为根据x1、y4、z7轴建立高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
并求取y4轴在xsoys平面上的投影与ys轴的夹角θ
14
示意图;
[0063]
图5为求取y5轴在xsoys平面上的投影与ys轴的夹角θ
15
示意图;
[0064]
图6为求取y6轴在xsoys平面上的投影与ys轴的夹角θ
16
示意图;
[0065]
图7为求取x2轴在xsoys平面上的投影与xs轴的夹角θ
24
示意图;
[0066]
图8为求取x3轴在xsoys平面上的投影与xs轴的夹角θ
34
示意图;
[0067]
图9为求取z8轴与z7轴的夹角ε
78
示意图。
具体实施方式
[0068]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0069]
一种高温超导全张量磁梯度探头的非正交误差校正方法,该方法包括:
[0070]
在含有8个squid磁强计的高温超导全张量磁梯度探头中,对高温超导全张量磁梯度探头坐标系三个轴向布置的squid磁强计传感器之间的非正交误差角度进行测量;
[0071]
三轴亥姆霍兹线圈产生已知参数的磁场与squid传感器实际测量值对比,求得8个squid磁强计传感器的拾取环敏感轴方向的矢量转换到高温超导全张量磁梯度探头正交直角坐标系的三个坐标轴上所需要的角度参数,完成坐标转化;
[0072]
采用转换后的温超导全张量磁梯度探头正交直角坐标系的三个坐标轴上所需要的角度参数,对磁梯度全张量的独立分量进行非正交误差的校正。
[0073]
如图1所示为高温超导全张量磁梯度探头中8个squid磁强计传感器的安装位置示
意图,squid传感器的编号为si(i=1,2
……
8),箭头方向为squid传感器拾取环敏感轴方向,如图2所示将高温超导全张量磁梯度测量系统调试到工作状态并将探头安装在三轴亥姆霍兹线圈的中心位置;
[0074]
利用电流源向三轴亥姆霍兹线圈的x轴通入正弦电流从而使三轴亥姆霍兹线圈的x轴在线圈中心的磁场均匀区内产生b
x
=a
x
sinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为(i=1,2
……
8代表传感器编号);
[0075]
分别建立8个目标函数,(i=1,2
……
8代表传感器编号),利用最小二乘法可以分别求出8个squid传感器输出的正弦信号的峰值和8个squid传感器的零点偏移误差
[0076]
通过和a
x
可以分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈x轴之间的夹角(i=1,2
……
8代表传感器编号);
[0077]
停止向x轴线圈中通入电流,利用电流源向三轴亥姆霍兹线圈的y轴通入正弦电流从而使三轴亥姆霍兹线圈的y轴在线圈中心的磁场均匀区内产生by=aysinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为(i=1,2
……
8代表传感器编号);
[0078]
分别建立8个目标函数,(i=1,2
……
8代表传感器编号),利用最小二乘法可以分别求出8个squid传感器输出的正弦信号的峰值
[0079]
通过和ay可以分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈y轴之间的夹角(i=1,2
……
8代表传感器编号);
[0080]
停止向y轴线圈中通入电流,利用电流源向三轴亥姆霍兹线圈的z轴通入正弦电流从而使三轴亥姆霍兹线圈的z轴在线圈中心的磁场均匀区内产生bz=azsinx随时间变化的磁场,与电流源提供的电流信号同步采集8个squid传感器的输出为(i=1,2
……
8代表传感器编号);
[0081]
分别建立8个目标函数,(i=1,2
……
8代表传感器编号),利用最小二乘法可以分别求出8个squid传感器输出的正弦信号的峰值通过和az可以分别求出8个squid传感器拾取环敏感轴方向与三轴亥姆霍兹线圈z轴之间的夹角(i=1,2
……
8代表传感器编号);
[0082]
分别定义s1、s2、s3、s4、s5、s6、s7和s8传感器的敏感轴为x1轴、x2轴、x3轴、y4轴、y5轴、y6轴、z7轴、z8轴;如图3所示,三轴亥姆霍兹线圈的坐标系为o-xyz,在坐标系o-xyz中,根据x1轴、x2轴、x3轴、y4轴、y5轴、y6轴、z7轴、z8轴与x轴、y轴、z轴之间的夹角αi、βi、γi(i=1,2
……
8代表传感器编号)可以分别得到x1轴、x2轴、x3轴、y4轴、y5轴、y6轴、z7轴、z8轴的法向量坐标,根据定理:空间直角坐标系中两个向量a=(x1,y1,z1)和b=(x2,y2,z2)之间的夹角
可以分别求得如图4、5、6、7、8中所示的夹角α
17
、α
27
、α
37
、β
47
、β
57
、β
67
、γ
14
、γ
15
、γ
16
、γ
24
、γ
34
;s1号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角α
17
、s2号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角α
27
、s3号squid传感器与s7号squid传感器拾取环敏感轴之间的夹角α
37
、s4号squid与s7号squid传感器的拾取环敏感轴之间的夹角β
47
、s5号squid与s7号squid传感器拾取环敏感轴之间的夹角β
57
、s6号squid传感器与s7号squid传感器的拾取环敏感轴之间的夹角β
67
、s1号squid传感器与s4号squid传感器的拾取环敏感轴之间的夹角γ
14
、s1号squid传感器与s5号squid传感器拾取环敏感轴之间的夹角γ
15
、s1号squid传感器与s6号squid传感器拾取环敏感轴之间的夹角γ
16
、s2号squid传感器与s4号squid传感器拾取环敏感轴之间的夹角γ
24
、s3号squid传感器与s4号squid传感器拾取环敏感轴之间的夹角γ
34
;
[0083]
建立如图4所示的高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
,其中z7轴与zs轴重合,xs轴在平面x1oz7内;在高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
中,在x1轴和y4轴上分别取a点和b点,使oa=ob,则可以得出a、b两点的坐标为:
[0084]
a(oa
·
sinα
17
,0,oa
·
cosα
17
),b(oa
·
sinβ
47
·
sinθ,oa
·
sinβ
47
·
cosθ,oa
·
cosβ
47
),
[0085]
则a、b两点之间的距离为:
[0086][0087]
在三角形oab中根据余弦定理可得:
[0088][0089]
联立两式可得:
[0090]
2oa
2-2oa2·
sinα
17
·
sinβ
47
·
sinθ
14-2oa2·
cosα
17
·
cosβ
47
=oa2 ob
2-2
·
oa
·
ob
·
cosγ
14
[0091]
整理得:
[0092][0093]
同理可得:
[0094]
在图7的高温超导全张量磁梯度探头正交直角坐标系o-x
syszs
中,在x2轴和y4轴上分别取c点和d点,使oc=od,则可以得出c、d两点的坐标为:
[0095]
c(oc
·
sinα
27
·
cosθ
24
,oc
·
sinα
27
·
sinθ
24
,oc
·
cosα
27
)d(od
·
sinβ
47
·
sinθ
14
,od
·
sinβ
47
·
cosθ
14
,od
·
cosβ
47
)
[0096]
则c、d两点之间的距离为:
[0097][0098]
在三角形ocd中根据余弦定理联立上式可得:
[0099]
[0100]
又因为sin2θ
24
cos2θ
24
=1
[0101]
联立两式可得:
[0102][0103]
其中
[0104]
同理可得:
[0105]
其中
[0106]
如图9所示z7轴与z8轴之间的夹角
[0107][0108]
设传感器s1、s2、s3、s4、s5、s6、s7、s8的输出分别为b1、b2、b3、b4、b5、b6、b7、b8,则经过非正交误差校正后的磁梯度全张量的5个独立分量为:
[0109][0110][0111][0112][0113][0114]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。