技术特征:
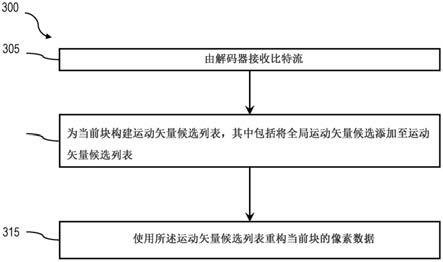
1.一种解码器,所述解码器包括电路,所述电路配置成:接收比特流;为当前块构建运动矢量候选列表,其中,构建所述运动矢量候选列表还包括将单个全局运动矢量候选添加至所述运动矢量候选列表,所述单个全局运动矢量候选基于由所述当前块利用的全局运动模型来选择;以及使用所述运动矢量候选列表重构所述当前块的像素数据。2.根据权利要求1所述的解码器,其中,所述单个全局运动矢量候选基于全局运动模型类型至候选的预定义映射来选择。3.根据权利要求1所述的解码器,其中,所述单个全局运动矢量候选包括控制点运动矢量。4.根据权利要求3所述的解码器,其中,所述控制点运动矢量是平移运动矢量。5.根据权利要求3所述的解码器,其中,所述控制点运动矢量是四参数仿射运动模型的矢量。6.根据权利要求3所述的解码器,其中,所述控制点运动矢量是六参数仿射运动模型的矢量。7.根据权利要求1所述的解码器,还包括:熵解码器处理器,所述熵解码器处理器配置成接收所述比特流并将所述比特流解码为量化系数;逆量化和逆变换处理器,所述逆量化和逆变换处理器配置成处理所述量化系数,包括执行逆离散余弦;解块过滤器;帧缓冲器;以及帧内预测处理器。8.根据权利要求1所述的解码器,其中,所述当前块形成四叉树加二叉决策树的一部分。9.根据权利要求1所述的解码器,其中,所述当前块是编码树单元。10.根据权利要求1所述的解码器,其中,所述当前块是编码单元。11.根据权利要求1所述的解码器,其中,所述当前块是预测单元。12.根据权利要求1所述的解码器,其中,所述全局运动模型包括平移运动。13.根据权利要求1所述的解码器,其中,所述全局运动模型包括仿射运动。14.根据权利要求1所述的解码器,其中,所述全局运动模型的特征在于所述比特流的标头,所述标头包括图片参数集。15.根据权利要求1所述的解码器,其中,所述全局运动模型的特征在于所述比特流的标头,所述标头包括序列参数集(sps)。16.一种方法,所述方法包括:由解码器接收比特流;为当前块构建运动矢量候选列表,其中,构建所述运动矢量候选列表还包括将单个全局运动矢量候选添加至所述运动矢量候选列表,所述单个全局运动矢量候选基于由所述当前块利用的全局运动模型来选择;以及
使用所述运动矢量候选列表重构所述当前块的像素数据。17.根据权利要求16所述的方法,其中,所述单个全局运动矢量候选基于全局运动模型类型至候选的预定义映射来选择。18.根据权利要求16所述的方法,其中,所述单个全局运动矢量候选包括控制点运动矢量。19.根据权利要求18所述的方法,其中,所述控制点运动矢量是平移运动矢量。20.根据权利要求18所述的方法,其中,所述控制点运动矢量是四参数仿射运动模型的矢量。21.根据权利要求18所述的方法,其中,所述控制点运动矢量是六参数仿射运动模型的矢量。22.根据权利要求16所述的方法,其中,所述解码器还包括:熵解码器处理器,所述熵解码器处理器配置成接收所述比特流并将所述比特流解码为量化系数;逆量化和逆变换处理器,所述逆量化和逆变换处理器配置成处理所述量化系数,包括执行逆离散余弦;解块过滤器;帧缓冲器;以及帧内预测处理器。23.根据权利要求16所述的方法,其中,所述当前块形成四叉树加二叉决策树的一部分。24.根据权利要求16所述的方法,其中,所述当前块是编码树单元。25.根据权利要求16所述的方法,其中,所述当前块是编码单元。26.根据权利要求16所述的方法,其中,所述当前块是预测单元。27.根据权利要求16所述的方法,其中,所述全局运动模型包括平移运动。28.根据权利要求16所述的方法,其中,所述全局运动模型包括仿射运动。29.根据权利要求16所述的方法,其中,所述全局运动模型的特征在于所述比特流的标头,所述标头包括图片参数集。30.根据权利要求16所述的方法,其中,所述全局运动模型的特征在于所述比特流的标头,所述标头包括序列参数集(sps)。
技术总结
一种解码器,其包括电路,该电路配置成:接收比特流;为当前块构建运动矢量候选列表,包括将单个全局运动矢量候选添加至运动矢量候选列表,所述单个全局运动矢量候选基于由当前块利用的全局运动模型来选择;以及使用所述运动矢量候选列表重构当前块的像素数据。还描述了相关的设备、系统、技术和物品。技术和物品。技术和物品。
技术研发人员:H
受保护的技术使用者:OP方案有限责任公司
技术研发日:2020.04.24
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。