1.本发明涉及视频编码,并且尤其涉及对由可穿戴相机捕获的视频进行编码。
背景技术:
2.可穿戴相机例如由警察用于在巡逻和事故期间捕获视频流。这样的相机也可以被称为穿戴式相机bwc。可穿戴相机通常由电池供电。因此,可穿戴相机的可用电力是有限的。此外,可穿戴相机可以经由无线连接而传输捕获的视频流。因此,可用于这样的传输的比特率也是与视频流的编码相关的限制因素。
技术实现要素:
3.本发明的一个目的是促进由可穿戴相机生成的视频流的比特率节省和/或电池节省。
4.根据第一方面,提供了一种用于对由可穿戴相机捕获的视频进行编码的方法。该方法包括确定待编码的图像帧的旋转中心。旋转中心与可穿戴相机在捕获视频时的旋转相关。图像帧包括多个像素组。该方法进一步包括为图像帧的多个像素组设定压缩等级,其中,图像帧的多个像素组的压缩等级使得压缩的等级随着距旋转中心的径向距离的增加而增加。该方法进一步包括使用压缩等级对图像帧进行编码。
5.发明人已经意识到当使用时可穿戴相机的旋转移动的发生,并且这种旋转移动导致了所捕获的图像的移动。对于这种旋转移动,像素组在连续图像帧之间的移动将随着距图像帧中的旋转中心的径向距离的增加而增加,该旋转中心与可穿戴相机的图像传感器的旋转中心相对应。这将导致运动矢量随着距旋转中心的径向距离而无法识别的风险增加,这将导致高比特率问题,从而增加了必须使用帧内编码而不是使用通常更少比特消耗的帧间编码来对像素块进行编码的风险。对于最适合(例如,通过配置/优化)识别平移运动的运动估计算法,这种风险将更加突出。因此,引入了特定的压缩原理,其中,压缩等级随着距旋转中心的径向距离的增加而增加。
6.通过随着距旋转中心的径向距离而增加压缩的等级,相对于压缩的等级是否与旋转中心的压缩的等级一致,降低了对包括图像帧的视频进行编码所需的总比特率。
7.降低比特率是有益的,例如,因为无线传送最终的视频流所需的带宽减少了,并且存储最终的视频流所需的存储空间减少了。
8.由于运动矢量随着距旋转中心的径向距离而识别失败的风险增加,像素组的比特率成本通常也会随着距像素组的旋转中心的径向距离的增加而增加。因此,随着距旋转中心的径向距离而增加的压缩的等级将导致比特率成本更高的像素组的压缩的更高等级。
9.此外,因为运动模糊的影响通常将会随着距旋转中心的径向距离的增加而增加,因此借助于更靠近旋转中心的更低压缩来实现更高的图像质量(分辨率)是有利的,在旋转中心,运动模糊通常是最低的。
10.由于图像帧的更靠近旋转中心的部分也可能是比更远离旋转中心的更外围部分
更感兴趣的部分,因此借助于更靠近旋转中心的更低压缩来实现更高的图像质量(分辨率)是有利的。
11.另外,由于运动模糊的影响通常将会随着距旋转中心的径向距离的增加而增加,因此更远离旋转中心的图像质量的损失将无关紧要,因为更远离旋转中心的运动模糊的影响无论如何都将会影响图像质量。
12.像素组可以例如被称为块、宏块或译码(coding)树单元。
13.图像帧的多个像素组的压缩等级例如可以是压缩值(诸如,图像帧的多个像素组的量化参数的值)。
14.该方法的确定旋转中心的动作可以进一步包括:使用来自可穿戴相机中的一个或多个移动传感器的数据来确定旋转中心。
15.该方法可以进一步包括:确定图像帧的运动矢量。然后,确定旋转中心的动作可以进一步包括:使用运动矢量来确定旋转中心。
16.该方法可以进一步包括:确定图像帧的初步旋转中心和设定包括初步旋转中心的运动矢量搜索区域,其中,该运动矢量搜索区域是图像帧的子区域。然后,确定运动矢量的动作可以包括:确定运动矢量搜索区域中的运动矢量。所确定的运动矢量的可靠性通常随着距旋转中心的径向距离的增加而降低。因此,选择作为图像的子区域并且包括初步旋转中心的运动矢量搜索区域将排除图像帧的包括最不可靠的运动矢量的区域。因此,能够更可靠地识别旋转中心。
17.该方法可以进一步包括获取先前图像帧的先前旋转中心。然后,确定初步旋转中心的动作可以包括:确定图像帧的与先前旋转中心相对应的初步旋转中心。旋转中心倾向于在连续的图像帧之间四处移动,但不是很大。因此,先前旋转中心,即,先前图像帧的旋转中心是用作初步旋转中心的良好近似。优选地,先前旋转中心是紧接在前的图像帧的旋转中心。
18.该方法可以进一步包括:确定可穿戴相机在捕获图像帧时的角速度。然后,在设定压缩等级的动作中,压缩的等级随着距旋转中心的径向距离增加的速率可以是基于角速度的。随着图像帧中的运动量增加,增加压缩的等级的动机变得更大。对于旋转,图像帧中的运动取决于距旋转中心的径向距离,而且取决于角速度。对于更高的角速度,在距旋转中心相同的径向距离处,运动会更高。因此,不仅随着距旋转中心的径向距离而增加压缩的等级,而且基于角速度增加速率是有益的。更高角速度的图像质量的损失将无关紧要,因为更高角速度下的运动模糊的影响无论如何都会影响图像质量。
19.该方法可以进一步包括:确定图像帧的运动矢量。然后,在设定压缩等级的动作中,压缩的等级随着距旋转中心的径向距离增加的速率可以是基于运动矢量的。例如,压缩的等级增加的速率可以基于运动矢量的长度随着距旋转中心的径向距离增加的速率。
20.根据第二方面,提供了一种非瞬态计算机可读介质。非瞬态计算机可读介质具有可能采取计算机可读程序代码的形式存储在其上的指令,该指令当在具有处理能力的设备上执行时,被配置为执行第一方面的方法。具有处理能力的设备可以是可穿戴相机(例如,穿戴式相机)。
21.根据第一方面的方法的上述特征在适用时也适用于该第二方面。为避免重复,请参考上文。
22.根据第三方面,提供了一种可穿戴相机。可穿戴相机包括图像传感器、电路和编码器。图像传感器被配置为捕获图像数据。电路被配置为执行旋转中心确定功能,该旋转中心确定功能被配置为确定待编码的图像帧的旋转中心。旋转中心与可穿戴相机在捕获视频时的旋转相关。图像帧基于图像数据并且包括多个像素组。该电路进一步被配置为执行压缩等级设定功能,该压缩等级设定功能被配置为:为图像帧的多个像素组设定压缩等级,其中,图像帧的多个像素组的压缩等级使得压缩的等级随着距旋转中心的径向距离的增加而增加。编码器被配置为使用由压缩等级设定功能设定的压缩等级将图像帧编码成视频流。
23.可穿戴相机可以进一步包括:用于确定可穿戴相机的移动数据的移动传感器。然后,旋转中心确定功能可以进一步被配置为使用来自移动传感器的移动数据来确定旋转中心。
24.可穿戴相机的编码器可以进一步被配置为确定图像帧的运动矢量。然后,旋转中心确定功能可以进一步被配置为使用运动矢量来确定旋转中心。
25.可穿戴相机的电路可以进一步被配置为执行初步旋转中心确定功能以及运动矢量搜索区域设定功能,该初步旋转中心确定功能被配置为确定图像帧的初步旋转中心,该运动矢量搜索区域设定功能被配置为设定包括初步旋转中心的运动矢量搜索区域,运动矢量搜索区域是图像帧的子区域。然后,编码器可以被配置为确定运动矢量搜索区域中的运动矢量。
26.可穿戴相机的电路可以进一步被配置为执行先前旋转中心获取功能,该先前旋转中心获取功能被配置为获取先前图像帧的先前旋转中心。然后,初步旋转中心确定功能可以被配置为确定图像帧的与先前旋转中心相对应的初步旋转中心。
27.可穿戴相机的电路可以进一步被配置为执行角速度确定功能,该角速度确定功能被配置为确定可穿戴相机在捕获图像帧时的角速度。然后,在压缩等级设定功能中,压缩的等级随着距旋转中心的径向距离增加的速率可以是基于角速度的。
28.可穿戴相机的编码器可以进一步被配置为确定图像帧的运动矢量。然后,在压缩等级设定功能中,压缩的等级随着距旋转中心的径向距离增加的速率可以是基于运动矢量的。
29.本发明的适用性的进一步范围将从下面给出的详细描述中变得显而易见。但是,应当理解的是,详细描述和具体示例在表示本发明的优选实施例的同时,仅通过说明的方式给出,因为从该详细描述中,在本发明范围内的各种变化和修改对本领域技术人员来说,将变得显而易见。
30.因此,要理解的是,本发明不限于所描述的设备的特定组成部分或所描述的方法的动作,因为这样的设备和方法可以变化。还要理解的是,本文使用的术语仅是为了描述特定实施例的目的,而不旨在限制。必须注意,除非上下文另有明确规定,否则如在说明书和所附权利要求中使用的冠词“一”、“该”和“所述”旨在表示存在要素中的一个或多个。因此,例如,对“一单元”或“该单元”的引用可以包括多个设备等。此外,词语“包括”、“包含”、“含有”和类似的词语不排除其他要素或步骤。
附图说明
31.现在,将参考附图更详细地描述本发明的以上和其他方面。附图不应被认为是限
制性的,而是相反地用于解释和理解。贯穿全文,相同的附图标记指代相同的元件。
32.图1是可穿戴相机的示意框图。
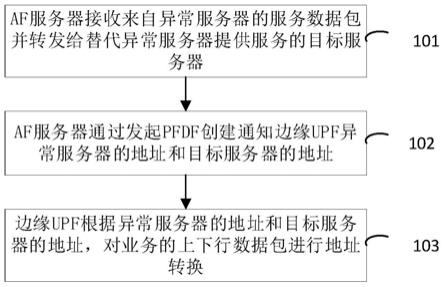
33.图2是对由可穿戴相机捕获的视频进行编码的方法流程图。
具体实施方式
34.现在,将在下文中参考附图更全面地描述本发明,其中示出了本发明的当前优选实施例。然而,本发明可以以许多不同的形式体现并且不应被解释为限于本文阐述的实施例。相反,提供这些实施例是为了彻底性和完整性,并且将本发明的范围传达给技术人员。
35.图1图示了可穿戴相机100。可穿戴相机100可以是穿戴式相机bwc。可穿戴相机100可以是单独的单元,或者它可以集成在诸如头盔、眼镜等的另一单元中。可穿戴相机100可以例如由警察用于在巡逻和事故期间捕获视频和可能的其他数据。捕获的数据随后可能需要被作为证据,例如,当调查犯罪和起诉犯罪嫌疑人时。为了保存所捕获的数据,可使用可穿戴相机100外部的数据管理系统(诸如,视频管理系统或证据管理系统)。这样的数据管理系统通常提供捕获的数据的存储,并且还可以实时查看所捕获的数据或者作为记录数据的回放来查看所捕获的数据。通常,可穿戴相机100是电池供电的,并且具有有限的比特率。后者可能是由于本地数据存储有限和/或由于用于无线连接到数据管理系统或无线连接到查看实时馈送的中心的带宽限制。此外,用于无线连接的带宽限制可能会随时间变化,使得比特率有时会变得更加有限。可穿戴相机100包括图像传感器110、电路130和编码器120。
36.图像传感器110被配置为捕获图像数据。图像数据可以例如是图像帧的数据。图像传感器和图像数据的捕获对于本领域技术人员来说是众所周知的,并且在本公开中将不再进行任何更详细地讨论。
37.编码器120被配置为将由图像传感器110捕获的图像数据编码成视频流,有时,由编码器120提供的视频流被称为编码后的视频流。通常,视频编码器120被配置为将视频流的图像帧中的一些编码为帧内帧或关键帧,并且将视频流的图像帧中的一些编码为帧间帧或增量帧。帧内帧是不需要来自待解码的其他编码后的视频帧的信息的编码后的视频帧。因此,帧内帧基于来自被设定为对应的视频数据的图像帧的信息来编码。通常,图像帧内的相似性用于将图像帧编码为帧内帧。在视频编码中,帧内帧通常被称为i帧。视频流的在两个帧内帧之间的图像帧被编码为帧间帧。通常,帧间帧仅包括从一帧到下一帧发生的变化。因此,帧间帧通常比帧内帧包括更少的数据。在视频编码中,帧间帧通常被称为p帧或b帧。p帧指代用于数据参考的先前帧。因此,为了解码p帧,必须知道先前帧的内容。b帧可以指代用于数据参考的参考先前帧和前向帧两者。因此,为了解码b帧,必须知道先前帧和前向帧两者的内容。当对帧间帧进行编码时,图像帧被分成多个像素组。像素组可以例如被称为块、宏块或译码树单元。将图像帧与参考帧进行比较。例如,用于对p帧进行编码的参考帧是先前图像帧。匹配算法用于识别待编码的图像帧与参考帧之间的匹配像素组,并且如果针对像素组找到匹配,则像素组可被编码为运动矢量,该运动矢量指定像素组自参考帧以来在图像帧中如何移动。确定运动矢量有时被称为运动估计。如果由于相机或捕获场景中物体的快速移动而导致移动是大的,则运动估计可能无法识别运动矢量。针对待编码的图像帧识别的运动矢量越少,最终的编码后的帧间帧的比特大小将变得越大,并且因此,传输编码后的帧间帧将需要更大的带宽。
38.电路130被配置为执行可穿戴相机100的功能。电路130可以包括诸如中央处理单元(cpu)、微控制器或微处理器的处理器132。处理器132被配置为执行程序代码。程序代码可以例如被配置为执行可穿戴相机100的功能。
39.可穿戴相机100可以进一步包括用于确定可穿戴相机的移动数据的移动传感器140。移动传感器140被配置为测量可穿戴设备的移动数据。移动传感器140可以包括陀螺仪和/或加速度计。陀螺仪被配置为采取可穿戴相机100的定向和/或角速度的形式测量移动数据。加速度计被配置为在其自身瞬时静止帧中采取可穿戴相机100的加速度(或速度变化率)形式测量移动数据。移动传感器140被配置为根据时间对移动数据进行采样。
40.可穿戴相机100可以进一步包括本地数据存储150。本地数据存储150可以被配置为存储视频流。本地数据存储通常具有有限的数据存储容量。本地数据存储150可以是适合于存储视频流的任何类型的本地数据存储。例如,本地数据存储150可以采取sd读卡器和sd卡的形式。本地数据存储150的另一示例可以采取闪存(例如,nand闪存)的形式。
41.可穿戴相机100可以进一步包括发射器160。发射器160可以被配置为将视频流无线传送到数据管理系统。发射器160可以被配置为将所捕获的视频流连续地传输到视频管理系统。由于无线传输可用的带宽,无线传输通常受到限制。
42.可穿戴相机100可以进一步包括存储器170。存储器170可以是缓存、闪存、硬盘驱动器、可移动介质、易失性存储器、非易失性存储器、随机存取存储器(ram)或其他合适的设备中的一个或多个。在典型设置中,存储器170可以包括用于长期数据存储的非易失性存储器和用作电路130的系统存储器的易失性存储器。存储器170可以通过数据总线与电路130交换数据。也可以存在伴随的控制线以及存储器170和电路130之间的地址总线。
43.可穿戴相机100的功能可以采取可执行逻辑例程(例如,代码行、软件程序等)的形式来体现,可执行逻辑例程存储在可穿戴相机100的非瞬态计算机可读介质(例如,存储器170)上并且由电路130执行(例如,使用处理器132)。此外,可穿戴相机100的功能可以是独立的软件应用程序或形成执行与可穿戴相机100相关的附加任务的软件应用程序的一部分。所描述的功能可以被认为是一种由处理单元(例如,电路130的处理器132)经配置而执行的方法。另外,虽然所描述的功能可以在软件中实现,但是这样的功能也可以经由专用硬件或固件或者硬件、固件和/或软件的某种组合来执行。
44.电路130被配置为执行旋转中心确定功能181。旋转中心确定功能181被配置为确定待编码的图像帧的旋转中心。旋转中心与可穿戴相机在捕获视频时的旋转相关。具体地,图像帧的旋转中心与图像传感器旋转中心相对应,可穿戴相机100在捕获图像帧所基于的图像数据时围绕该图像传感器旋转中心旋转。图像帧通常被划分成用于对图像帧进行编码的多个像素组。
45.电路130被配置为执行压缩等级设定功能182。压缩等级设定功能182被配置为为图像帧的多个像素组设定压缩等级。图像帧的多个像素组的压缩等级被设定为使得压缩的等级随着距旋转中心的径向距离的增加而增加。通常,如果第一像素组距旋转中心的径向距离大于第二像素组,则第一像素组将比第二像素组具有压缩的更高等级。压缩的等级可以随着距旋转中心的径向距离而连续增加。然而,压缩的等级也可以逐步增加,使得距旋转中心的第一径向距离范围内的第一像素组具有相同的压缩的第一等级,距旋转中心的第二径向距离(包括大于第一径向距离范围的径向距离)范围内的第二像素组具有相同的压缩
的第二等级等。
46.增加压缩的等级可以进一步不均匀地进行,使得例如与在垂直方向上的距离相比,压缩的等级随着在水平方向上距旋转中心的距离的增加而以更高的速率增加。对于这样的不均匀的增加,沿旋转中心的水平线在距旋转中心给定距离处的压缩的等级将比沿与旋转中心成大于0度角的线在距旋转中心该给定距离处的压缩的等级高。通常,压缩的等级不仅可以基于由于更远离旋转中心的更高运动程度而导致的压缩需要,还可以基于图像帧的不同部分中的预期兴趣等级。例如,可以使得在水平方向上的图像帧的外围比在垂直方向上的图像帧的外围更不令人感兴趣。
47.压缩等级可以与指示压缩的等级的不同测量和属性相关。例如,压缩等级可以与诸如量化参数的值的压缩值相关,使得量化参数的值被设定为使得它们随着距旋转中心的径向距离的增加而增加。在这种情况下,如果第一像素组距旋转中心的径向距离大于第二像素组,则第一像素组将比第二像素组具有更高的量化参数的值。这可以例如借助于梯度量化参数图(qmap)来实现。
48.压缩等级可以进一步描述或指示编码所需的比特率。因此,只要所需的比特率变低,就认为压缩的等级会变高,而无需考虑用于实现所需的更低比特率的手段或过程。例如,可以通过取决于距旋转中心的径向距离对块使用不同的编码方案来增加压缩的等级。这样的编码的示例是针对图像组使用跳块(skip block)或dc译码(即,单色)的i块,这将导致与将它们编码为普通p块或b块相关的压缩的更高等级。跳块没有图像信息或预测信息,并且解码器将跳块解释为与先前帧的对应块(像素组)相同的块(像素组)。跳块可能仍然具有从它的邻居那里继承的运动矢量。然而,没有信息被编码。为了增加压缩的等级,块类型(i、p、skip)的选择可能有偏差,使得与压缩的更高等级相对应的块类型的概率随着距旋转中心的距离增加而增加。
49.然后,编码器120可以被配置为使用由压缩等级设定功能182设定的压缩等级将图像帧编码成视频流。
50.随着距旋转中心的径向距离增加压缩等级将降低这样的编码后的帧的视频流的比特率,该比特率将低于如果视频流包括在旋转中心处具有相同压缩等级但没有随着距旋转中心的径向距离的增加而增加的压缩等级的图像帧的比特率。此外,随着距旋转中心的径向距离增加压缩等级将为靠近旋转中心的像素组保持高质量(低压缩)。这是有益的,因为这些像素组受运动模糊的影响较小,需要较少的比特率以用于编码,更容易找到相应的运动矢量,并且由于它们描绘了可穿戴相机正前方是什么,因此通常与感兴趣的区域相关。此外,大部分降低的比特率是通过相对于旋转中心的外围压缩的更高等级来实现的。对于这样的像素组的更高的压缩等级是有益的,因为这些像素组受运动模糊的影响更大,需要更高的比特率以用于编码,更难找到相应的运动矢量,并且由于它们描绘了与旋转中心相关的外围是什么,因此通常与不太感兴趣的区域相关。与在图像帧中均匀地增加压缩和降低帧速率相比,这些降低比特率的方法不会实现上述指出的好处。
51.旋转中心确定功能181可以被配置为使用来自例如包括陀螺仪和/或加速度计的移动传感器140的移动数据来确定旋转中心。
52.编码器120可以被配置为确定图像帧的运动矢量。旋转中心确定功能181进一步被配置为使用运动矢量确定旋转中心。对于旋转移动,运动矢量将产生围绕旋转中心的圆形
图案,并随着距旋转中心的径向距离的增加而增加长度。因此,可以使用合适的算法来分析识别的运动矢量以确定旋转中心。
53.电路130可以被配置为执行初步旋转中心确定功能183和运动矢量搜索区域设定功能184。初步旋转中心确定功能183被配置为确定图像帧的初步旋转中心。运动矢量搜索区域设定功能184被配置为设定包括初步旋转中心的运动矢量搜索区域,其中,运动矢量搜索区域是图像帧的子区域。然后,编码器120可以被配置为确定运动矢量搜索区域中的运动矢量。然后,旋转中心确定功能181可以被配置为使用运动矢量搜索区域中的运动矢量确定旋转中心。这样做的基础是:确定的运动矢量的可靠性通常随着距旋转中心的径向距离的增加而降低,因为像素组在两个连续图像帧之间移动的径向距离随着距旋转中心的径向距离的增加而增加,这反过来又使确定运动矢量的难度增加。因此,仅使用子区域中的运动矢量将排除图像帧的包括最不可靠的运动矢量的区域。因此,能够更可靠地识别旋转中心。运动矢量搜索区域可以例如被设定为使得它包括可以以期望的可靠性为其确定运动矢量的像素组。然后,编码器120可以被配置为确定图像帧的运动矢量搜索区域外部的运动矢量。然而,这样的运动矢量然后将仅被编码器120使用以对图像帧进行编码,并且不被旋转中心确定功能181使用以确定旋转中心。
54.编码器120可以可替代地被配置为仅在运动矢量搜索区域中确定图像帧的运动矢量。在这种情况下,运动矢量搜索区域可以被设定为排除编码器120有可能无法确定超过阈值的运动矢量的像素组。无法确定的可能性将随着运动的增加而增加。因此,可以将排除的像素组选为距初步旋转中心大于阈值径向距离的像素组。阈值径向距离可以例如基于角速度。对于所排除的像素组,即,尚未确定运动矢量的像素组,可以进一步增加压缩的等级,以补偿编码所需的额外比特率,而无需任何识别的运动矢量。可以借助于为尚未确定运动矢量的像素组调整量化参数值来实现压缩的增加的等级。可替代地,尚未为其确定运动矢量的像素组可被编码为跳块或dc译码(即,单色)的i块。
55.电路130可以被配置为执行先前旋转中心获取功能185。先前旋转中心获取功能185被配置为获取先前图像帧的先前旋转中心。然后,初步旋转中心确定功能183可以被配置为确定图像帧的与先前旋转中心相对应的初步旋转中心。由于旋转中心通常不会在连续图像帧之间移动很远,因此使用先前图像帧的先前旋转中心通常是用作初步旋转中心的良好近似。
56.该电路可以被配置为执行角速度确定功能186。角速度确定功能186被配置为确定可穿戴相机在捕获图像帧时的角速度。然后,压缩等级设定功能182可以被配置为使得压缩的等级随着距旋转中心的径向距离增加的速率是基于角速度的。通常,压缩的等级应该随着图像帧中运动量的增加而增加。对于旋转,图像帧中的运动量取决于距旋转中心的径向距离,而且取决于角速度。对于更高的角速度,在距旋转中心相同的径向距离处的运动量将大于其在更低角速度下所具有的运动量。因此,对于更高的角速度,随着距旋转中心的径向距离的增加,压缩的等级可以以更高的速率增加,使得在距旋转中心的相同径向距离处,压缩的等级将高于其在更低角速度下所具有的压缩的等级。角速度可以借助于来自移动传感器140(例如,借助于陀螺仪)的数据来确定。
57.可替代地或另外,基于由编码器120确定的运动矢量,压缩等级设定功能182可以被配置为使得压缩的等级随着距旋转中心的径向距离增加的速率是基于运动矢量的。例
如,对于更高的角速度,所确定的运动矢量的长度将随着距旋转中心的径向距离的增加而以比他们在更低角速度下的情况高的速率增加。因此,压缩的等级增加的速率可以被设定为与运动矢量的长度随着距旋转中心的径向距离增加的速率成比例。类似地,像素组的压缩的等级可以被设定为与其各自的运动矢量的长度成比例。
58.将结合图2讨论用于对由可穿戴相机捕获的视频进行编码的方法200。方法200基于发明人的见解,即,通过随着距旋转中心的径向距离增加压缩等级,可以降低用于编码所需的比特率,而没有相应的大的质量损失,例如,因为压缩的更高等级将适用于携带更少相关信息的像素组和/或即使没有压缩的更高等级也会具有更低质量的像素组。
59.方法200的所有步骤中的一些可以由上述可穿戴相机100的功能来执行。该方法包括以下步骤。除非一个步骤特别依赖于另一个步骤的结果,否则这些步骤可以以任何合适的顺序执行。
60.该方法包括确定s220待编码的图像帧的旋转中心,该旋转中心与可穿戴相机在捕获视频时的旋转相关,并且该图像帧包括多个像素组。方法200进一步包括为图像帧的多个像素组设定s222压缩等级,其中,图像帧的多个像素组的压缩等级使得压缩的等级随着距旋转中心的径向距离的增加而增加。方法200进一步包括使用压缩等级对图像帧进行编码s224。
61.确定s220旋转中心可以进一步包括使用来自可穿戴相机中的一个或多个移动传感器的数据来确定旋转中心。
62.方法200可以进一步包括确定s210图像帧的运动矢量。然后,确定s220旋转中心可以进一步包括利用使用了运动矢量的数据来确定旋转中心。
63.方法200可以进一步包括确定s206图像帧的初步旋转中心和设定s208包括初步旋转中心的运动矢量搜索区域,该运动矢量搜索区域是图像帧的子区域。然后,确定s208运动矢量可以包括确定运动矢量搜索区域中的运动矢量。
64.方法200可以进一步包括获取s204先前图像帧的先前旋转中心。然后,确定s206初步旋转中心可以包括确定图像帧的与先前旋转中心相对应的初步旋转中心。
65.方法200可以进一步包括确定s202可穿戴相机在捕获图像帧时的角速度。在设定s222压缩等级时,压缩的等级随着距旋转中心的径向距离增加的速率是基于角速度的。
66.该方法可以进一步包括将视频流存储在可穿戴相机中。该方法可以进一步包括从可穿戴相机无线传送视频流。该方法可以进一步包括与关于图1描述的可穿戴相机公开的特征相对应的特征。
67.本领域技术人员可以理解,本发明不限于上述实施例。相反,在所附权利要求的范围内,许多修改和变型是可能的。通过研究附图、本公开和所附权利要求,本领域技术人员在实践该要求保护的发明时可以理解和实现这样的修改和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。