1.本发明涉及制造工厂内物品搬送系统中车辆控制装置以及工作方法,更具体地涉及当有线网络问题导致车辆控制装置和特定无线路由器(访问接入点)无法通信时用于执行车辆控制装置和车辆之间的通信的装置以及方法。
背景技术:
2.半导体(或者显示器)制造工艺作为用于在基板(例如:晶圆)上制造半导体元件的工艺,例如包括曝光、蒸镀、蚀刻、离子注入、清洗、封装等。用于制造半导体元件的制造工厂由一个或者其以上层的洁净室构成,用于执行半导体制造工艺的制造设备配置于各层。
3.为了最大化半导体制造工艺的效率,不仅是改善各半导体制造工艺的方法,还导入用于在各制造设备之间迅速且有效地搬送物品(例如:基板)的手段。代表性地,适用有沿着设置于半导体制造工厂的顶棚的路径搬送物品的oht(overhead hoist transport;空中走行式无人搬送车)系统。通常,oht系统包括构成行驶路径的轨道、沿着轨道行驶并搬送物品的车辆。另外,当在半导体制造设备之间的搬送中需要保管物品时,可以设置用于存储相应物品的存储系统。
4.另一方面,可以设置用于控制制造工厂内车辆的车辆控制装置或者车辆控制系统。车辆控制装置通过与车辆的通信来分配作业,并检测各车辆的状态。车辆通过提供无线通信的访问接入点(access point,ap)与车辆控制装置进行通信。访问接入点可以通过有线网(例如:局域网(lan))与车辆控制装置连接。当有线网的局部产生问题时,特定访问接入点和车辆控制装置之间的通信会被切断,位于相应访问接入点提供无线接通的区域即覆盖范围(coverage)的车辆无法实现与车辆控制装置的通信。
技术实现要素:
5.因此,本发明的实施例提供能够使得位于与车辆控制装置无法通信状态的访问接入点的覆盖范围的车辆能够与车辆控制装置进行通信的装置以及方法。
6.本发明的解决课题不限于以上所提及的,本领域技术人员会从下面的记载能够明确地理解未被提及的其它解决课题。
7.可以是,根据本发明的实施例的制造工厂内物品搬送系统中车辆控制装置的工作方法包括:在与制造工厂内各车辆执行无线通信的访问接入点中确认无法与所述车辆控制装置通信的第一访问接入点的步骤;确认位于与所述第一访问接入点的覆盖范围对应的无法通信区域的第一车辆的步骤;向与第二访问接入点接通中的第二车辆,传输要向所述第一车辆传递的第一信息以及指示所述第二车辆向所述无法通信区域行驶的第二信息的步骤。
8.在一实施例中,可以是,所述第一信息包括所述第一车辆的识别信息、所述第一车辆的目标移动位置以及分配给所述第一车辆的作业信息。
9.在一实施例中,可以是,所述第二信息包括指示将所述无法通信区域的位置以及
所述第一信息向所述第一访问接入点传输的指令。
10.在一实施例中,可以是,确认无法通信的所述第一访问接入点的步骤包括:当从所述第一访问接入点不能接收一定时间或者一定次数以上的信号时,确认为所述第一访问接入点是无法通信的状态的步骤。
11.在一实施例中,可以是,车辆控制装置的工作方法还包括:通过第三访问接入点从所述第一车辆接收响应信息的步骤。
12.根据本发明的实施例的制造工厂内物品搬送系统中车辆控制装置包括:通信模组,用于与执行与制造工厂内各车辆无线通信的访问接入点进行通信;以及处理器,通过所述通信模组而控制所述制造工厂内各车辆。可以是,所述处理器在执行与制造工厂内各车辆无线通信的访问接入点中确认无法与所述车辆控制装置通信的第一访问接入点,并确认位于与所述第一访问接入点的覆盖范围(coverage)对应的无法通信区域的第一车辆,并且向通过所述通信模组与第二访问接入点接通中的第二车辆传输要向所述第一车辆传递的第一信息以及指示所述第二车辆向所述无法通信区域行驶的第二信息。
13.根据本发明的实施例的制造工厂内物品搬送系统包括:车辆,在所述制造工厂内搬送物品;车辆控制装置,控制所述车辆;以及访问接入点,与所述车辆控制装置通过网络进行通信,并与所述车辆执行无线通信。可以是,所述车辆控制装置在所述访问接入点中确认无法与所述车辆控制装置通信的第一访问接入点,并确认位于与所述第一访问接入点的覆盖范围(coverage)对应的无法通信区域的第一车辆,并且向与第二访问接入点接通中的第二车辆传输要向所述第一车辆传递的第一信息以及指示所述第二车辆向所述无法通信区域行驶的第二信息。
14.根据本发明的实施例,通过位于能够通信的区域的车辆,能够使得能够与接通于与车辆控制装置被切断连接的访问接入点的车辆进行通信。
15.本发明的效果不限于以上提及的,本领域技术人员会从下面的记载能够明确地理解未提及的其它效果。
附图说明
16.图1示出制造工厂内物品搬送系统的例子。
17.图2示出物品搬送系统中用于控制车辆的系统的例子。
18.图3是用于说明车辆控制装置的功能性结构的框图。
19.图4是用于说明物品搬送车辆的功能性结构的框图。
20.图5示出用于访问接入点的无线接通的区域的例子。
21.图6示出访问接入点中发生通信异常的情况。
22.图7以及图8示出用于从车辆控制装置向与无法通信状态的访问接入点接通的车辆传输信息的方法的例子。
23.图9是用于从车辆控制装置向与无法通信状态的访问接入点接通的车辆传输信息的发信号流程图。
24.图10是当从车辆控制装置向与无法通信状态的访问接入点接通的车辆传输信息时与车辆控制装置的工作有关的流程图。
25.图11是当从车辆控制装置向与无法通信状态的访问接入点接通的车辆传输信息
时与接收信息的车辆的工作有关的流程图。
26.图12是当从车辆控制装置向与无法通信状态的访问接入点接通的车辆传递信息时与传递信息的车辆的工作有关的流程图。
27.图13以及图14示出用于与车辆控制装置和无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息的方法的例子。
28.图15是用于与车辆控制装置和无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息的发信号流程图。
29.图16是当与无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息时与车辆控制装置的工作有关的流程图。
30.图17是当与无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息时与传输信息的车辆的工作有关的流程图。
31.图18是当与无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息时与传递信息的车辆的工作有关的流程图。
具体实施方式
32.以下,参照附图来详细说明本发明的实施例,以使得本发明所属技术领域中具有通常知识的人能够容易地实施。本发明可以以各种不同方式实现,不限于在此说明的实施例。
33.为了清楚地说明本发明,省略了与说明无关的部分,贯穿说明书整体对相同或类似的构成要件标注相同的附图标记。
34.另外,在多个实施例中,对具有相同结构的构成要件,使用相同的附图标记来仅说明代表性实施例,在其余的其它实施例中仅说明与代表性实施例不同的结构。
35.在说明书整体中,当表述某部分与其它部分“连接(或者结合)”时,其不仅是“直接连接(或者结合)”的情况,还包括将其它部件置于中间“间接连接(或者结合)”的情况。另外,当表述某部分“包括”某构成要件时,只要没有特别相反记载,其意指可以还包括其它构成要件而不是排除其它构成要件。
36.只要没有不同地定义,包括技术或科学术语在内在此使用的所有术语具有与本发明所属技术领域中具有通常知识的人一般所理解的含义相同的含义。在通常使用的词典中定义的术语之类的术语应解释为具有与相关技术文脉上具有的含义一致的含义,只要在本技术中没有明确定义,不会理想性或过度地解释为形式性含义。
37.图1示出制造工厂内物品搬送系统的例子。可以是,半导体或者显示器制造线由一个或者其以上洁净室构成,在各洁净室中设置用于执行制造工艺的制造设备1。通常,可以通过对基板(例如:晶圆)重复执行多个制造工艺而最终完成被处理的基板,若在特定半导体制造设备1中结束制造工艺,则向用于下一个制造工艺的设备搬送基板。在此,基板可以以保管在能够收纳多个基板的容器(例如:front opening unified pod,foup;前开式晶圆传输盒)中的状态搬送。收纳有基板的容器可以通过车辆(例如:overhead hoist transport,oht)20搬送。
38.车辆20在设置于顶棚的轨道(rail)10上行驶并与指示传送作业命令的上游服务器(车辆控制装置100)以无线通信方式交互。车辆控制装置100从综合控制系统接收与基于
作业工艺的传送相关的命令,为了根据综合控制系统的命令使车辆20在最短时间完成传送作业,搜索从出发地至目的地最短路径并选定位于适合执行传送作业的最佳位置的车辆20并指示传送命令。根据车辆控制装置100的传送命令,车辆20从由车辆控制装置100指示的任意港(port)向目的地港(port)移动物流。
39.参照图1,在半导体或者显示器制造线上设置用于执行工艺的制造设备1,可以提供形成用于在制造设备1之间搬送物品的搬送路径(例如:顶棚轨道)的轨道10以及在轨道10行驶并向制造设备1搬送物品的多个物品搬送车辆20。此时,物品搬送车辆20可以通过沿着轨道10形成的供电单元(例如:电源供应线缆)接收驱动电源。
40.当物品搬送车辆20在制造设备1之间搬送物品时,既可以将物品直接从特定制造设备向其它制造设备搬送,也可以将物品存储于存储装置之后向其它制造设备搬送。在轨道10的一侧可以设置存储装置(例如:物品保管部30)。存储装置可以包括能够为了保持容器内清洁环境而注入惰性气体的架形式的仓储(stocker)以及与轨道10的侧面相邻设置并保管物品的侧轨缓冲器或者设置于轨道10的下方区域并保管物品的轨下缓冲器或者用于维持及维修搬送车辆的维护用升降机。
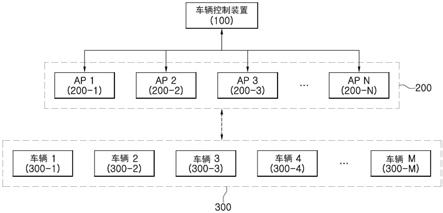
41.图2示出车辆控制系统的例子。根据本发明的实施例的车辆控制系统包括在制造工厂内搬送物品的车辆300、控制车辆300的车辆控制装置100以及与车辆控制装置100通过网络进行通信并与车辆300执行无线通信的访问接入点200。如图2所示,访问接入点200可以提供为多个,车辆300也可以提供为多个。
42.车辆控制装置100从综合控制系统接收与基于作业工艺的传送有关的指令,为了使车辆300根据综合控制系统的指令执行相应传送作业,搜索从出发地至目的地的路径,选定位于适合执行传送作业的最佳位置的车辆300并传输指示传送的信息。另外,车辆控制装置100可以监测各车辆300的状态(例如:位置、移动/停止与否、异常与否),向用户输出与各车辆300有关的信息。
43.访问接入点200通过有线网与车辆控制装置100连接,支持车辆300能够通过无线通信与车辆控制装置100进行通信。访问接入点200可以给车辆300分配用于无线通信的资源,通过无线信道与车辆300交换信号。访问接入点200也可以指称为基站(base station)。各访问接入点200具有能够提供无线接通的区域,访问接入点200能够提供无线接通的区域指称为覆盖范围(coverage)。
44.车辆300可以通过访问接入点200与车辆控制装置100执行无线通信。例如,车辆300可以沿着轨道移动的同时与访问接入点200无线接通。
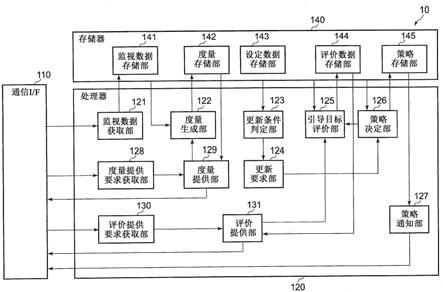
45.图3是用于说明车辆控制装置100的功能性结构的框图。根据本发明的实施例的车辆控制装置100包括与制造工厂内各车辆进行无线通信的用于与访问接入点200通信的通信模组110以及通过通信模组110控制制造工厂内各车辆300的处理器120。另外,车辆控制装置100可以包括存储用于对各车辆300进行控制的信息的存储器130。
46.车辆控制装置100的通信模组110执行用于车辆控制装置100和其它个体的通信的信号处理。例如,通信模组110可以从上游控制系统接收与作业有关的信息(例如:搬送物品、传送位置),并向车辆300传输用于执行相应作业的指令(例如:起点、终点、路径、物品信息)。为了车辆300的通信,将要向车辆300传输的信息与有关车辆300的识别信息一起向无线接通有车辆300的访问接入点200传输。
1,向与第二访问接入点200-2接通中的第二车辆300-2,传输要传递给第一车辆300-1的第一信息以及指示第二车辆300-2向无法通信区域行驶的第二信息。
59.在本发明的实施例中,第一信息可以包括第一车辆300-1的识别信息、第一车辆300-1的目标移动位置以及分配给第一车辆300-1的作业信息。
60.在本发明的实施例中,第二信息可以包括无法通信区域的位置以及指示将第一信息向第一访问接入点200-1传输的指令。
61.参照图7,车辆控制装置100若掌握与第一访问接入点200-1的连接产生问题,则搜索与第一访问接入点200-1相邻车辆中的可使用的车辆(闲置车辆)。例如,车辆控制装置100可以作为可使用的车辆,选择第二车辆300-2。
62.车辆控制装置100可以通过接通有第二车辆300-2的第二访问接入点200-2将要向第一车辆300-1传输的信息(第一信息)向第二车辆300-2传输。另外,车辆控制装置100可以包括指示向第二车辆(200-2)传输第一访问接入点200-1的覆盖范围(无法通信区域)的位置以及将第一信息向第一访问接入点200-1传输的指令。
63.参照图8,第二车辆300-2进入第一访问接入点200-1的覆盖范围而与第一访问接入点200-1无线接通。然后,第二车辆300-2将从车辆控制装置100接收的第一信息向第一访问接入点200-1传输,并请求第一访问接入点200-1传播第一信息。第一访问接入点200-1将第一信息向位于第一访问接入点200-1的覆盖范围的车辆传播。第一车辆300-1确认包括在第一信息中的识别信息,确认包括在第一信息中的目标移动位置以及作业来移动。
64.于是,即使在第一访问接入点200-1和车辆控制装置100之间被切断连接的情况下,车辆控制装置100也能够向与无法通信的第一访问接入点200-1无线接通中的第一车辆300-1传输信息。
65.图9是用于从车辆控制装置向与无法通信状态的访问接入点接通的车辆传输信息的发信号流程图。参照图9,在车辆控制装置100和第一访问接入点200-1之间的连接中产生问题,成为第一车辆控制装置100和第一访问接入点200-1没有连接的状态。与第一访问接入点200-1接通中的第一车辆300-1若掌握无法与车辆控制装置100进行通信,则在当前位置或者整修位置停车并待机(s905)。
66.车辆控制装置100在与制造工厂内各车辆执行无线通信的访问接入点200中确认无法与车辆控制装置100进行通信的第一访问接入点200-1(s910)。
67.车辆控制装置100确认位于与第一访问接入点200-1的覆盖范围对应的无法通信区域的第一车辆300-1,并通过第二访问接入点200-2传输要向第二车辆300-2传递的第一车辆300-1的第一信息以及指示第二车辆300-2向无法通信区域行驶的第二信息(s925、s930)。
68.第二车辆300-2向第一访问接入点200-1的覆盖范围移动(s930),向第一访问接入点200-1传递第一信息(s935)。第一访问接入点200-1将第一信息向接通中的车辆(第一车辆300-1以及第二车辆300-2)以传播方式传输。第一车辆300-1接收第一信息,确认包括在第一信息中的识别信息并根据包括在第一信息中的指令(移动位置、作业)移动。访问接入点200的传播信息可以基于udp(user datagram procotol;用户数据报协议)生成。
69.图10是当从车辆控制装置100向与无法通信状态的访问接入点接通的车辆传输信息时与车辆控制装置的工作有关的流程图。图10可以通过车辆控制装置100来执行。
70.根据本发明的实施例,车辆控制装置100在与制造工厂内各车辆执行无线通信的访问接入点中确认无法与车辆控制装置100进行通信的第一访问接入点200-1(s1005)。例如,车辆控制装置100若掌握在与第一访问接入点200-1的连接中产生问题,则搜索与第一访问接入点200-1相邻的车辆中的可使用的车辆(闲置车辆)。例如,可以是,车辆控制装置100作为可使用的车辆而选择第二车辆300-2,第二车辆300-2确认无线接通中的第二访问接入点200-2。
71.车辆控制装置100确认位于与第一访问接入点200-1的覆盖范围对应的无法通信区域的第一车辆300-1(s1010)。车辆控制装置100可以向与第二访问接入点200-2接通中的第二车辆300-2,传输要向第一车辆300-1传递的第一信息以及指示第二车辆300-2向无法通信区域行驶的第二信息(s1015)。
72.图11是当从车辆控制装置向与无法通信的状态的访问接入点(第一访问接入点200-1)接通的车辆传输信息时与接收信息的车辆(第一车辆300-1)的工作有关的流程图。
73.在车辆控制装置100和第一访问接入点200-1之间的连接中产生问题,成为第一车辆控制装置100和第一访问接入点200-1没有连接的状态。与第一访问接入点200-1接通中的第一车辆300-1确认无法与车辆控制装置100进行通信(s1105),在当前位置或者整修位置停车并待机(s1110)。
74.之后,车辆控制装置100向第二车辆300-2传输要向第一车辆300-1传递的第一信息并指示进入第一访问接入点200-1的覆盖范围。第一车辆300-1接收从第一访问接入点200-1传播的第一信息(s1115),确认包括在第一信息中的识别信息而根据包括在第一信息中的指令(移动位置、作业)移动(s1120)。
75.图12是当从车辆控制装置100向与无法通信的状态的访问接入点(第一访问接入点200-1)接通的车辆传输信息时与传递信息的车辆(第二车辆300-2)的工作有关的流程图。
76.如上所述,车辆控制装置100在与制造工厂内各车辆执行无线通信的访问接入点200中确认无法与车辆控制装置100进行通信的第一访问接入点200-1。车辆控制装置100通过第二访问接入点200-2向第二车辆300-2传输要向第一车辆300-1传递的第一信息以及指示第二车辆300-2向无法通信区域行驶的第二信息。
77.第二车辆300-2从车辆控制装置100通过第二访问接入点200-2接收第一信息以及第二信息(s1205),向第一访问接入点200-1的覆盖范围移动(s1210),向第一访问接入点200-1传递第一信息(s1215)。
78.图13以及图14示出用于与车辆控制装置无法通信状态的访问接入点(第一访问接入点200-1)接通的车辆(第一车辆300-1)向车辆控制装置100传输信息的方法的例子。如图13以及图14那样,当接收车辆控制装置100的信息的第一车辆300-1传输响应信息时,从第一车辆300-1向车辆控制装置100的信息传输可以执行。另外,也可以当由第一车辆300-1先掌握在第一访问接入点200-1和车辆控制装置100之间的连接中存在问题时执行。
79.参照图13,第一车辆300-1向第一访问接入点200-1传输要向车辆控制装置100传输的信息,在此,可以请求与信息的传输一起传播相应信息。另外,相应信息可以包括使得接收的车辆通过其它访问接入点向车辆控制装置100进行传输的指令。从第一车辆300-1接收信息的第一访问接入点200-1将信息向接通的车辆传输。在第一访问接入点200-1的覆盖
范围中移动中的第三车辆300-3从第一访问接入点200-1接收信息并存储。
80.参照图14,第三车辆300-3可以进入第三访问接入点200-3的覆盖范围而与第三访问接入点200-3无线接通。第三车辆300-3可以通过第三访问接入点200-3将从第一车辆300-1接收的信息向车辆控制装置100传递。
81.于是,即使在第一访问接入点200-1和车辆控制装置100之间被切断连接的情况下,与无法通信的第一访问接入点200-1无线接通中的第一车辆300-1也能够向车辆控制装置100传输信息。
82.图15是用于与车辆控制装置和无法通信状态的访问接入点接通的车辆向车辆控制装置传输信息的发信号流程图。
83.参照图15,在车辆控制装置100和第一访问接入点200-1之间的连接中产生问题,成为第一车辆控制装置100和访问接入点200-1没有连接的状态。与第一访问接入点200-1接通中的第一车辆300-1若掌握无法与车辆控制装置100进行通信,则在当前位置或者整修位置停车并待机(s1505)。
84.第一车辆300-1将向车辆控制装置100传输所需的信息向第一访问接入点200-1传输(s1510)。在此,可以请求第一车辆300-1将相应信息与信息传输一起传播。另外,相应信息可以包括使得接收的车辆通过其它访问接入点向车辆控制装置100传输的指令。在一实施例中,第一车辆300-1可以向第一访问接入点200-1传输与车辆控制装置100有关的移动请求信息。可以是,从第一车辆300-1接收信息的第一访问接入点200-1将信息向接通的车辆以传播方式传输,进入第一访问接入点200-1的覆盖范围中的第三车辆300-3从第一访问接入点200-1接收信息(s1515、s1520)。第三车辆300-3存储从第一访问接入点200-1接收的信息(移动请求信息)。
85.之后,第三车辆300-3进入能够与车辆控制装置100进行通信的第三访问接入点200-3的覆盖范围(s1525),向第三访问接入点200-3传输移动请求信息(s1530)。第三访问接入点200-3将从第三车辆300-3接收的移动请求信息向车辆控制装置100传输(s1535)。车辆控制装置100可以从第三访问接入点200-3接收移动请求信息,生成并传输与第一车辆300-1有关的控制信息(s1540)。
86.图16是当与无法通信状态的访问接入点(第一访问接入点200-1)接通的车辆300-1向车辆控制装置100传输信息时与车辆控制装置100的工作有关的流程图。在车辆控制装置100和第一访问接入点200-1之间的连接中产生问题,成为第一车辆控制装置100与访问接入点200-1没有连接的状态。此时,第一车辆300-1可以通过其它车辆(第三车辆300-3)向车辆控制装置100传输移动请求信息。
87.可以是,车辆控制装置100从接通有第三车辆300-3的第三访问接入点200-3接收移动请求信息(s1605),传输与第一车辆300-1有关的控制信息(s1610)。与第一车辆300-1有关的控制信息可以是指示第一车辆300-1离开无法通信区域或进行其它作业的信息。
88.图17是当与无法通信状态的访问接入点(第一访问接入点200-1)接通的车辆(第一车辆300-1)向车辆控制装置100传输信息时与传输信息的车辆(第一车辆300-1)的工作有关的流程图。
89.在车辆控制装置100和第一访问接入点200-1之间的连接中产生问题,成为第一车辆控制装置100和访问接入点200-1没有连接的状态。与第一访问接入点200-1接通中的第
一车辆300-1确认无法与车辆控制装置100进行通信(s1705),在当前位置或者整修位置停车并待机(s1710)。
90.然后,第一车辆300-1向第一访问接入点200-1传输与车辆控制装置100有关的移动请求信息(s1715)。第一车辆300-1可以与请求向第一访问接入点200-1传播移动请求信息的信息一起,附加请求接收移动请求信息的车辆通过其它访问接入点向车辆控制装置100传递相应信息的信息。
91.图18是当与无法通信状态的访问接入点(第一访问接入点200-1)接通的车辆(第一车辆300-1)向车辆控制装置100传输信息时与传递信息的车辆(第三车辆300-3)的工作有关的流程图。
92.第三车辆300-3进入第一访问接入点200-1的覆盖范围(s1805),从第一访问接入点200-1接收通过第一车辆300-1生成的移动请求信息(s1810)。第三车辆300-3进入能够通信的第三访问接入点200-3的覆盖范围(s1815),向第三访问接入点(200-)传输所述移动请求信息(s1820)。第三访问接入点200-3可以向车辆控制装置100传递移动请求信息。
93.上述的实施例假设了车辆与访问接入点进行无线通信的情况,但是当能够进行车辆之间通信时(例如:lte(long term evolution;长期演进)、d2d(device-to-device;设备到设备)通信),也可以通过车辆之间的通信向车辆控制装置100传输信息或从车辆控制装置100接收信息。
94.另外,适用本发明的处理方法可以以由计算机执行的程序形态生产,并可以存储于计算机可读的记录介质。具有根据本发明的数据结构的多媒体数据也仍可以存储于计算机可读的记录介质。所述计算机可读的记录介质包括存储用计算机可读取的数据的所有种类的存储装置以及分布式存储装置。所述计算机可读的记录介质例如可以包括蓝光光盘(bd)、通用串行总线(usb)、rom、prom、eprom、eeprom、ram、cd-rom、磁带、软盘以及光学数据存储装置。另外,所述计算机可读的记录介质包括实现为载波(例如,通过互联网的传输)形态的媒体。另外,通过编码方法生成的比特流可以存储于计算机可读的记录介质或通过有线/无线通信网络传输。
95.另外,本发明的实施例可以实现为基于程序代码的计算机程序产品,所述程序代码可以通过本发明的实施例在计算机中执行。所述程序代码可以存储于计算机可读的载体中。
96.根据本发明的实施例的非暂时且计算机可读的媒介(non-transitory computer-readable medium)存储通过一个或者其以上的处理器执行的一个或者其以上的命令语言。上述的根据本发明的实施例的用于执行用于检查液滴(d)的方法的命令语言可以存储于非暂时且计算机可读的媒介。
97.本实施例以及本说明书中所附的附图只不过明确表示包括在本发明中的技术构思的一部分,显而易见由本领域技术人员能够在包括在本发明的说明书以及附图中的技术构思的范围内容易导出的变形例和具体实施例均包括在本发明的权利范围中。
98.因此,本发明的构思不应局限于所说明的实施例,不仅是所附的权利要求书,与其权利要求书等同或等价变形的所有构思属于本发明构思的范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。