1.本实用新型属于水利水电工程技术领域,尤其是涉及一种水下长距离隧洞信号局域传输系统。
背景技术:
2.众所周知,水利、水电工程在我国得到了广泛的开发及应用,其中水电站作为开发清洁能源的主要水工建筑物,是通过引水隧洞输水至水轮机带动发电机转动而产生电能。水力发电过程中引水隧洞的输水作用至关重要,隧洞结构的性能好坏关系到管道输水压力以及输水过程的安全性。随着已完建水电站的长期投入使用,对于隧洞结构的内部检查和评价已作为不可或缺的内容。针对水下隧洞的检测方案主要分为两种:其中一种是将隧洞里的水放空,然后人工进入洞内检测;另一种是在隧洞有水情况下,潜水员或水下机器人进行水下检测。第一种隧洞内水放空检测的方法,因为其放空时间较长,对水电站的运行不仅造成调度困难,而且直接影响到发电经济损失。目前常用的方法是第二种潜水员或水下机器人在有水条件下检测,短距离水工隧洞的检测中,采用潜水员检测能够得到较好的效果,但是对于长距离隧洞的检测,潜水员水下作业功效较低,并且隧洞属于狭小空间,潜水员发生紧急情况下的逃生、急救措施无法保障,存在较大的安全风险。随着水下机器人科技的进步与发展,在水下隧洞的检测中逐渐得到应用和推广。
3.目前水下机器人检测主要分为带缆(rov,多为铠装电缆)和不带缆(auv)作业,在国内rov进行水下隧洞检测应用越来越多,但是,针对长距离引水隧洞检测国内开展作业案例较少。其主要原因在于长距离隧洞检测有以下限制条件:1、在rov检测中,需要根据距离进行拖缆作业,隧洞距离越长,缆绳需要越长,对脐带缆本身、盘缆及拖缆要求越高;2、脐带缆越长,rov运行中的压降和能耗越大,长距离隧洞无法满足其动力需求。
4.因此,对于不带缆水下机器人(auv)的开发、研究逐渐得到众多学者和专家的重视。不带缆水下机器人脱离了脐带缆的负重,作业能力范围得到很大的改善,但最大的问题是不能实现精细定点检测和作业,主要在于水下隧洞距离较长,信号传输较弱或丢失,不能够及时地与支持母船进行沟通实时传输数据信息,操控技术人员无法及时做出预判,有可能造成水下机器人信号脱离连接而出现机器设备丢失,不仅造成设备经济的损失而且对隧洞结构的安全造成一定的隐患。因此,迫切需要一种水下长距离隧洞信号局域传输布置结构,能够保证水下机器人数据传输的安全稳定运行,为水下隧洞的检测和修复提供支持和保障。
技术实现要素:
5.本实用新型的目的在于,针对现有技术中存在的不足,提供一种水下长距离隧洞信号局域传输系统。
6.为此,本实用新型的上述目的通过以下技术方案实现:
7.一种水下长距离隧洞信号局域传输系统,其特征在于:所述水下长距离隧洞信号
局域传输系统包括auv本体、多个信号传输载体、信号传输母体、水上控制平台和工作船;所述水上控制平台设置在工作船上,所述信号传输母体与水上控制平台经脐带缆线连接;所述auv本体具有机械爪,且用于携带信号传输载体至水下隧洞内,所述信号传输载体依次间隔布置至水下隧洞的延伸方向上;所述auv本体、信号传输载体和信号传输母体均设有信号接收模块和信号发射模块;所述auv本体为不带缆水下机器人,所述信号传输母体为带缆水下机器人。
8.在采用上述技术方案的同时,本实用新型还可以采用或者组合采用如下技术方案:
9.作为本实用新型的优选技术方案:所述信号传输载体的重力小于其浮力。
10.作为本实用新型的优选技术方案:所述信号传输载体的顶部设有摩擦器。
11.作为本实用新型的优选技术方案:所述auv本体安装有水下摄像头和声呐设备,还设有框架、云台、浮力块、推进器以及电子舱,所述电子舱与水下摄像头、声呐设备、推进器通过封闭防水缆线电连接。
12.作为本实用新型的优选技术方案:所述auv本体和信号传输载体上设有密封式供电电源。
13.作为本实用新型的优选技术方案:所述信号传输载体上具有扣环,所述扣环用于被auv本体的机械爪所扣住。
14.本实用新型提供一种水下长距离隧洞信号局域传输系统,通过在水下隧洞内间隔一定距离布置信号传输载体,提高了auv本体在水下作业的信号传输能力;信号传输载体在水中的重力略小于浮力,可以利用轻微浮力将该信号传输载体靠紧水下隧洞的顶部,并通过顶部的摩擦器依附于水下隧洞的顶部,增大信号传输载体位置的稳定性,减小水流波动引起的干扰;此外,通过auv本体上的机械手释放或者抓取信号传输载体上的扣环,能够实现对信号传输载体的收放自如;本实用新型通过信号传输母体在水下隧洞的洞口收集汇总并向水上控制平台发送信号,能够及时地实现人机交互能力。
附图说明
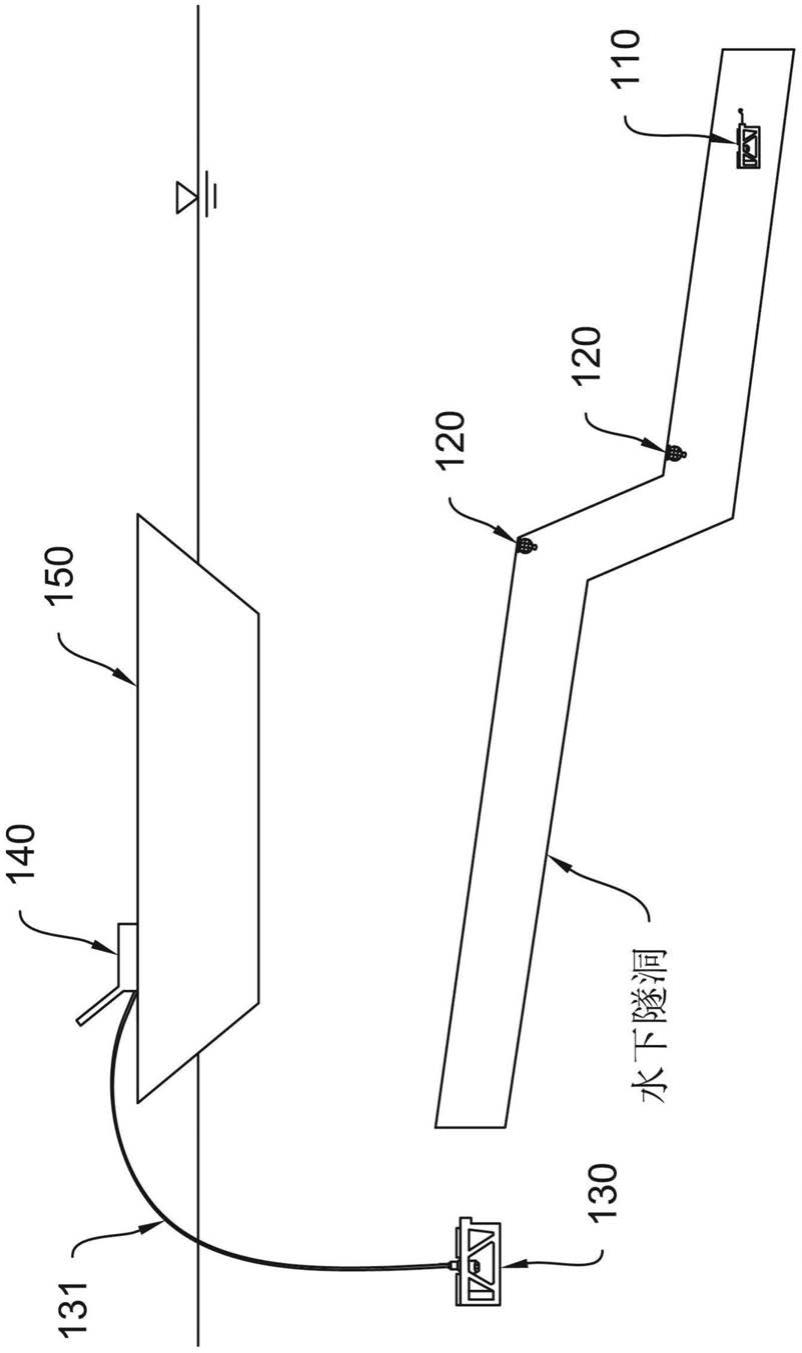
15.图1为本实用新型所提供的水下长距离隧洞信号局域传输系统的结构图。
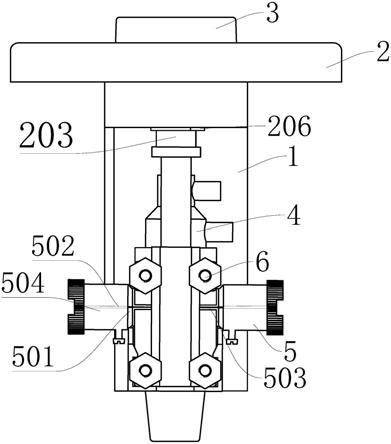
16.图2为信号传输载体的结构图。
17.图3为auv本体的结构图。
具体实施方式
18.参照附图和具体实施例对本实用新型作进一步详细地描述。
19.参照图1-3所示,一种水下长距离隧洞信号局域传输系统,包括auv本体110,auv本体110通过自身的机械爪111来固定信号传输载体120底部的扣环121,信号传输载体120顶部设有摩擦器122,信号传输载体120通过发射与接收信号同信号传输母体130连接,信号传输母体130通过脐带缆131与水上控制平台140连接,水上控制平台140安装于工作船150内;auv本体110、信号传输载体120上设有密封式供电电源,auv本体110、信号传输载体120、信号传输母体130上设有信号接收和发射模块。信号传输载体120结构在水中的重力略小于浮力。
20.auv本体110为不带缆水下机器人,信号传输母体130为带缆水下机器人。
21.auv本体110安装有水下摄像头和声呐设备,还设有框架、云台、浮力块、推进器以及电子舱,电子舱与水下摄像头、声呐设备、推进器通过封闭防水缆线电连接。
22.本实用新型所提供的水下长距离隧洞信号局域传输系统通过如下方式工作:
23.信号传输母体130下潜至水下隧洞口位置后,采用水下机器人auv本体110通过机械爪111携带多个信号传输载体120进入水下隧洞内,每前进间隔一定距离释放一个信号传输载体120。信号传输载体120凭借在水中的浮力上升至水下隧洞顶部,并通过摩擦器122吸附于水下隧洞的洞壁上,按照释放顺序对信号传输载体120依次编号为a1、a2、a3
……
an,当auv本体110到达指定位置时,a1~an信号传输载体120通过发射信号形成局域网与信号传输母体130进行数据传输。工作船150上的控制平台通过局域网实时对auv本体110发出指令和接收反馈信息以控制auv本体110执行作业。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种水下长距离隧洞信号局域传输系统,其特征在于:所述水下长距离隧洞信号局域传输系统包括auv本体、多个信号传输载体、信号传输母体、水上控制平台和工作船;所述水上控制平台设置在工作船上,所述信号传输母体与水上控制平台经脐带缆线连接;所述auv本体具有机械爪,且用于携带信号传输载体至水下隧洞内,所述信号传输载体依次间隔布置至水下隧洞的延伸方向上;所述auv本体、信号传输载体和信号传输母体均设有信号接收模块和信号发射模块;所述auv本体为不带缆水下机器人,所述信号传输母体为带缆水下机器人。2.根据权利要求1所述的水下长距离隧洞信号局域传输系统,其特征在于:所述信号传输载体的重力小于其浮力。3.根据权利要求1或2所述的水下长距离隧洞信号局域传输系统,其特征在于:所述信号传输载体的顶部设有摩擦器。4.根据权利要求1所述的水下长距离隧洞信号局域传输系统,其特征在于:所述auv本体安装有水下摄像头和声呐设备,还设有框架、云台、浮力块、推进器以及电子舱,所述电子舱与水下摄像头、声呐设备、推进器通过封闭防水缆线电连接。5.根据权利要求1所述的水下长距离隧洞信号局域传输系统,其特征在于:所述auv本体和信号传输载体上设有密封式供电电源。6.根据权利要求1所述的水下长距离隧洞信号局域传输系统,其特征在于:所述信号传输载体上具有扣环,所述扣环用于被auv本体的机械爪所扣住。
技术总结
本实用新型提供一种水下长距离隧洞信号局域传输系统,包括AUV本体、多个信号传输载体、信号传输母体、水上控制平台和工作船;所述水上控制平台设置在工作船上,所述信号传输母体与水上控制平台经脐带缆线连接;所述AUV本体具有机械爪,且用于携带信号传输载体至水下隧洞内,所述信号传输载体依次间隔布置至水下隧洞的延伸方向上;所述AUV本体、信号传输载体和信号传输母体均设有信号接收模块和信号发射模块;所述AUV本体为不带缆水下机器人,所述信号传输母体为带缆水下机器人。本实用新型通过在水下隧洞内间隔一定距离布置信号传输载体,提高了AUV本体在水下作业的信号传输能力。提高了AUV本体在水下作业的信号传输能力。提高了AUV本体在水下作业的信号传输能力。
技术研发人员:程庆超 戴杨春 余勋 陈乔 王林林 吴启民 赵沈军 姚鑫晨 马德莲 王丽娟 胡登宇
受保护的技术使用者:浙江华东建设工程有限公司
技术研发日:2021.06.28
技术公布日:2022/2/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。