技术特征:
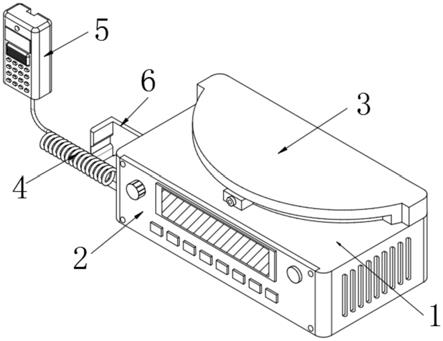
1.一种移动投影机器人,其特征在于,包括:无人机,用于采集环境图像信息,建立与承载台的通信连接,将采集到的环境图像信息发送至所述承载台,以及,接收承载台发送的投影内容,并将接收到的投影内容投影到目标投影区域;承载台,用于接收环境图像信息并根据环境图像信息确定对应的环境信息,生成移动策略,接收用户端发送的投影内容,承载所述无人机,并为移动模块提供动力;移动模块,用于根据移动策略采取不同的移动方式进行移动。2.根据权利要求1所述的移动投影机器人,其特征在于,所述承载台还用于周期性的为所述无人机进行充电。3.根据权利要求2所述的移动投影机器人,其特征在于,所述移动模块包括履带移动部、肢足移动部、滚轮移动部,以及气囊涡轮移动部。4.一种应用于权利要求1所述的移动投影机器人的移动投影方法,其特征在于,包括:无人机按照预设轨迹采集环境图像信息,将采集到的环境图像信息发送至承载台;承载台接收无人机采集的环境图像信息,对所述环境图像信息进行分析,确定对应的环境信息,根据所述环境信息生成对应的移动策略,将所述移动策略发送至移动模块;移动模块根据所述移动策略选取对应的移动部进行移动,在移动至目标区域后,无人机接收承载台发送的投影内容,将投影内容投影到目标投影区域。5.根据权利要求4所述的移动投影方法,其特征在于,所述承载台接收无人机采集的环境图像信息,对所述环境图像信息进行分析,确定对应的环境信息,包括:所述承载台接收无人机采集的环境图像信息,对所述环境图像信息进行识别,确定目标区域,根据所述目标区域规划移动路径,根据所述移动路径上的路况信息确定不同路段对应的路况信息。6.根据权利要求5所述的移动投影方法,其特征在于,所述根据所述环境信息生成对应的移动策略,将所述移动策略发送至移动模块,包括:根据移动路径确定对应的移动方向,根据移动路径上的路况信息确定不同路段对应的路况信息,根据路况信息确定对应的移动部,将移动方向和针对不同路段选用移动部的信息发送至移动模块。7.根据权利要求6所述的移动投影方法,其特征在于,还包括:在移动投影机器人移动至目标区域后,承载台根据无人机采集的环境图像信息确定目标投影区域和无人机的落点,生成落点坐标信息,并将落点坐标信息发送至无人机。8.根据权利要求7所述的移动投影方法,其特征在于,还包括:无人机移动至第一落点坐标,采集目标投影区域的第一图像信息,并将采集到的目标投影区域的第一图像信息发送至承载台;承载台根据第一图像信息确定是否存在投影遮挡物,响应于存在投影遮挡物,根据无人机采集到的目标投影区域的图像信息重新为无人机确定第二落点坐标。9.根据权利要求8所述的移动投影方法,其特征在于,还包括:无人机移动至第二落点坐标,将投影内容投影到目标投影区域,采集目标投影区域的第二图像信息并发送至承载台,承载台根据第二图像信息中投影内容的亮度和清晰度确定无人机的投影角度的调整值。
10.根据权利要求9所述的移动投影方法,其特征在于,还包括:无人机根据投影角度的调整值对投影角度进行调整。
技术总结
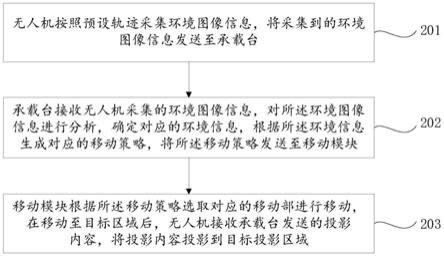
本公开实施例提供一种移动投影机器人及其投影方法,所述方法包括:无人机按照预设轨迹采集环境图像信息,将采集到的环境图像信息发送至承载台;承载台接收无人机采集的环境图像信息,对所述环境图像信息进行分析,确定对应的环境信息,根据所述环境信息生成对应的移动策略,将所述移动策略发送至移动模块;移动模块根据所述移动策略选取对应的移动部进行移动,在移动至目标区域后,无人机接收承载台发送的投影内容,将投影内容投影到目标投影区域。以此方式,在保证用户安全的同时,能够保证投影时长和投影稳定性,从而提高用户体验。从而提高用户体验。从而提高用户体验。
技术研发人员:王红光
受保护的技术使用者:北京萌特博智能机器人科技有限公司
技术研发日:2021.11.09
技术公布日:2022/1/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。