技术特征:
1.一种制造可磁驱动的微型机器人的方法,所述方法包括以下步骤:对光固化材料组合物进行光固化以形成所述可磁驱动的微型机器人的主体;其中,所述光固化材料组合物包括:可降解组分;结构性组分;磁性组分;以及包括光引发剂组分和光敏剂组分的光固化促进组合物。2.根据权利要求1所述的方法,其中,所述可降解组分包括聚(乙二醇)二丙烯酸酯(pegda)或类似的聚(乙二醇)(peg)衍生物。3.根据权利要求1所述的方法,其中,所述结构性组分包括季戊四醇三丙烯酸酯(peta)。4.根据权利要求1所述的方法,其中,所述磁性组分包括fe3o4颗粒。5.根据权利要求4所述的方法,其中,所述fe3o4颗粒包括fe3o4纳米颗粒。6.根据权利要求1所述的方法,其中,所述光固化是使用光刻法选择性地执行的。7.根据权利要求6所述的方法,其中,所述光固化是使用3d激光光刻法或多光子光刻法选择性地执行的。8.根据权利要求1所述的方法,所述方法还包括以下步骤:在所述主体的至少一部分上涂覆或涂敷光声成像造影剂形成涂层。9.根据权利要求8所述的方法,其中,所述造影剂包括金。10.根据权利要求1所述的方法,所述方法还包括以下步骤:通过以下步骤形成所述光固化材料组合物:基于第一比例混合所述可降解组分和所述结构性组分以形成第一混合物,以及基于第二比例将所述第一混合物与所述磁性组分混合以形成第二混合物。11.根据权利要求10所述的方法,所述方法还包括以下步骤:在形成所述光固化材料组合物之前确定所述光固化材料组合物的组成。12.根据权利要求11所述的方法,其中,确定所述光固化材料组合物的组成的步骤包括确定所述第一比例和所述第二比例。13.根据权利要求1所述的方法,所述方法还包括以下步骤:在所述光固化之前混合所述光固化材料组合物。14.根据权利要求1所述的方法,所述方法还包括以下步骤:在所述光固化之前显影形成的所述主体。15.根据权利要求1所述的方法,其中,所述主体包括具有三维结构的多孔主体,所述三维结构具有毛刺构件。16.根据权利要求1所述的方法,其中,所述可降解组分包括聚(乙二醇)二丙烯酸酯(pegda),所述结构性组分包括季戊四醇三丙烯酸酯(peta);并且其中,聚(乙二醇)二丙烯酸酯的vol%与季戊四醇三丙烯酸酯的vol%的比为3:1。17.根据权利要求1所述的方法,其中,所述光固化材料组合物的光固化形成多个可磁驱动微型机器人的主体。18.根据权利要求17所述的方法,其中,相邻的主体是重叠的。
19.根据权利要求18所述的方法,其中,所述重叠的相邻主体是机械接合的。20.根据权利要求19所述的方法,其中,所述重叠的相邻主体是在没有直接材料连接的情况下机械接合的。21.根据权利要求1所述的方法,所述方法还包括以下步骤:将细胞附着或加载至所述主体。22.根据权利要求8所述的方法,所述方法还包括以下步骤:将细胞附着或加载至所述涂层。23.一种可磁驱动的微型机器人,所述可磁驱动的微型机器人包括:通过对光固化材料组合物进行光固化而制造的主体,所述光固化材料组合物包括:可降解组分;结构性组分;磁性组分;以及包括光引发剂组分和光敏剂组分的光固化促进组合物。24.根据权利要求23所述可磁驱动的微型机器人,所述可磁驱动的微型机器人还包括造影剂材料或涂层,所述造影剂材料或涂层被设置在所述主体的至少一部分上。
技术总结
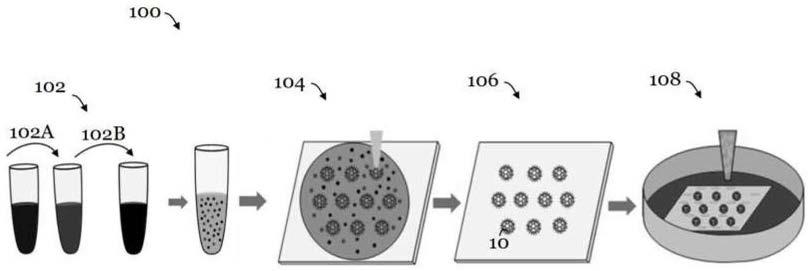
本发明提供一种可磁驱动的微型机器人及其制造方法,用于承载和递送细胞,所述方法包括以下步骤:对光固化材料组合物进行光固化以形成可磁驱动微型机器人的主体。光固化材料组合物包括:可降解组分、结构性组分、磁性组分以及包括光引发剂组分和光敏剂组分的光固化促进组合物。进组合物。进组合物。
技术研发人员:孙东 魏坦勇 王立代 李东方 张雅超 陈书勋
受保护的技术使用者:香港城市大学
技术研发日:2021.07.20
技术公布日:2022/1/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。