技术特征:
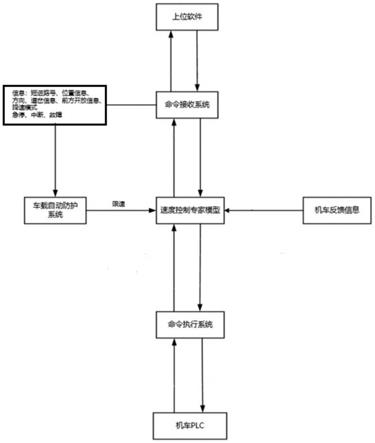
1.一种厂区机车无人驾驶的控制方法,其特征在于,包括步骤:中央控制系统发出行车指令至机车plc系统;机车plc系统控制机车执行行车指令,机车以不超过最大速度的行车速度行驶;当发生紧急制动条件时,机车执行紧急制动指令。2.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,所述行车指令由中央控制系统通过无线通信发送至设于机车上的机车plc系统,机车plc系统控制设于机车上的车载自动驾驶装置执行行车指令,而设于机车上的车载监控装置实时监控车载自动驾驶装置的行车情况;当所述车载监督系统判断车载自动驾驶装置发生紧急制动条件时,所述车载监督系统发生紧急制动指令至机车plc系统,同时发生反馈信号至中央控制系统,机车plc系统收到紧急制动指令后控制车载自动驾驶装置紧急制动。3.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,所述行车速度受下述条件的至少其中之一约束:进路系统上传的安全进路距离信息、制动压力信息、机车档位信息、机车编组形式以及机车挂载混铁车重量。4.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,所述最大速度受下述条件的至少其中之一约束:区段永久限速;区段临时限速;使机车在移动授权限制内安全停车的最大速度,或在进入某区段时,使机车减速至该区段永久/临时限速的最大速度。5.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,紧急制动条件包括下列条件的至少其中之一:运行中的机车完整性丢失;出现致命故障;与中央控制系统的通信持续丢失10秒以上;机车进入锁闭进路;机车接近联锁时,道岔失表或道岔位置错误;运行中的机车距离轨道终点过近;运行中的机车距离轨道障碍物过近;运行中的机车距离另一列机车过近;接收到中央控制系统发出的紧急制动指令。6.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,紧急制动指令控制阀门时,根据下列条件的至少其中之一进行控制:机车的定位信息、编组类型、当前车速信息、刹车距离信息及专家库。7.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,还包括步骤:当发生紧急缓解指令后,机车解除紧急制动指令。8.根据权利要求1所述的厂区机车无人驾驶的控制方法,其特征在于,当发生下述条件的其中之一时,发出紧急缓解指令:触发紧急制动的因素消失;接收到中央控制系统的缓解指令;人工手动解除指令。9.一种基于如权利要求1-8中任意一项所述的厂区机车无人驾驶的控制方法而实施的
系统,其特征在于,其包括:中央控制系统;机车,所述机车包括车载自动驾驶装置以及与车载自动驾驶装置连接的机车plc系统以及车载监督系统;其中,所述机车plc系统以及车载监督系统与中央控制系统无线通信连接;当机车接受来自中央控制系统发出的行车指令时,以不超过最大速度的行车速度行驶;当发生紧急制动条件时,机车执行紧急制动指令。10.根据权利要求9所述的系统,其特征在于,所述车载自动驾驶装置采用模糊控制模型。
技术总结
本发明公开一种厂区机车无人驾驶的控制方法,其包括步骤:中央控制系统发出行车指令至机车PLC系统;机车PLC系统控制机车执行行车指令,机车以不超过最大速度的行车速度行驶;当发生紧急制动条件时,机车执行紧急制动指令。此外,本发明还公开了一种基于上述的厂区机车无人驾驶的控制方法而实施的系统,其包括:中央控制系统;机车,其包括车载自动驾驶装置以及与车载自动驾驶装置连接的机车PLC系统以及车载监督系统;其中,所述机车PLC系统以及车载监督系统与中央控制系统无线通信连接。该控制方法通过对厂区尤其是钢铁厂区的无人驾驶的机车设置行车速度并且在必要时设置紧急制动条件,从而保证了安全并同时兼顾了生产效率。率。率。
技术研发人员:葛鑫 吴娟 蔡春雷 胡云 吴泾 汪侃 陈胜 刘一江
受保护的技术使用者:上海宝信软件股份有限公司
技术研发日:2020.07.22
技术公布日:2022/1/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。