1.本实用新型涉及自动驾驶技术领域,具体为一种自动驾驶汽车用激光测距装置。
背景技术:
2.自动驾驶系统是指列车驾驶员执行的工作完全自动化的、高度集中控制的列车运行系统,自动驾驶系统具备列车自动唤醒启动和休眠、自动出入停车场、自动清洗、自动行驶、自动停车、自动开关车门、故障自动恢复等功能,并具有常规运行、降级运行、运行中断等多种运行模式。实现全自动运营可以节省能源,优化系统能耗和速度的合理匹配,自动驾驶系统要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平.20世纪90年代以来,随着通信、控制和网络技术的发展,可以在地车之间实现大容量、双向的信息传输,为高密度、大运量的地铁系统成为真正意义上的自动驾驶系统提供了可能;
3.现有技术中,自动驾驶汽车大多数都是通过激光测距的方式,来对障碍物进行躲避,但是现有的激光装置大多数都是位于汽车的前方位置,汽车移动的时候,容易促使激光装置遭到破坏,激光的位置总是固定不变的,这样就会促使装置存在一定的局限性。
技术实现要素:
4.本实用新型的目的在于提供了一种自动驾驶汽车用激光测距装置,达到解决上述背景技术中提出问题的目的。
5.为实现上述目的,本实用新型提供如下技术方案:一种自动驾驶汽车用激光测距装置,包括底盘,所述底盘的顶部安装有矩形仓,所述矩形仓的内壁设置有调节机构,所述调节机构包括挡板、第一连接块、连接杆、第二连接块、支撑杆、限位块、托板、弹簧和提升杆;
6.所述挡板的数量有两个,两个所述挡板安装在矩形仓的内壁,所述弹簧的一端与挡板的内壁相连接,所述第一连接块安装在矩形仓的内侧底部,所述弹簧的另一端与第一连接块的侧壁相连接,所述连接杆的一端与第一连接块的内壁相连接,所述第二连接块与连接杆的另一端相连接,所述支撑杆安装在矩形仓的内壁,所述限位块安装在支撑杆的另一端,所述提升杆安装在限位块的内壁,所述托板安装在提升杆的顶部,所述第二连接块的侧壁与提升杆的侧壁固定连接。
7.优选的,所述底盘的底部固定安装有滑轮,所述滑轮的数量有四个,四个所述滑轮的形状大小均相等,四个所述滑轮分别固定安装在底盘的底部四角位置。
8.优选的,所述底盘的上表面固定安装有车身,所述车身的顶部固定安装有盖板。
9.优选的,所述车身的表面固定安装有固定轴,所述固定轴的侧壁活动安装有活动门,所述活动门的数量有两个,两个所述活动门的表面均活动安装有把手。
10.优选的,所述矩形仓的内壁设置有转动机构,所述转动机构包括平行板、长绳、稳定块、转动块、转轴、电机和凹槽。
11.优选的,所述凹槽开设在矩形仓的内壁,所述电机固定安装在凹槽的内壁,所述转
轴的底部安装在电机的输出端,所述平行板固定安装在转轴的另一端,所述转动块固定安装在平行板的顶部,所述长绳的一端与转动块的表面固定连接,所述稳定块的数量有两哥,两个所述稳定块固定安装在电机的两侧。
12.本实用新型提供了一种自动驾驶汽车用激光测距装置。具备以下有益效果:
13.(1)、本实用新型通过第一连接块的拉动,拉动的时候,在连接杆的作用下,促使第二连接块的位置进行上升,第二连接块还会进一步带动提升杆的位置进行上升,限位块可以有效的限制提升杆的位置,提升杆的顶部还会带动托板的位置进行上升,进一步穿过连接孔的内壁,达到了提升杆上下移动的时候,就可以确定激光测距装置位置的目的,解决了现有技术中,自动驾驶汽车大多数都是通过激光测距的方式,来对障碍物进行躲避,但是现有的激光装置大多数都是位于汽车的前方位置,汽车移动的时候,容易促使激光装置遭到破坏,激光的位置总是固定不变的,这样就会促使装置存在一定的局限性。
14.(2)、本实用新型通过开启电机,电机开启的时候,就会通过输出端的转轴带动平行板和转动块一起进行转动,长绳就会缠绕在转动块的表面,此时长绳的另一端就会对第一连接块进行拉动,达到了减少人力物力的目的,可以轻松的对第一连接块进行调节的目的,解决了现有技术中,调节困难的问题。
附图说明
15.图1为本实用新型正视图;
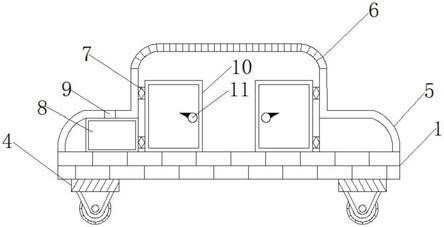
16.图2为本实用新型调节机构的正面剖视图;
17.图3为本实用新型图2中a的局部放大图;
18.图4为本实用新型弹簧的正视图。
19.图中:1底盘、2调节机构、201挡板、202第一连接块、203连接杆、204第二连接块、205支撑杆、206限位块、207托板、208弹簧、209提升杆、3转动机构、301平行板、302长绳、303稳定块、304转动块、305转轴、306电机、307凹槽、4滑轮、5车身、6盖板、7固定轴、8矩形仓、9连接孔、10活动门、11把手。
具体实施方式
20.如图1
‑
4所示,本实用新型提供一种技术方案:一种自动驾驶汽车用激光测距装置,包括底盘1,底盘1的底部固定安装有滑轮4,滑轮4的数量有四个,四个滑轮4的形状大小均相等,四个滑轮4分别固定安装在底盘1的底部四角位置,底盘1的上表面固定安装有车身5,车身5的顶部固定安装有盖板6,底盘1的顶部固定安装有矩形仓8,矩形仓8的内壁设置有调节机构2,车身5的表面固定安装有固定轴7,固定轴7的侧壁活动安装有活动门10,活动门10的数量有两个,两个活动门10的表面均活动安装有把手11,调节机构2包括挡板201、第一连接块202、连接杆203、第二连接块204、支撑杆205、限位块206、托板207、弹簧208和提升杆209;
21.挡板201的数量有两个,两个挡板201固定安装在矩形仓8的内壁,弹簧208的一端与挡板201的内壁固定连接,第一连接块202活动安装在矩形仓8的内侧底部,弹簧208的另一端与第一连接块202的侧壁固定连接,连接杆203的一端与第一连接块202的内壁相铰接,第二连接块204与连接杆203的另一端相铰接,支撑杆205固定安装在矩形仓8的内壁,限位
块206固定安装在支撑杆205的另一端,提升杆209活动安装在限位块206的内壁,托板207固定安装在提升杆209的顶部,第二连接块204的侧壁与提升杆209的侧壁固定连接,通过第一连接块202的拉动,拉动的时候,在连接杆203的作用下,促使第二连接块204的位置进行上升,第二连接块204还会进一步带动提升杆209的位置进行上升,限位块206可以有效的限制提升杆209的位置,提升杆209的顶部还会带动托板207的位置进行上升,进一步穿过连接孔9的内壁,达到了提升杆209上下移动的时候,就可以确定激光测距装置位置的目的,解决了现有技术中,自动驾驶汽车大多数都是通过激光测距的方式,来对障碍物进行躲避,但是现有的激光装置大多数都是位于汽车的前方位置,汽车移动的时候,容易促使激光装置遭到破坏,激光的位置总是固定不变的,这样就会促使装置存在一定的局限性;
22.矩形仓8的内壁设置有转动机构3,转动机构3包括平行板301、长绳302、稳定块303、转动块304、转轴305、电机306和凹槽307,凹槽307开设在矩形仓8的内壁,电机306固定安装在凹槽307的内壁,转轴305的底部安装在电机306的输出端,平行板301固定安装在转轴305的另一端,转动块304固定安装在平行板301的顶部,长绳302的一端与转动块304的表面固定连接,稳定块303的数量有两哥,两个稳定块303固定安装在电机306的两侧,通过开启电机306,电机306开启的时候,就会通过输出端的转轴305带动平行板301和转动块304一起进行转动,长绳302就会缠绕在转动块304的表面,此时长绳302的另一端就会对第一连接块202进行拉动,达到了减少人力物力的目的,可以轻松的对第一连接块202进行调节的目的,解决了现有技术中,调节困难的问题。
23.工作原理:装置在进行使用的时候,首先乘客可以通过把手11对活动门10进行开启,活动门10就会围绕着固定轴7进行转动,活动门10打开的时候,就可以进行乘坐,随后就可以通过底部的滑轮4对装置进行移动,移动的过程中,就会使用到激光测距,首先将激光测距装置固定安装在托板207的上表面,随后就可以开启电机306,电机306开启的时候,就会通过输出端的转轴305带动平行板301和转动块304一起进行转动,转动的时候,长绳302就会缠绕在转动块304的表面,此时长绳302的另一端就会对第一连接块202进行拉动,拉动的过程中,在连接杆203的作用下,促使第二连接块204的位置进行上升,第二连接块204还会进一步带动提升杆209的位置进行上升,限位块206可以有效的限制提升杆209的位置,提升杆209的顶部还会带动托板207的位置进行上升,进一步穿过连接孔9的内壁,装置完成工作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。