1.本装置属于路面构造深度测试领域。
背景技术:
2.路面构造深度是指一定面积的路表面凹凸不平的开口孔隙的平均深度,主要用于评定路面表面的宏观粗糙度、排水性能及抗滑性,与路面耐久性和行车安全息息相关。
3.目前,路面构造深度试验方法主要有两种:铺砂法和激光构造深度仪测量法。
4.铺砂法通过将已知体积的标准砂摊铺在所要测试路表的被测区域上,然后将标准砂的体积除以摊铺在测试路面上的面积,求得平均值深度作为路面构造深度。这种试验方法得到的是摊铺区域内的平均深度值。
5.激光构造深度仪测量法采用微小光斑的激光测距仪沿行车方向密集采样,得到纵剖面曲线。然后按照构造深度计算模型,求取构造深度值。我国所采用的构造深度值通常用激光测量法路面构造深度(laser measured texture depth,简称lmtd)表示。
6.铺砂法只能进行抽样检测,而且受因铺砂区域的形状的影响较大,测量结果有较大的不确定性,误差较大。而且因为其速度慢、效率低、人为因素影响大等不利条件,在通车公路上检测时,需阻断交通,且对操作人员的安全造成较大威胁,因此目前已较少使用。
7.采用激光构造深度仪测量法进行构造深度的测量,具有测试速度快、效率高、无需阻断交通等优点。目前,这种方法在我国已得到大量普及。在《公路路基路面现场测试规程》(jtg e60
‑
2008)、《多功能路况快速检测设备》(gb/t26764
‑
2011)等标准规范中已有明确要求。
8.目前,激光构造深度仪作为交通行业专用计量器具,其量值溯源工作还没能全面展开。业内对此类仪器设备的量值溯源一般采用计量检定的管理体制,仪器设备必须具有严密的量值溯源链。因此,建立科学、完善的路用激光构造深度仪计量标准,尽快实现路面激光构造深度仪的量值溯源,十分必要。
9.激光构造深度仪测量法采用微小光斑的激光测距仪沿行车方向密集采样,得到纵剖面曲线。然后按照构造深度计算模型,求取构造深度值。我国所采用的构造深度值通常用激光测量法路面构造深度(laser measured texture depth,简称lmtd)表示。
10.cn201410234665.9公开了一种激光路面构造深度仪的校准方法及装置,克服目前激光构造深度仪还没有严密的量值朔源链的不足。该校准方法包括:驱动测试件进行运动;获得测试件的被测表面上测点的运动速度;根据测点的运动速度驱动激光路面构造深度仪中的距离编码器进行转动;根据激光测距采样间隔以及距离编码器进行转动的实时转速,产生激光测距触发信号;接收激光路面构造深度仪根据激光测距触发信号反馈的测试件的被测表面的构造深度量值;采用测试件上被测表面的构造深度参考值对构造深度量值进行比对,获得激光构造深度仪的校准结果。本技术的实施例可以用来保存和传递路面激光构造深度量值,以计算被校准的激光构造深度仪测量值与参考值之间的误差。
技术实现要素:
11.现有设备工作面(转盘)高度偏高,影响了激光测量点的使用,实际使用时,需要将测试车辆车底盘用垫块加高,以方便测量。
12.为解决上述问题,提供一种低工作面直驱激光路面构造深度仪校准装置,其特征在于:
13.包括高度调节柱,转盘,螺纹轴,机身。机身通过螺纹轴依次连接有法兰盘和转盘;机身通过螺钉与直驱电机相连,直驱电机通过螺钉连接到法兰盘。法兰盘上留有三个突起的定位孔,便于与转盘凹进的定位槽相配合。
14.机身上设有高度调节柱;机身上设有动力线航空插头安装孔,机身上设有编码线航空插头安装孔。
15.动力线用于传输直驱电机的旋转信号,编码线用于反馈电机转速信号。
16.2.进一步,转盘和机身的间隙控制在3~4mm之间,
17.3.进一步,使用时,螺纹轴处需安装螺母。螺母拧掉,即可拿下转盘。正常运行时,转盘旋转方向会不断锁紧螺母,以防转盘飞出。
18.4.进一步,机身呈近似三角结构,确保设备主体高速运转时不晃动。
19.5.进一步,在机身各顶点处设计减重槽,故留出减重切削面。
20.(1)一种低工作面直驱激光路面构造深度仪校准装置采用直驱电机设计,减少了传统设备中采用减速器、传送带、同步带、齿轮耦合、蜗轮蜗杆配合等复杂结构,选用体积比传统伺服电机更小的直驱电机,在保证输出转速和功率等级同等的情况下,有效降低了工作面,即转盘顶面的高度,减少了实施人员提升带激光测量仪检测车垫高车辆底盘的操作,提升了测量效率,降低了测量的风险。
21.(2)顶部锁紧螺丝和转盘转向相反,保证了系统安全性。
22.(3)采用三角支腿结构,保证了设备高速旋转的稳定性,还可以便捷的调节工作面高度。
23.(4)本设备选用plc作为主控制器,选用带编码速度反馈功能的直驱电机,最高转速可达2500r/min,可准确调节转盘转速,转速精度达
±
5r/min。
附图说明
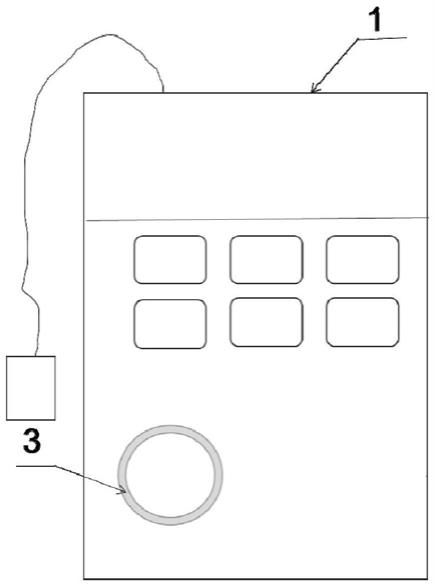
24.图1本装置结构示意图。
25.图2为俯视图,
26.图3为底视图,
27.图4为侧视图,
28.图5为设备爆炸图,
29.图6为系统简图。
具体实施方式
30.本装置1为高度调节柱,2为转盘,3为螺纹轴,4为机身。设备使用时,螺纹轴处需安装螺母。螺母拧掉,即可拿下转盘。正常设备运行时,转盘旋转方向会不断锁紧螺母,以防转盘飞出。机身呈近似三角结构,确保设备主体高速运转时不晃动,提高设备稳定性。
31.图2为俯视图,5为转盘和设备间的间隙,因转盘大小规格固定,为控制设备主体体积,间隙控制在3~4mm之间,当出现意外时,配合高度调节柱,可防止转盘侧向飞出。
32.图3为底视图,6处为减重切削面,7为固定螺钉。因设备采用铸铁材料,密度大,需要人工搬运,在保证高速旋转稳定的情况下,尽量降低设备重量,在机身各顶点处设计减重槽,故留出减重切削面。固定螺钉用于固定设备直驱电机,直驱电机上有相应的螺钉孔与其配合。
33.图4为侧视图,8为动力线航空插头安装孔,9为编码线航空插头安装孔。动力线用于传输直驱电机的旋转信号,编码线用于反馈电机转速信号。
34.图5为设备爆炸图,2为转盘,10为法兰盘,11为直驱电机,机身通过螺钉与直驱电机相连,直驱电机通过螺钉连接到法兰盘。法兰盘上留有三个突起的定位孔,便于与转盘凹进的定位槽相配合。法兰盘采用铝制结构,强度大,需求精度高。
35.图6为系统简图。
36.系统通过触摸屏实现人机交互,实现速度检测和运行模式选择。系统以plc为主控制器,通过d/a模块完成数字量到模拟量的变换,直驱电机驱动器接收1~5v电压信号,通过动力线控制直驱电机,通过反馈线接收实时速度信号,保证电机的旋转速度精度。
37.(1)一种低工作面直驱激光路面构造深度仪校准装置采用直驱电机设计,减少了传统设备中采用减速器、传送带、同步带、齿轮耦合、蜗轮蜗杆配合等复杂结构,选用体积比传统伺服电机更小的直驱电机,在保证输出转速和功率等级同等的情况下,有效降低了工作面,即转盘顶面的高度,减少了实施人员提升带激光测量仪检测车垫高车辆底盘的操作,提升了测量效率,降低了测量的风险。
38.(2)顶部锁紧螺丝和转盘转向相反,保证了系统安全性。
39.(3)采用三角支腿结构,保证了设备高速旋转的稳定性,还可以便捷的调节工作面高度。
40.(4)本设备选用plc作为主控制器,选用带编码速度反馈功能的直驱电机,最高转速可达2500r/min,可准确调节转盘转速,转速精度达
±
5r/min。
41.电机可以选用步进电机加编码器反馈。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。