1.方面和实施例涉及创建表示测量数据集的图像的方法、可运行以执行该方法的计算机程序产品和装置。
背景技术:
2.逆问题出现在许多领域。这些领域包括医学以及临床前的成像。
3.在处理成像领域的逆问题时,目标是估计一个或多个参数或者多维密度函数,它们代表一些感兴趣的对象,通常称为图像。例如,在医学成像中,感兴趣的逆问题通常称为图像重建,并且估计3d体素阵列或2d像素阵列内的感兴趣值。在一些示例中,这些感兴趣的值可以表示例如人体内放射性示踪剂(例如,正电子发射断层扫描(pet)和单光子发射计算机断层扫描(spect))的浓度、结合电位和/或摄取率,或者用于解剖成像(mri)的质子密度和组织松弛参数。
4.这种重建的图像和密度估计具有深远的应用。在医学领域,函数、分子和解剖图像的应用包括对疾病的理解、诊断和阶段划分以及了解健康的人体是如何运作的。在临床前成像领域中,重建的图像对疾病研究和新药品开发具有价值。在其他领域中,重建的图像在例如安全检查、卫星监视的安全应用或例如无损检测和地震成像的安全应用中可能具有价值。
5.与所有逆问题相关的问题是,如果收集的数据有噪声,那么通常不存在针对逆问题的独特噪声补偿解决方案。如果不存在独特的解决方案,选择的负担就落在那些制造和使用成像和传感设备来为图像重建过程选择一个或多个固定噪声补偿参数的人身上。这些噪声补偿参数的选择可以选择可能满足逆问题的许多解决方案中的一个。应当理解,收集的数据中的噪声会以各种方式损害图像重建,并且噪声补偿和校正方式旨在抵消这些损害。与此相结合,可以部署噪声消减方法,其目的可以是减少和减轻收集的数据集中的噪声。
6.关于医学成像,根据噪声补偿程序和噪声补偿参数的特定固定选择,由临床医生解释的图像将取决于制造商或用户,并且如果使用先验信息,这些固定的噪声补偿参数可以控制要使用的先验信息的强度。应当理解,许多可能的图像可能已经呈现给临床医生,每个图像可能被不同地读取,可能导致不同的诊断、预后或医学评估。
7.决定用于解释目的的结果图像的噪声补偿参数的选择是成像领域中的重要问题。这对于多模态或协同图像重建尤其如此。在使用来自其他模态的信息(例如,磁共振(mr)图像来辅助pet重建)的这些方式中,重要的是不要误用来自其他模态的信息(如果选择了不合适的参数,就会发生这种情况)。
技术实现要素:
8.第一方面提供了一种通过迭代更新基础图像来创建表示测量数据集的图像的方法,该方法包括:从测量数据集生成主要数据集,主要数据集包括与测量数据集具有基本相
同水平的噪声的数据集;从测量数据集生成至少一个附加数据集,该附加数据集包括:从测量数据集生成的数据集,使得每个附加数据集与测量数据集具有基本相同水平的噪声,并且每个附加数据集不是与主要数据集完全相同的;使用主要数据集和每个附加数据集处理没有噪声补偿的基础图像,以分别得到主要中间图像和至少一个附加中间图像;比较主要中间图像和至少一个附加中间图像以确定噪声存在水平的指示;并且使用所确定的噪声存在的指示来选择噪声补偿以在使用测量数据集处理基础图像时应用,以创建表示测量数据集的新基础图像。
9.第一方面认识到,噪声可能是成像中的关键问题。在噪声很显著的应用(例如发射断层扫描图像重建)中,噪声尤其是问题。如下文更详细描述的,使用纯粹最大似然或最小二乘估计的图像重建方式对临床或研究任务没有用处。认识到的是,在解决噪声问题时,交叉验证可以提供一些帮助。交叉验证为图像重建提供了噪声补偿参数的数据驱动选择。
10.第一方面在利用交叉验证技术的同时解决了已知图像重建方式的一些问题。特别地,第一方面认识到,处理测量数据集和处理一个或多个自举数据集(每个都遭受与测量数据基本相同的噪声)可以提供客观机制来获得测量数据集中的噪声水平的指示。根据一个或多个处理过的自举数据集和处理过的测量数据集,可以比较处理过的自举数据集和处理过的测量数据集并计算适当的噪声补偿参数以在创建图像时应用于测量数据集。
11.因此,根据第一方面应用的噪声补偿程序是需要将每个处理过的自举数据集尽可能接近地映射到处理过的测量数据集的映射,并且根据第一方面的方法可以运行以找到合适的噪声补偿参数组以应用于特定的噪声补偿程序。
12.第一方面可以提供一种通过迭代更新基础图像来创建表示测量数据集的图像的方法。该方法可以包括从测量数据集创建主要数据集,主要数据集包括与测量数据集具有完全相同、相似或相同水平的噪声的数据集。该方法可以包括从测量数据集创建至少一个附加数据集,该附加数据集包括:从测量数据集采样的自举数据集,该自举数据集是从测量数据集中选择的,使得每个附加自举数据集都与测量数据集具有完全相同、相似或相同水平的噪声。每个附加自举数据集可以与测量数据集的大小基本相同。该方法可以包括使用第一数据集和每个附加数据集处理没有使用噪声补偿的基础图像,以分别获得主要中间图像和至少一个附加中间图像。该方法可以包括在主要中间图像和至少一个附加中间图像之间进行一些比较。该比较可用于确定在测量(以及自举)数据集中噪声存在的水平的指示。方法可以包括使用所确定的噪声存在的指示来选择噪声补偿水平,以在使用测量数据集处理基础图像时应用,以创建表示测量数据集的新基础图像。特别地,可以基于由比较步骤产生的噪声的指示来选择在噪声补偿程序中应用的噪声补偿参数。
13.在一些实施例中,主要数据集包括测量数据集。在一些实施例中,主要数据集包括从测量数据集创建的自举数据集。在一些实施例中,主要数据集包括从所述测量数据集生成的通过其他采样或机器学习方法类似生成的数据集。
14.在一些实施例中,创建至少一个附加数据集的步骤包括从测量数据集创建两个或多个附加数据集,附加数据集中的每个都包括:从选定的测量数据集中采样的自举数据集,使得每个附加数据集与测量数据集具有基本相同水平的噪声。
15.在一些实施例中,生成至少一个附加数据集的步骤包括:创建从测量数据集采样的一个或多个自举数据集。
16.在一些实施例中,生成至少一个附加数据集的步骤包括从测量数据集生成一个或多个附加数据集,附加数据集中的每个都包括:从测量数据集生成的数据集,使得每个附加数据集与测量数据集具有基本相同水平的噪声,并且使得每个附加数据集与测量数据集不是完全相同的。
17.在一些实施例中,比较主要中间图像和至少一个附加中间图像以确定噪声存在的指示包括:考虑主要中间图像和至少一个附加中间图像之间的比较以确定噪声存在的指示。因此,可以更全面地了解测量数据集中可能的噪声水平。
18.在一些实施例中,考虑的步骤包括一次或多次:计算附加中间图像相对于主要中间图像的分布的一个或多个特征。这样的特性可以包括例如计算平均噪声指示、计算中值噪声指示或计算最大噪声指示。
19.在一些实施例中,考虑包括:基于从一个或多个附加数据集创建的一个或多个附加中间图像,与从测量数据集创建的主要中间图像相比,实施人工神经网络以寻求适当的噪声补偿以应用于测量数据集。因此,可以通过适当配置的神经网络的适当应用来有效地发现应用于给定数据集的最佳噪声补偿方式(参数和程序)。
20.在一些实施例中,该方法包括:使用选定的用于基于测量数据集处理基础图像的迭代更新的噪声消除,以获得基础图像的进一步迭代更新。因此,继续迭代可以将任何基础图像移向由测量数据集表示的“真实”图像。
21.在一些实施例中,该方法包括:使用选定的噪声补偿程序处理基础图像。在一些实施例中,方法包括:使用不同的选定噪声补偿程序处理基础图像。在一些实施例中,方法包括:比较使用选定噪声补偿程序和不同的选定噪声补偿程序获得的创建图像以选择适当的噪声补偿程序从而应用于测量数据集。在一些实施例中,适当的噪声补偿程序的选择包括选择提供最接近于主要中间图像的附加中间图像的噪声补偿程序。因此,实施例可以扩展噪声补偿可能性的范围并且可以根据收集的数据优化其使用。噪声补偿方式可以像高斯平滑内核(其中,可以在每个迭代步骤中找到最佳内核宽度)一样简单,也可以像高级引导平滑一样复杂(同样,具有根据测量数据专门优化的参数化),以包含在重建中。
22.在一些实施例中,比较主要中间图像和附加中间图像以确定噪声存在的指示包括:实施目标函数,根据该目标函数,目标是找到用于噪声补偿程序的一个或多个参数,当找到该参数并应用于一个或多个附加中间图像时,该噪声补偿程序引起每个附加中间图像的更新,使得它们与主要中间图像的集体差异最小化。换而言之,可以使用去噪程序,其可以直接嵌入到图像重建迭代算法中的任何或每个步骤。实施例可以运行以使得它们对于给定的测量数据集针对基础图像的每次迭代更新自适应地并且精确地优化任何去噪程序的参数化。
23.在一些实施例中,目标函数包括:与附加中间图像和主要中间图像之间的距离相关的度量。在一些实施例中,与距离相关的量度包括:距离的平方和、距离的kullback
‑
leibler度量、任何作为距离度量的范数或其他与距离相关的适当交叉似然度量中的一个。在一些实施例中,迭代更新包括加法或乘法更新。也就是说,可以以各种方式进行主要中间图像和附加中间图像之间的比较以确定测量数据集中的噪声水平并因此为给定噪声补偿程序确定适当噪声补偿参数。
24.在一些实施例中,具有噪声补偿的处理对应于从任何正则化迭代图像重建算法导
出的正则化迭代更新。在一些实施例中,噪声补偿程序对应于训练为映射任何附加中间图像以匹配主要中间图像的人工神经网络,使得人工神经网络训练可应用于主要中间图像以获得基础图像的更新。也就是说,可以从各种可用的噪声补偿程序中选择在处理基础图像以获得表示测量数据集的图像时应用的噪声补偿程序。
25.在一些实施例中,修改噪声补偿的参数以引起比优化程序发现的更高水平的噪声补偿,以减慢基础图像的迭代更新。在一些实施例中,修改噪声补偿的参数以引起比优化程序发现的更高水平的噪声补偿,以避免残留噪声的积累。因此,可以实施谨慎的更新过程以更温和地迭代更新基础图像。
26.在一些实施例中,持续的迭代更新使得实施的噪声补偿参数选择为越来越接近由目标函数的优化找到的参数。在一些实施例中,持续的迭代更新使得实施的噪声补偿参数选择为越来越接近由目标函数的优化找到的参数。在一些实施例中,持续的迭代更新使得实施的噪声补偿参数选择为越来越接近由优化程序找到的参数,并且参数选择为对应于从所有先前在持续迭代更新中使用的优化程序发现的最高水平的噪声补偿。
27.在一些实施例中,生成至少一个附加数据集的步骤包括从测量数据集生成一个或多个附加数据集,该生成包括采样或机器学习方法,并且附加数据集中的每个都包括:从测量数据集生成的数据集,使得每个附加数据集与测量数据集具有基本相同水平的噪声,并且使得每个附加数据集与测量数据集不是完全相同的。
28.在方法包括使用选定的噪声补偿程序处理基础图像的实施例中,该噪声补偿方式可以与人工神经网络的使用一样先进。
29.在去噪过程直接嵌入图像重建迭代算法中的任何或每个步骤的实施例中,应当理解,方法运行为对于给定的测量数据集针对基础图像的每次迭代更新自适应地并且精确地优化任何去噪程序的参数化。去噪过程的自适应和精确优化是自动的,不需要任何用户提供的参数或指导。
30.在方法包括使用噪声补偿的处理的步骤的实施例中,使用噪声补偿的处理可以对应于从任何正则化迭代重建算法导出的正则化迭代更新。这种方式可以允许从一个以上的先验选择自动和精确地优化正则化水平,使得可以自动选择先验信息的不同选择的强度。例如,与非引导平滑相比,要使用多少引导平滑信息。换而言之,可以选择要应用每个噪声补偿程序中的多少,而不是从一组可能的噪声补偿程序中挑选。这种实施意味着该方法可以运行使得不需要从一组可能的噪声补偿候选中挑选单个候选,而是可以应用多于一个噪声补偿候选的不同部分。
31.作为澄清,需要说明的是,在一些实施例中,第一方面的方法设想为完全自动的。也就是说,该方法可以在不需要用户对操作参数进行任何选择的情况下发生。也就是说,该方法可以是完全数据驱动的,因为例如过分谨慎的初始参数的预选以适应所有数据集和所有噪声水平的结果是任何测量数据集的处理都是全自动和精确的过程。
32.总而言之,第一方面提供了一种通过迭代更新基础图像来创建表示测量数据集的图像的方法,该方法包括:从测量数据集生成主要数据集,主要数据集包括与测量数据集具有基本相同水平的噪声的数据集;从测量数据集生成至少一个附加数据集,该附加数据集包括:从测量数据集生成的数据集,使得每个附加数据集与测量数据集具有基本相同水平的噪声,并且每个附加数据集不是与主要数据集完全相同的;使用主要数据集和每个附加
数据集处理没有噪声补偿的基础图像,以分别得到主要中间图像和至少一个附加中间图像;比较主要中间图像和至少一个附加中间图像以确定噪声存在水平的指示;并且使用所确定的噪声存在的指示来自动选择噪声补偿以在使用测量数据集处理基础图像以创建表示测量数据集的新基础图像时应用。
33.至少一个附加数据集可以包括以纯数据驱动方式从测量数据集生成的自举数据集。这种方式是真正数据驱动的,并减少了方法从其他数据中学习的任何机会。当然,一些实施例可以允许至少一个附加数据集包括由人工神经网络(ann)从测量数据集生成的数据集。在一些实施例中,ann可以部分或全部用于噪声补偿程序。
34.第二方面提供了一种计算机程序产品,当在计算机上执行时,其可运行以执行第一方面的方法。
35.第三方面提供了配置为从基础图像创建表示测量数据集的图像的成像装置,该装置包括:数据集生成逻辑,其配置为从测量数据集生成主要数据集(其与测量数据集具有基本相同水平的噪声)以及从测量数据集生成至少一个附加数据集,选择每个附加数据集使得它们包括与测量数据集具有基本相同水平的噪声的数据集;处理逻辑,其配置为使用主要数据集和至少一个附加数据集处理基础图像以分别获得主要中间图像和至少一个附加中间图像;比较逻辑,其配置为比较主要中间图像和至少一个附加中间图像以确定噪声存在的水平的指示;图像创建逻辑,其配置为使用所确定的噪声指示来选择在使用测量数据集处理基础图像以创建表示测量数据集的新基础图像时应用的噪声补偿水平。
36.第三方面的实施例对应于关于第一方面描述的实施例。
37.在所附的独立和从属权利要求中阐述了进一步的特定和优选方面。从属权利要求的特征可以适当地与独立权利要求的特征组合,并且可以与权利要求中明确阐述的那些不同的组合。
38.在装置特征描述为可运行以提供功能的情况下,将理解这包括提供该功能或适配或配置为提供该功能的装置特征。
附图说明
39.现将结合附图对本发明的实施例作进一步说明,其中:
40.图1包括使用三种不同计数级别用不同重建方法获得的一组pet图像;
41.图2是图1中对象的mr图像
42.图3包括使用三种不同计数级别用不同重建方法获得的一组pet图像,这些方法利用了来自对象的mri的结构先验信息;
43.图4示意性地示出了数据处理的一般方式;
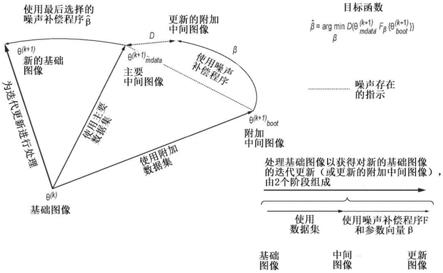
44.图5示意性地示出了根据图4的数据处理方式的一般成像方式的概念概览。
具体实施方式
45.如前所述,在处理成像领域的逆问题时,目标是估计一组对象表示参数或多维密度函数,其表示一些感兴趣的对象,通常称为图像。例如,在医学成像中,感兴趣的逆问题通常称为图像重建。
46.这是医学成像行业的问题,因为制造商和/或用户需要为图像重建指定噪声补偿
参数。例如,对于pet成像,这些噪声补偿参数可以包括:迭代次数和平滑级别。选定的参数将对重建的图像产生重大影响。在医学成像应用中,重建的图像会影响临床医生读取扫描“结果”的方式,进而影响诊断和患者管理决策。对于pet和spect成像,由于有限的扫描时间和注入患者或研究对象的有限放射性量,获得的发射数据非常嘈杂,因此重建的图像也存在噪声问题。
47.图像重建中用于补偿噪声的典型解决方案分为7个类别,每个类别都需要制造商和/或用户预先选择噪声补偿参数:
48.1)后平滑
49.图像/参数映射在重建后的后处理和/或平滑可以成功地减轻噪声。然而,这种后处理是以降低空间分辨率为代价的:丢失了医学图像中的重要细节。这适用于传统的滤波反投影(fbp)方法以及迭代图像重建方法,例如有序子集期望最大化(osem)。除非应用平滑,否则这些方法都会产生噪声图像。可以应用更先进的后处理方法,但在每种情况下,后处理仍然需要选择噪声补偿水平,面临与下面关于类别3所描述的相同问题。
50.2)早停法
51.通常在迭代过程中提早停止诸如最大似然期望最大化(mlem)或其加速版本osem的方法,因此不需要上述的平滑。然而,这是以潜在的空间变化的噪声和分辨率性质为代价的,伴随着某些区域比其他区域具有更低的噪声,并且图像的某些细节未完全解析而其他区域已解析。最后,需要选择迭代次数(此情况下的噪声补偿参数为迭代次数),因此由用户直接选择噪声级别。交叉验证和其他停止规则消除了迭代次数的选择,但留下了迭代重建算法不完全收敛的问题。
52.3)正则化方法
53.贝叶斯和最大后验(map)方法与迭代算法一起使用,其对图像施加先验期望,例如平滑度或限定区域内的平滑度(例如,通过使用解剖信息和边缘保留先验,例如使用mri引导pet重建的正则化)。这些方法的问题是需要仔细选择参数(在贝叶斯上下文中称为超参数),这会影响噪声和分辨率的水平,并且实际上需要为每次扫描仔细调整参数选择。事实上,确保为给定数据集的任何给定重建选择了最佳参数是极其困难的。低估正则化会在图像中留下太多噪声,而高估正则化参数会损害重要的图像细节。这对于多模态成像来说尤其成问题,如果要使用mri(举例而言)来指导pet或spect图像重建的正则化:应该使用多少先验信息,先验应该有多“强”?
54.4)基准变更
55.这些方法使用不同于传统像素或体素的空间基函数,例如较大的感兴趣区域(roi),或从细节的时间相似性导出或从其他成像模态(例如mri)的相似性度量导出的内核空间基函数。这些方法成功地减少了噪声,但对图像施加了一定的结构,再次让用户承担了内核生成的参数选择负担,从而细节和噪声补偿的水平以及要使用的迭代次数再次掌握在用户手中。
56.5)更新间过滤
57.这类似于上面描述的后平滑方法,但在迭代之间进行。需要决定应用多少平滑也会引起同样的问题:噪声补偿的参数选择问题。
58.6)基于交叉验证的停止
59.这种方式提前终止重建,因此使用不完全收敛的重建,可能会遭受与上述类别2类似的问题。因此,交叉验证停止规则在例如发射断层扫描社区没有得到任何显着的采用。
60.7)基于有限网格搜索的参数选择
61.这种方式要求用户为噪声补偿预先选择有限数量的固定候选参数集。然后对每个候选参数集进行完整的重建,并使用l曲线方法或交叉验证方法来选择使用这些重建参数集中的哪一个。这些方法在两个主要方面受到限制:需要用户预先选择有限数量的固定候选参数,以及需要为每个候选参数集进行完整的(通常是计算密集型的)图像重建。此外,在交叉验证的情况下,还需要限定用于交叉验证目的的数据子集,对此有许多可能的选择。
62.工业上用于临床pet成像的这些方式的具体实施包括:西门子的osem和/或hd
‑
pet:通常依靠提前终止(类别2)或后处理(类别1)来补偿噪声;以及来自ge的qclear,其要求用户决定关键的正则化参数(类别3)。
63.依赖于符合上述7个类别的方法来补偿发射断层扫描数据中的图像噪声的方法的主要缺点包括:不存在选择噪声补偿水平的精确优化、实际稳固或计算有效的方法。很明显,根据噪声级别和成像的对象,不同的数据集需要不同级别的噪声补偿。此外,用户或制造商需要指定图像中应该存在多少噪声补偿(例如平滑或正则化),这是主观的,或者在最好的情况下也不是实际获取数据的最佳选择,并且涉及用户限定的噪声和图像细节之间的权衡。如果使用多模态信息来辅助重建,未知的是应该或不应该使用多少先验信息。
64.概述
65.在详细描述布置的具体实现的细节之前,提供了对方式的综合概述。
66.众所周知,噪声可能是成像中的关键问题。在噪声很显著的应用(例如发射断层扫描图像重建)中,噪声尤其成为问题。如上所述,纯粹使用最大似然或最小二乘估计的图像重建方式对于临床或研究任务没有用处。
67.当前用于抵消噪声的方法包括:后重建平滑,其伴随着平滑多少的问题;迭代算法的提前终止,随之而来的问题是何时终止、这样的图像对应什么以及空间变量收敛关注什么;以及最大化后验重建,其伴随着应该正则化多少(即超参数的选择是什么,超参数通常标记为β)的问题。
68.众所周知,交叉验证(cv)可以在解决噪声问题时提供一些帮助。cv为图像重建提供了数据驱动的噪声补偿参数选择。
69.已知的cv方法存在问题,例如,cv需要对数据进行分区,并且在例如pet重建中早期使用cv简单地将获得的数据分成2,因此噪声补偿参数的“最优性”最终基于数据子集。已知方式中的cv要么不用于提供可靠的图像(例如,具有提前终止问题的早停法),要么涉及从有限数量的固定的候选噪声补偿参数选择中进行相对粗略的选择,其中对于每个选择都需要完整的图像重建。
70.方式认识到自举调整方式可能是有用的方法。自举获取新数据集意味着相同大小的数据可以用作“附加”数据集,这解决了上述cv的第一个问题。
71.同样,方式认识到数据生成方式(例如来自人工神经网络)可用于获取新数据集,这也意味着相同大小的数据可用作“附加”数据集,再次解决了上述cv的第一个问题。
72.图4示意性地示出了在下面详细描述的各种实现中使用的一般方法。
73.处理测量数据和处理一个或多个生成(例如自举)数据集(每个数据集遭受与测量
数据基本相同的噪声)提供了测量数据中噪声的指示。从处理后的生成(例如,自举)数据集和处理后的测量数据,可以比较处理后的生成(例如自举)数据和处理后的测量数据,并计算适当的噪声补偿参数以应用于测量数据的处理。
74.噪声补偿程序是使每个处理过的生成(例如自举)数据集与处理过的测量数据尽可能接近地匹配所需的映射。
75.给定噪声补偿程序的噪声补偿参数由下式给出:
[0076][0077]
方式用于找到合适的噪声补偿参数集,以应用于特定的噪声补偿程序。
[0078]
应当理解,方式可以应用于给定测量数据集的一个或多个噪声补偿程序,方式的每个应用给出用于给定噪声补偿程序的一个或多个噪声补偿参数的相关联组。
[0079]
随后可以实施方式来客观地“选择”适当的噪声补偿程序以应用于给定的测量数据集。换而言之,可以以这种方式实施方法以识别最适合于给定测量数据集的(噪声补偿程序的给定选择的)噪声补偿程序。
[0080]
图5示意性地示出了根据图4的数据处理方式的一般成像方式的概念概览。与关于图4和图5描述的方式一致的方式可以为逆问题提供客观的、用户独立的解决方案。这种逆问题可以包括例如pet或spect中的图像重建和动力学/函数参数估计。
[0081]
方式可以允许图像重建,而无需制造商或用户指定与要使用的噪声补偿水平相关的超参数。方式可以提供一种与多模态成像(例如同步pet
‑
mr)相关的有用方法,其中需要利用来自每种模态的信息,但有多少先验信息(如果有的话)可以安全地用于重建是未知的。
[0082]
方式认识到可以使用一个或多个易于生成的自举数据集,以为每次和每个迭代更新估计适当的噪声补偿参数。
[0083]
方法认识到几乎所有迭代图像重建方法都可以视为在任何给定步骤更新函数u来提供新的图像θ
(k 1)
,其中更新函数u使用当前图像(由迭代k的参数θ
(k)
描述)和测量数据m:
[0084]
θ
(k 1)
=u(θ
(k)
,m)
ꢀꢀ
(1)
[0085]
迭代图像重建算法实际上在每次迭代时进行,以将新的“变化图像”添加到当前图像,从而朝着满足目标函数(例如,最大似然(ml)、最小二乘(ls)或最大后验(map))要求的图像前进。例如,对于mlem算法,需要满足的是ml目标。对于map,需要满足的是用户指定的正则化目标(具有用户指定的正则化超参数),它可以利用来自其他成像模态(例如,用于pet的mri)的先验信息。然而,mlem和其他非正则化目标/算法(例如ls/共轭梯度)会导致过度的噪声放大,而map和其他正则化方法会导致用户选择在图像细节和图像噪声之间的权衡。
[0086]
方式认识到使用自举复制数据集b是合适的,它是通过对测量数据m重新采样获得的,以在迭代k时给出自举更新图像:
[0087][0088]
更新的图像也会受到b中存在的噪声的影响,但值得注意的是,这将与m中的噪声不同(自举将实际的测量数据m视为诸如b的大型噪声数据集的均值模型)。
[0089]
方式通过优化应用于自举更新的噪声补偿参数,然后使用这些优化的噪声补偿参数来处理来自测量数据的标准迭代更新,从而将自举更新图像拟合到常规测量数据更新图像,以获得图像的下一个迭代更新。
[0090]
优化阶段是图像空间拟合,可以通过实现交叉目标函数、“集成平均目标函数”或成本函数来实现,如下所示:
[0091][0092]
其中目标是为降噪算子f
β
{}找到一个或多个最佳噪声补偿参数,当以某种方式(将在下面详述)将降噪算子f
β
{}应用于图像自举迭代更新时,根据交叉目标函数导致最适合常规更新图像的自举更新
[0093]
交叉目标函数是与两幅图像之间的距离d相关的度量(可以通过多种方式进行度量),但对于高斯数据则对应于最小二乘拟合(以最大化高斯交叉似然),而对于泊松分布数据则对应于kullback
‑
leibler(kl)距离度量(以最大化泊松交叉似然)。
[0094]
这个交叉目标函数也可以看作是“总平均目标函数”。总平均目标函数是与一大群噪声更新图像的(由建模)的平均值以及任何一个或多个噪声更新之间的距离d相关的度量。
[0095]
找到最佳降噪参数(其最小化交叉目标)后,下一次的图像更新可以由下式给出:
[0096]
θ
(k 1)
=f
β
{u(θ
(k)
,m)}
ꢀꢀ
(4)
[0097]
可以为下一次迭代更新重复该过程,依此类推。
[0098]
方式认识到,需要修改早期迭代更新中的噪声补偿参数,以产生比优化程序发现的更高水平的噪声补偿,从而减慢迭代更新并避免由于无法将噪声补偿自举更新图像完美地拟合到常规测量数据更新图像而导致的残留噪声的积累。
[0099]
方式认识到,随着持续迭代更新,噪声补偿参数选择为越来越接近由优化程序找到的噪声补偿参数,并且噪声补偿参数选择为对应于从所有先前在持续迭代更新中使用的优化程序发现的最高水平的噪声补偿。
[0100]
图5示意性地示出了根据图4的数据处理方式的一般图像重建方式的概念概览。如图5概念性示出的,通过使用测量数据集的迭代更新u处理基础图像,以提供“标准”更新。还概念性示出了使用同一迭代更新函数u的基础图像处理,但使用自举数据集以提供“自举”更新。这些更新可以视为“中间”图像或更新。如图5中示意性示出的,可以找到在自举图像更新上操作以最小化标准图像更新和自举图像更新之间的差异的噪声补偿参数。找到满足最小差异标准的噪声补偿参数后,这些噪声补偿参数可用于通过迭代更新u处理基础图像,同时还应用噪声补偿以给出新的更新的基础图像。
[0101]
在给出了综合概述之后,下面详细介绍了一些方法的具体实现:
[0102]
a)附加变化图像的过滤
[0103]
这是一种简单而且直观的方式,鉴于其简单性、灵活性和稳定性,可能会吸引许多人。更新的函数建模如下:
[0104][0105]
其中δ
(k)
(b)是迭代k的“变化图像”,其有效地添加到当前图像以获得下一次更新。方式为变化图像选择去噪程序,其可以是从简单的高斯平滑到多模态引导滤波程序,甚至是基于机器学习的去噪(例如人工神经网络)的任何东西。去噪程序可以由算子f
β
{}表示,
[0106][0107]
目标设置为通过使用交叉目标函数(3)找到一个或多个噪声补偿参数β的“最佳”选择。在pet或spect数据的情况下,目标将对应于最小化两个图像之间的kl距离(该距离度量直接来自寻求最大泊松对数似然估计)。应当理解,可以选择除最小化kl距离之外的目标。
[0108]
在等式(6)中,f
β
{}噪声补偿程序(例如,简单平滑,或在pet或spect的mr引导情况下的多模态引导边缘保留平滑)具有一个或多个噪声补偿参数β。在一个示例中,用户选择噪声补偿程序而不是噪声补偿参数β。根据方式的交叉目标拟合自动运行以适应测量数据中的噪声水平并选择合适的噪声补偿参数。
[0109]
应当理解,虽然上面的示例涉及噪声补偿应用于添加更新(“变化图像”)的情况,但方式可以类似地应用于乘性更新,或者甚至应用于整个更新图像。
[0110]
通过交叉目标函数的使用找到了一个或多个“最佳”噪声补偿参数β,可以根据下式,使用优化的噪声补偿参数更新从原始测量数据获得的图像。
[0111][0112]
b)简单的更新之间的过滤器
[0113]
在(a)中描述的方法的变体,其中(6)替换为:
[0114][0115]
由于整个更新图像而不仅是单独的噪声更新“变化图像”受到噪声补偿,因此这种方法与(a)中描述的方法不同。
[0116]
c)map
‑
em更新
[0117]
一般方式的另一种实现是将其应用于使用map目标的贝叶斯(bayesian)方法。任何依赖于选择先验和正则化超参数的map更新算法都可用于生成处理过的自举更新。
[0118]
例如,对于图像的加权二次吉布斯(gibbs)先验概率,使用depierro[1]的方法可以得到基于map目标的迭代em更新,其一般形式如下:
[0119][0120]
其中项b和c取决于来自当前图像θ
(k)
的相邻体素的加权组合,允许例如通过空间变量加权二次先验(例如bowsher[2]的方法)进行多模态引导正则化。根据这样的实现,噪声补偿参数β被称为贝叶斯先验的超参数,其中很明显的是β=0对应于没有噪声补偿,因此
选择β是一个至关重要的挑战。
[0121]
基于等式(9),可以和自举数据一起使用β的交叉目标优化,以在迭代map
‑
em更新中包括适当数量的先验信息。这种一般方式的实现解决了与正则化方法相关的重大挑战,尤其是在多模态引导图像重建的背景下。
[0122]
这种方式允许β的自动和精确优化,并且用户不需要指定任何级别的正则化来实现收敛的map
‑
em图像重建算法。该算法提供满足所需的正则化目标函数的重构图像的最终收敛估计。
[0123]
应当理解,在目标函数中可以使用多于一个正则化分量,例如,用于第一部分的β1,用于第二部分的β2等等。这在引导图像重建的背景中可能具有独特价值,由此可以自动且精确地找到引导正则化的级别,以及常规的非引导正则化的级别(例如,二次惩罚函数)。
[0124]
应当理解,由于测量数据中的噪声趋于零(即无穷计数),自举数据将趋向于测量数据。因此,对于没有噪声的数据不需要噪声补偿(来自交叉目标函数、“总平均目标函数”的最佳β将接近零)。相比之下,随着噪声的增加(即低计数),自举数据导出的更新将需要提高噪声补偿水平以适应从测量数据导出的更新。换而言之,由于需要更多的噪声补偿来将噪声更新映射到噪声更新集合的均值模型,来自交叉目标拟合的最佳β将随着测量数据中噪声的增加而增加。
[0125]
方式展示
[0126]
为了展示上述一般方式的实施效果,使用了真实数据来展示map em 3d重建的情况。
[0127]
下面描述的附图示出了一般策略的有效性,对于pet数据的自动噪声消除,在不同的噪声水平下,无需用户选择噪声补偿水平。
[0128]
图1包括低、中和高计数数据比较(测量实际数据的1%、10%和100%)。第一列包括这三种情况的常规mlem重建,第二列示出具有典型的使用4mm高斯内核的后平滑(通常作为临床图像的标准进行)的这些图像。最右边的三列(第4、5和6列)示出了不同超参数β的选择的标准mapem重建,从中可以看出,由于不同计数级别的不同超参数选择,获得了视觉上更好的结果。图中带轮廓的第三列示出了自举优化的mapem方法自动为所有计数级别提供高质量的图像,除非用户调整和探索它们的超参数,否则使用其他方法无法找到这些图像。
[0129]
图2示出了图1中对象数据的mr图像。
[0130]
图3包括与图1类似的比较,列和图像的一般结构与图1中描述的相同,但现在使用图2中的mr图像,以使用bowsher方法[2]为map em提供先验结构信息从而辅助噪声补偿。在这种情况下,自举优化的mapem方法会自动为所有噪声级别选择合适的超参数。应当理解,由上述实施方式应用的噪声补偿水平适合于数据中的噪声水平。据信,与其他列中示出的当前标准方法相比,临床医生更喜欢诸如第三列中示出的图像。
[0131]
图1和图3示出了使用根据所描述的方式的实现的可能结果,具有高计数数据和极低计数数据,并且在这两种情况下都使用了相同的算法。可以看出,通过应用根据所描述的方式的方法,可以获得一致的高质量图像。第三列示出了很好的结果,其中平滑的强度以及使用的先验量在视觉上是合适的。
[0132]
应当理解,存在将所描述的方式应用于各种其他先验和过滤器以及涉及这些先验和过滤器中的所有各种超参数的范围。可以考虑大量先验和图像处理过滤器,这意味着所
描述的方式对于最先进的图像去噪方法(例如,基于引导平滑的方法、基于局部补丁的方法或那些基于各种人工神经网络架构的方法)的开发具有相当大的潜力,通过将它们嵌入到严格的框架(其为图像重建提供自动选择的噪声补偿水平)中,用户或制造商只需选择使用哪种噪声补偿方法,而无需指定噪声补偿参数(即应用多少)噪声补偿。
[0133]
方法的实现允许通过交叉目标拟合在整个迭代更新中客观和精确地选择图像细节和图像噪声之间的权衡。方式移除来自用户和/或制造商的任意噪声补偿参数选择,提供重建图像质量的稳健性。以前在发射断层扫描中没有获得过这种对高度变化计数水平的稳健性。方式在多模态成像的背景中特别有用,其中可以使用其他图像来辅助噪声消除,并且在决定应该使用这种附加信息源的强度时是非常主观的。
[0134]
使用所描述的方式的实现方式的优点可能包括,例如:
[0135]
1)对所得图像质量的客观性的信心。要应用的噪声补偿级别的自动选择意味着通过自举交叉目标去噪参数估计重建的图像是低噪声图像,其细节仅与数据支持的一样多。根据数据的统计质量,结果表明,根据所描述的方式的方法收敛到良好质量的图像。现有的方法通常取决于用户或制造商指定的噪声消除的不同级别,通常会与数据不一定支持且可能是扫描的错误表示的图像特征进行权衡。
[0136]
2)用于使用任何去噪或噪声补偿方法的实现范围。方式允许在允许任何去噪程序的“最佳”开发的框架内的实现,例如简单的高斯内核平滑方法、简单的正则化(如图1所示)到多模态引导正则化方法(如图3所示)以及机器学习方法(例如人工神经网络)的使用。这对于多模态引导可能特别重要,多模态引导中过度使用任何先验结构信息从而提供误导的和/或人造模样的图像是很常见的。通过使用例如上述方式获得的结果说明了如何在强度和边缘灵敏度(其自动适应于数据的质量)下使用先验图像引导,避免现有引导正则化方法的主要问题。
[0137]
3)简单性、适用范围和实用性:制造商或用户不再具有指定噪声补偿参数来重建给定数据集的任务,因此图像中的信息级别(空间分辨率和细节对比于噪声量)不再依赖于主观参数选择。方法实施起来非常简单,允许通过任何优选的噪声补偿程序的嵌入来调整任何迭代图像重建方法,其中噪声补偿的强度将取决于数据并由该方法自动找到。不同的最先进噪声补偿方法的探索范围是可观的,允许在测量数据支持的强度下实现基于多模态的噪声补偿。
[0138]
4)理论吸引力:重建的图像使用从统计动机的目标函数找到的噪声补偿参数:它是为迭代重建中的给定更新步骤优化交叉目标的图像,这可以是交叉似然(泊松或高斯)。
[0139]
从图1和图3中的图示可以看出,已经成功地使用3d真实pet数据对三个不同计数级别、从低到高的噪声级别实现根据所描述的方式的实现。在图示的示例中,已经通过map正则化使用噪声补偿实现了该方式,并且对于mri的情况则是引导map正则化(其中在先验中使用结构图像——由自举交叉目标控制正则化级别)。
[0140]
应当理解,也可以在2d和4d成像方法中实现该方式。
[0141]
将进一步理解,所描述的方式能够应用于存在参数估计并且数据中的噪声是性能限制因素的任何逆问题。商业应用的主要示例包括医学成像,特别是:pet或spect扫描仪:用于癌症、心脏和大脑的临床和临床前成像重建,其中有限的扫描时间和有限的注射活动导致计数有限(噪声)的数据;低量计算机断层扫描(ct):在数据质量较低时重建解剖图像、
血管造影图像(以减少辐射暴露或用于快速动态成像);以及低信噪比(snr)的磁共振成像(mri)序列:一些mr图像的信噪比有限,并因此具有噪声k空间数据。
[0142]
在医学成像之外,方式可用于任何受噪声数据影响的参数估计问题。可以应用该方式的其他领域包括:图像处理和去噪(例如照片和图像去噪、视频去噪);无损检测(例如ct和阻抗断层扫描);遥感(例如卫星成像和地震成像);天体物理学(例如多光谱成像);和安全成像(例如ct)。
[0143]
交叉验证方法[3]和自举过滤方法[4]是已知的。已知的方法依赖于交叉验证作为停止标准——这意味着结果容易受到空间变化收敛(空间变化分辨率和噪声)的影响。较新的高级交叉验证方法[5]需要有限数量的示例噪声补偿参数的预选择,指定数据子集以进行交叉验证,然后对每个示例噪声补偿参数集进行完全重建。这导致噪声补偿参数的低选择精度,并且还取决于用于交叉验证目的的数据子集的选择。其他更高级的广义交叉验证方法[6]依赖于固定的正则化实例(例如总变化),因此不提供灵活性、适用范围和普遍适用性。自举过滤使用交叉验证停止图像的前向投影。前向投影用作生成自举样本的手段。已知方法涉及大量自举样本的重建并找到期望。
[0144]
此处描述的方式和实现与已知的方式和实现的不同在于:
[0145]
方式可以涉及只能运行一次来收敛而不包括停止标准的方法。
[0146]
方式使得自举数据集直接来自对原始测量数据的重新采样,而不是来自交叉验证的停止图像的前向投影。
[0147]
方式使得可以使用单个自举数据集而不是多个数据集或选择用于交叉验证的数据子集。
[0148]
方式使得其允许将任何去噪程序在任何或每个步骤直接嵌入到任何迭代重建算法中。方式使得其可以自适应地并且精确地为每次更新优化任何去噪的参数化。方式使得其可以自动地并且精确地为每次更新优化任何去噪的参数化。
[0149]
方式使得仅涉及一个迭代重建程序来提供精确优化的噪声消除参数,不需要进行多次重建及随后的回顾性比较,该比较通过交叉验证来自有限数量的预选噪声消除参数中的低精度选择而进行。
[0150]
应当理解,方式扩展了噪声补偿可能性的范围并且可以根据收集的数据优化其使用。噪声补偿方式可以像高斯平滑内核一样简单(其在每个迭代步骤中可以找到最佳内核宽度),也可以像高级引导平滑一样复杂(同样,根据测量数据专门优化参数化)以纳入重建。相比之下,诸如[3]和[4]中的已知方法涉及停止或单个“非线性”过滤方法,其由近似的多个自举mlem结果的平均值限定。这提供了一次性平均过程,该过程进一步受到停止图像估计的中心用途的限制,具有未知的空间变化收敛。
[0151]
本文描述的方式可以针对任何标准迭代图像重建方法实现并提供一种方法,其中例如仅一个(或多个)自举重采样数据集允许将强大的最先进的去噪算法直接嵌入到具有相对简单性的图像重建。方法提供了一种用于在每次更新时对任何去噪的强度进行自动的数据相关和精确优化的机制。
[0152]
尽管这里已经参照附图详细公开了本发明的说明性实施例,但是应当理解,本发明不限于精确的实施例,并且在不脱离由所附权利要求及其等同物限定的本发明范围的情况下,本领域技术人员可以在其中进行各种改变和修改。
[0153]
参考文献
[0154]
[1]a.r.de pierro(1995)a modified expectation maximization algorithm for penalized likelihood estimation in emission tomography,ieee trans.med.imaging,vol.14,no.1,pp.132
‑
137.
[0155]
[2]j.e.bowsher et al(2004)utilizing mri information to estimate f18
‑
fdg distributions in rat flank tumors,ieee nucl.sci.symp.conf.rec.,vol.4,2004,pp.2488
‑
2492.
[0156]
[3]coakley,k.j.(1991),a cross
‑
validation procedure for stopping the em algorithm and deconvolution of neutron depth profiling spectra ieee transactions on nuclear science volume:38,issue:1.
[0157]
[4]coakley,k.j.(1996),bootstrap method for nonlinear filtering of em
‑
ml reconstructions of pet images.int.j.imaging syst.technol.,7:54
‑
61.doi:10.1002/(sici)1098
‑
1098(199621)7:1<54::aid
‑
ima7>3.0.co;2
‑
t.
[0158]
[5]zhang et al(2017)regularization parameter selection for penalized
‑
likelihood list
‑
mode image reconstruction in petphys.med.biol.62 5114.
[0159]
[6]xiongjun zhang,bahram javidi,and michael k.ng(2017),automatic regularization parameter selection by generalized cross
‑
validation for total variational poisson noise removal applied optics vol.56,issue 9,pp.d47
‑
d51.
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。