1.本公开涉及理疗设备领域,尤其涉及一种机械臂位置的动图动态展示方法和控制终端以及智能人体经络调理设备。
背景技术:
2.智能人体经络调理设备是依据中医经络疏通、调节原理,通过前沿人工智能技术、机器人技术、再结合精密伺服控制技术和多物理场能量刺激技术,集成实现的可代替人工手法的智能化设备。
3.现有技术中,在使用中医经络调理设备对人体进行调理时,是通过机器人的机械臂末端携带调理设备进行的,虽然机械臂可以根据规划的轨迹进行行走以及可以展示机械臂末端在人体的位置,但是并没有展示机械臂末端和人体的相对位置信息,以及没有展示机械臂末端在规划轨迹中的位置信息;更有甚至,仅仅展示患者人体的3d模型。这就导致虽然机械臂根据前端动图模拟轨迹进行行走,但是无法得到机械臂末端和人体之间的相对位置信息来进行精准位置反馈,其不能精确反映机械臂在人体中的实时状态。
4.此外,若是没有机械臂末端和人体之间的相对位置信息,现有中医经络调理设备展示的动图就缺乏机械臂末端与人体体表之间的相对位置信息等,这就使得展示的动图上得不到机械臂末端与人体体表之间的距离反馈,容易使得机械臂末端过度对体表施加力量,造成人体体表受伤、为患者带来安全隐患的危险。
5.因此,现有技术中的中医经络调理设备展示的动图存在如下技术缺陷:
6.中医经络调理设备的展示动图中,没有机械臂末端和人体之间的相对位置信息的反馈信息展示,使得机械臂末端缺乏动图动态展示信号而容易对人体体表带来安全隐患的技术缺陷。
技术实现要素:
7.有鉴于此,本公开提出了一种机械臂位置的动图动态展示方法和控制终端以及一种智能人体经络调理设备,旨在根据获取机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据,建立机械臂末端和人体之间的相对位置信息的反馈信息并展示,以此使得理疗设备具备实时的动图动态展示信息而较好地控制机械臂行走,避免机械臂末端缺乏动图动态展示信号而对人体体表带来安全隐患。
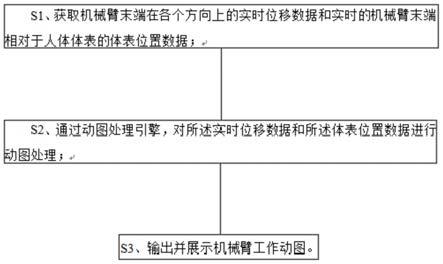
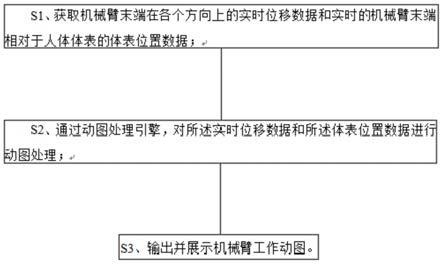
8.根据本公开的一方面,提供了一种机械臂位置的动图动态展示方法,包括如下步骤:
9.s1、获取机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据;
10.s2、通过动图处理引擎,对所述实时位移数据和所述体表位置数据进行动图处理;
11.s3、输出并展示机械臂工作动图。
12.在一种可能的实现方式中,
13.步骤s1中,在获取所述实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据之后,还包括:
14.对所述实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据进行解析;
15.获得实时位移解析数据和实时的机械臂末端相对于人体体表的体表位置解析数据;
16.接收并发送所述实时位移解析数据和实时的机械臂末端相对于人体体表的体表位置解析数据。
17.在一种可能的实现方式中,
18.在步骤s1中,所述获取机械臂末端在各个方向上的实时位移数据,包括:
19.获取机械臂末端在世界坐标中的坐标值大小数据,包括(x,y,z),其中:
20.x为机械臂末端在世界坐标系x方向上的位置坐标值大小;
21.y为机械臂末端在世界坐标系y方向上的位置坐标值大小;
22.z为机械臂末端在世界坐标系z方向上的位置坐标值大小。
23.在一种可能的实现方式中,
24.还包括:
25.获取机械臂末端在世界坐标中的转角数据,包括(rx,ry,rz),其中:
26.rx为机械臂末端在世界坐标系x方向上的转角大小;
27.ry为机械臂末端在世界坐标系y方向上的转角大小;
28.rz为机械臂末端在世界坐标系z方向上的转角大小。
29.在一种可能的实现方式中,
30.还包括:
31.获取机械臂末端在世界坐标中的转角轴数据,包括(r1,r2,r3,r4,r5,r6),其中:
32.r1为机械臂第一个转角轴的角度;
33.r2为机械臂第二个转角轴的角度;
34.r3为机械臂第三个转角轴的角度;
35.r4为机械臂第四个转角轴的角度;
36.r5为机械臂第五个转角轴的角度;
37.r6为机械臂第六个转角轴的角度。
38.在一种可能的实现方式中,
39.在步骤s1中,所述获取实时的机械臂末端相对于人体体表的体表位置数据,包括:
40.获取机械臂末端在各个方向上的实时位移数据和人体体表点云数据;
41.结合所述实时位移数据和所述人体体表点云数据,计算并获取机械臂末端相对于人体体表的动图动态展示数据;
42.根据所述动图动态展示数据输出并展示模拟动图。
43.在一种可能的实现方式中,
44.还包括:
45.获取人体体表点云数据;
46.根据所述人体体表点云数据建立行走轨迹;
47.基于所述实时位移数据对所述行走轨迹进行位置反馈,获取实时反馈结果。
48.在一种可能的实现方式中,
49.还包括:
50.接收所述实时反馈结果;
51.将所述实时反馈结果输入动图处理引擎。
52.根据本公开的另一方面,提供了一种控制终端,包括:
53.处理器;
54.用于存储处理器可执行指令的存储器;
55.其中,所述处理器被配置为执行所述可执行指令时实现所述的具备力感知反馈调节的机械臂控制方法。
56.根据本公开的另一方面,还提供了一种智能人体经络调理设备,包括机械臂和所述的控制终端,所述控制终端与所述机械臂的控制器电性连接。
57.本技术通过获取人体体表点云数据,根据所述人体体表点云数据建立行走轨迹;获取机械臂末端在各个方向上的实时位移数据,根据所述实时位移数据对所述行走轨迹进行矫正反馈,获取实时矫正反馈结果;根据所述实时矫正反馈结果执行运动指令;达到了对机械臂的行走轨迹进行实时矫正反馈调节的技术效果,使得机械臂末端的的行走轨迹得到精准矫正,机械臂末端能够根据人体体表特征进行施力行走,以此避免了机械臂对人体造成安全隐患的发生。
58.本发明根据获取机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据,建立机械臂末端和人体之间的相对位置信息的反馈信息并展示,以此使得理疗设备具备实时的动图动态展示信息而较好地控制机械臂行走,避免机械臂末端缺乏动图动态展示信号而对人体体表带来安全隐患。
59.根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
60.包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
61.图1示出为本发明机械臂位置的动图动态展示的实施流程示意图;
62.图2示出为本发明控制终端的组成示意图;
63.图3示出为本发明智能人体经络调理设备的结构示意图;
64.附图标记列表:1、机械臂,2、ai视觉系统,3、振动调理头,4、浮动调理床;
具体实施方式
65.以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
66.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
67.另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
68.实施例1
69.如图1所示,根据本公开的一方面,提供了一种机械臂位置的动图动态展示方法,包括如下步骤:
70.s1、获取机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据;
71.本发明根据机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据,建立机械臂末端和人体之间的相对位置信息的反馈信息并展示,以此使得理疗设备具备实时的动图动态展示信息而较好地控制机械臂行走;
72.因此,需要获取机械臂末端在各个方向上的实时位移数据,以此获知机械臂末端的动态位置数据,具体的,可以由控制终端和机械臂控制器tcp/ip连接,以此获取机械臂末端的行走数据;
73.此外,还可以利用传感器等来获取机械臂末端在各个方向上的实时位移数据,比如转角传感器、位移传感器等;
74.本实施例,实时位移数据包括机械臂末端在世界坐标中的坐标值大小数据、机械臂末端在世界坐标中的转角数据和机械臂末端在世界坐标中的转角轴数据,优选采用各自对应的传感器进行数据提取的方式进行收集数据;
75.动态图的展示,除了上述时位移数据展示的机械臂末端动态模拟轨迹,还需要结合实时的机械臂末端相对于人体体表的体表位置数据,以此才能得到机械臂末端相对于人体体表之间的距离展示数据,从而以此数据建立动态的实时动图动态展示结果,通过这样就可以在3d引擎上,展示机械臂末端相对于人体体表运动的动态数据。
76.s2、通过动图处理引擎,对所述实时位移数据和所述体表位置数据进行动图处理;
77.在获取到机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据后,通过3d引擎处理数据:
78.将机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据输入实时数据,经过系统解析、分析并计算后,进行建模等,就可以仿真计算展示人体、机械臂、工作环境以及机械臂行相对于人体行走的轨迹动图。
79.s3、输出并展示机械臂工作动图。
80.这样,通过上述实施例的实施,本实施例通过获取人体体表点云数据,根据所述人体体表点云数据建立行走轨迹;获取机械臂末端在各个方向上的实时位移数据,根据所述实时位移数据对所述行走轨迹进行矫正反馈,获取实时矫正反馈结果;根据所述实时矫正反馈结果执行运动指令;达到了对机械臂的行走轨迹进行实时矫正反馈调节的技术效果,使得机械臂末端的的行走轨迹得到精准矫正,机械臂末端能够根据人体体表特征进行施力行走,以此避免了机械臂对人体造成安全隐患的发生。
81.通过获取的机械臂末端在各个方向上的实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据,建立机械臂末端和人体之间的相对位置信息的反馈信息并展示,以此使得理疗设备具备实时的动图动态展示信息而较好地控制机械臂行走,避免机械
臂末端缺乏动图动态展示信号而对人体体表带来安全隐患。
82.需要说明的是,尽管以3d引擎、tcp/ip端口等作为示例介绍了如上通信方式,但本领域技术人员能够理解,本公开应不限于此。事实上,用户完全可根据个人喜好和/或实际应用场景灵活设定动图处理引擎工具,只要可以接收数据进行建模、仿真展示人体、机械臂、工作环境以及机械臂行相对于人体行走的轨迹动图即可。
83.获取所述实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据后,为了便于直观数据和分析统计,需要对数据解析,获得解析数据,便于后期进行数据分析。
84.在一种可能的实现方式中,
85.步骤s1中,在获取所述实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据之后,还包括:
86.对所述实时位移数据和实时的机械臂末端相对于人体体表的体表位置数据进行解析;
87.获得实时位移解析数据和实时的机械臂末端相对于人体体表的体表位置解析数据;
88.接收并发送所述实时位移解析数据和实时的机械臂末端相对于人体体表的体表位置解析数据。
89.解析后,将解析后的实时位移解析数据和实时的机械臂末端相对于人体体表的体表位置解析数据输入引擎,便于直接运算。
90.数据解析的技术可以由用户选择,在此不做限制。
91.本技术获取的实时位移数据,包括机械臂末端在世界坐标中的坐标值大小数据、在世界坐标中的转角数据和在世界坐标中的转角轴数据,对应的数据由控制终端从机械臂控制器的tcp/ip数据端口获取,或者利用对应的传感器等来获取机械臂末端在各个方向上的实时位移数据即可,比如转角传感器、位移传感器等;
92.在一种可能的实现方式中,
93.在步骤s1中,所述获取机械臂末端在各个方向上的实时位移数据,包括:
94.获取机械臂末端在世界坐标中的坐标值大小数据,包括(x,y,z),其中:
95.x为机械臂末端在世界坐标系x方向上的位置坐标值大小;
96.y为机械臂末端在世界坐标系y方向上的位置坐标值大小;
97.z为机械臂末端在世界坐标系z方向上的位置坐标值大小。
98.坐标值大小数据(x,y,z)的数据值可以由控制终端进行实时获取并计算。
99.在一种可能的实现方式中,
100.还包括:
101.获取机械臂末端在世界坐标中的转角数据,包括(rx,ry,rz),其中:
102.rx为机械臂末端在世界坐标系x方向上的转角大小;
103.ry为机械臂末端在世界坐标系y方向上的转角大小;
104.rz为机械臂末端在世界坐标系z方向上的转角大小。
105.在一种可能的实现方式中,
106.还包括:
107.获取机械臂末端在世界坐标中的转角轴数据,包括(r1,r2,r3,r4,r5,r6),其中:
108.r1为机械臂第一个转角轴的角度;
109.r2为机械臂第二个转角轴的角度;
110.r3为机械臂第三个转角轴的角度;
111.r4为机械臂第四个转角轴的角度;
112.r5为机械臂第五个转角轴的角度;
113.r6为机械臂第六个转角轴的角度。
114.同理,转角数据(rx,ry,rz)和转角轴数据(r1,r2,r3,r4,r5,r6),可由如转角传感器等采集,可以由控制终端进行实时获取并计算。
115.在获取到机械臂末端在各个方向上的实时位移数据后,仅仅展示机械臂末端的动态图,本公开还需要动态展示机械臂末端相对人体体表的运动动图,因此还要获取实时的机械臂末端相对于人体体表的体表位置数据,结合体表位置数据,来结合展示机械臂末端相对于人体体表的运动参数。
116.在一种可能的实现方式中,
117.在步骤s1中,所述获取实时的机械臂末端相对于人体体表的体表位置数据,包括:
118.获取机械臂末端在各个方向上的实时位移数据和人体体表点云数据;
119.机械臂末端在各个方向上的实时位移数据见上述所述;
120.人体体表点云数据可以由摄像机或者通过点云传感器获取,还可以通过ai视角识别系统获取;
121.获取到实时位移数据和人体体表点云数据后,将实时位移数据和人体体表点云数据解析并发送至系统进行运算,
122.结合所述实时位移数据和所述人体体表点云数据,计算并获取机械臂末端相对于人体体表的动图动态展示数据;
123.根据所述动图动态展示数据输出并展示模拟动图。
124.在展示模拟动图后,可以在动图上展示机械臂末端在运动时和人体体表之间的相对运动模拟动图,这样可以直观地观看机械臂末端在理疗人体时的位置运动轨迹,可以避免伤害皮肤。
125.在一种可能的实现方式中,
126.还包括:
127.获取人体体表点云数据;
128.根据所述人体体表点云数据建立行走轨迹;
129.基于所述实时位移数据对所述行走轨迹进行位置反馈,获取实时反馈结果。
130.在本实施例的一种应用方案中,本实施例增加了结合人体体表点云数据的运动轨迹反馈方案,通过ai视角识别系统获取人体体表点云数据,以此建立由轨迹(穴位)点组成的行走轨迹图,便于和机械臂末端的行走位置数据进行匹配;
131.结合获取的机械臂末端的实时位移数据,与所述行走轨迹进行对比,看每一处机械臂末端所处的位置点和行走轨迹对应的轨迹点之间的距离是否处于安全距离中,通过数据对比计算,可以得到位置反馈信息,比如进行距离差计算,看是否超过一定值(用户设定即可),获取实时反馈结果后进行反馈调节。
132.在一种可能的实现方式中,
133.还包括:
134.接收所述实时反馈结果;
135.将所述实时反馈结果输入动图处理引擎。
136.在输出动图时,可以将所述实时反馈结果输入引擎进行计算,以此对动图中的数据点进行位置数据调节。当机械臂末端行走的位置点出现偏差,由反馈结果进行数据调节,拨正机械臂末端的实时位移数据。
137.实施例2
138.本实施例,提供一种控制终端,用于和智能人体经络调理设备的机械臂控制系统进行连接而通信,便于远程控制机械臂的动作。
139.控制终端与机械臂控制器的tcp/ip端口连接,通过tcp/ip的链接,获取实时的机械臂力状态数据以及机械臂末端在人体的位置数据。
140.如图2所示,根据本公开的另一方面,提供了一种控制终端,包括:
141.处理器;
142.用于存储处理器可执行指令的存储器;
143.其中,所述处理器被配置为执行所述可执行指令时实现所述的机械臂位置的动图动态展示方法。
144.本公开实施例控制终端包括处理器以及用于存储处理器可执行指令的存储器。其中,处理器被配置为执行可执行指令时实现前面所述的机械臂位置的动图动态展示方法。
145.此处,应当指出的是,处理器的个数可以为一个或多个。同时,在本公开实施例的控制终端中,还可以包括输入装置和输出装置。其中,处理器、存储器、输入装置和输出装置之间可以通过总线连接,也可以通过其他方式连接,此处不进行具体限定。
146.存储器作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序和各种模块,如:本公开实施例的具备力感知反馈调节的机械臂控制方法所对应的程序或模块。处理器通过运行存储在存储器中的软件程序或模块,从而执行控制终端的各种功能应用及数据处理。
147.输入装置可用于接收输入的数字或信号。其中,信号可以为产生与设备/终端/服务器的用户设置以及功能控制有关的键信号。输出装置可以包括显示屏等显示设备。
148.需要说明的是,尽管以tcp/ip端口作为示例介绍了如上通信方式,但本领域技术人员能够理解,本公开应不限于此。事实上,用户完全可根据个人喜好和/或实际应用场景灵活设定通信方式如总线,只要可以接收来自机械臂控制器的数据即可。
149.实施例3
150.根据本公开的另一方面,还提供了一种智能人体经络调理设备,包括机械臂和所述的控制终端,所述控制终端与所述机械臂的控制器电性连接。
151.如图3所示,本实施例提供的智能人体经络调理设备,包括机械臂1和所述的控制终端,机械臂1和控制终端按照实施例1所述的方案进行控制、执行。
152.机械臂具备控制系统,可以和控制终端进行通信;
153.本实施例的智能人体经络调理设备,除了一对机械臂1,还包括ai视觉系统2、振动调理头3和浮动调理床4组成,ai视觉系统2用于识别经络、振动调理头3用于振动击打经络穴位点等,浮动调理床4用于患者躺下,可以调节空间位置。使用过程如下:
154.患者做中医设备调理时,仰卧或俯卧在浮动调理床4上;
155.由四个摄像头组成的ai视觉系统2快速识别出人体正面或背面的经络路径,并经过插值规划后传递给机械臂1,本技术的机械臂1为双臂机器人;
156.再由双臂机器人携带振动调理头3循经精准运行;
157.达到疏通经络、激活人体机能、调控人体之功能。
158.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。