技术特征:
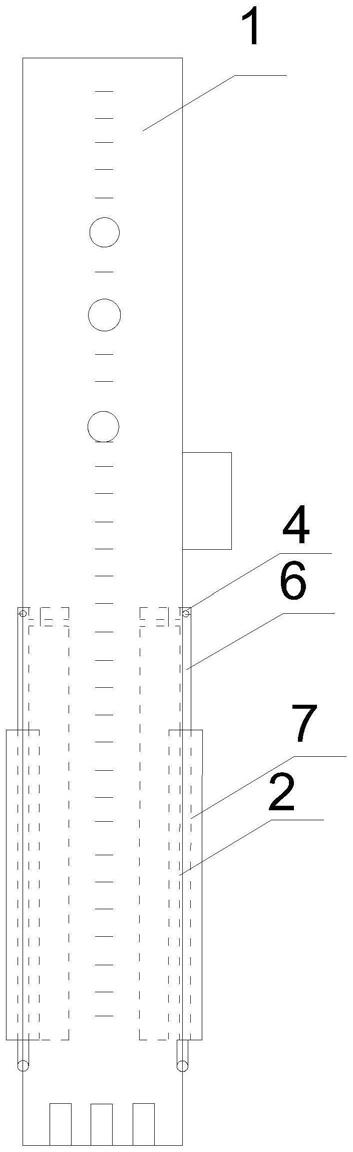
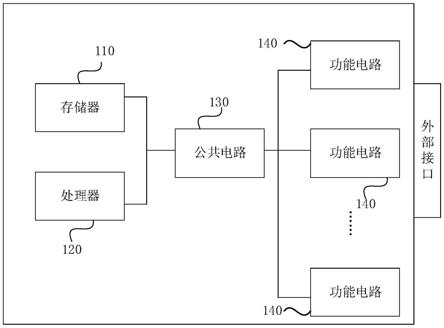
1.水准尺的调平装置,其特征在于:包括尺身、第一可伸缩支撑杆、第一测距传感器、第一测量装置和嵌入式系统,所述第一可伸缩支撑杆通过第一连接件与尺身相连,所述第一可伸缩支撑杆包括第一电机和第一伸缩装置,所述第一电机驱动第一伸缩装置伸缩,或者所述第一可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,所述第一测量装置位于第一可伸缩支撑杆内或者位于第一电机内用于检测第一可伸缩支撑杆的伸缩量或者长度,在尺身底端和靠近第一可伸缩支撑杆与尺身相连处之间有可转动的第一测距传感器,所述第一测距传感器位于尺身上,第一测距传感器用于测量从第一测距传感器所在点发出的激光到达第一可伸缩支撑杆之间的水平距离,嵌入式系统获取第一测距传测感器和第一测量装置的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆的长度,从而控制第一可伸缩支撑杆的伸缩。2.根据权利要求1所述的水准尺的调平装置,其特征在于:所述第一测量装置为第一长度传感器或者第一位移传感器,第一长度传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的长度;第一位移传感器位于第一可伸缩支撑杆内用于检测第一可伸缩支撑杆的伸缩量;或者第一测量装置包括第一角度传感器或者第一圈数传感器,所述第一角度传感器或第一圈数传感器位于第一电机内,分别用于测量第一电机转动的角度,或者第一电机转速已知的,从而推导出第一电机转动的圈数、伸缩距离与时间的关系,第一角度传感器或第一圈数传感器由定时器控制第一电机转动时间,从而控制第一可伸缩杆的伸缩量。3.据权利要求2所述的水准尺的调平装置,其特征在于:还包括第二可伸缩支撑杆、第二测距传感器和第二测量装置,所述第二可伸缩支撑杆通过第二连接件与尺身相连,所述第二可伸缩支撑杆包括第二电机和第二伸缩装置,所述第二电机带动第二伸缩装置伸缩,或者所述第二可伸缩支撑杆包括可相对伸缩的第一液压系统或第一气压系统,所述第二测量装置位于第二可伸缩支撑杆内或者位于第二电机内用于检测第二可伸缩支撑杆的长度,在尺身底端和靠近第二可伸缩支撑杆与尺身相连处之间有可转动的第二测距传感器,所述第二测距传感器安装在尺身正面或者背面且靠近尺身长度方向边缘,第二测距传感器用于测量从第二测距传感器所在点发出的激光到达第二可伸缩支撑杆之间的水平距离,嵌入式系统获取第二测距传感器和第二测量装置的数据并计算出在尺身处于垂直状态下的第二可伸缩支撑杆的长度,从而控制第二可伸缩支撑杆的伸缩。4.根据权利要求3所述的水准尺的调平装置,其特征在于:所述第二测量装置包括第二长度传感器或者第二位移传感器,第二长度传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量或长度;第二位移传感器位于第二可伸缩支撑杆内用于检测第二可伸缩支撑杆的伸缩量;或者第二测量装置包括第二角度传感器或者第二圈数传感器,所述第二角度传感器或第二圈数传感器位于第二电机内,分别用于测量第二电机转动的角度,或者第二电机转速已知的,从而推导出第二电机转动的圈数、伸缩距离与时间的关系,第二角度传感器或第二圈数传感器由定时器控制第二电机转动时间,从而控制第二可伸缩杆的伸缩量。5.根据权利要求4所述的水准尺的调平装置,其特征在于:还包括第一、第二万向轮,第一、第二万向轮分别安装在第一、第二可伸缩支撑杆的末端,第一万向轮内置第三电机、第一方向传感器,第二万向轮内置第四电机、第二方向传感器,嵌入式系统获取第一、第二方向传感器的数据,经计算控制第三、第四电机的转动,从而控制万向轮的滚动方向。
6.根据权利要求5所述的水准尺的调平装置,其特征在于:所述第一连接件、第二连接件位于尺身的中上部,所述第一伸缩装置包括第一固定杆和第一伸缩杆,第一固定杆和第一伸缩杆可相对伸缩的连接,所述第一电机带动第一固定杆或者第一伸缩杆使第一固定杆与第一伸缩杆可相对伸缩,所述第二伸缩装置包括第二固定杆和第二伸缩杆,第二固定杆和第二伸缩杆可相对伸缩的连接,所述第二电机带动第二固定杆或者第二伸缩杆使第二固定杆与第二伸缩杆可相对伸缩,第一、第二伸缩杆上分别有第一、第二直齿轮,第一固定杆套接在第一伸缩杆上,第二固定杆套接在第二伸缩杆上,第一、第二电机分别固定在第一、第二固定杆的内壁上,第一、第二电机上分别有第一、第二轴齿,第一、第二电机上的轴齿分别与第一、第二直齿轮紧密啮合,第一、第二电机转动时会带动第一、第二轴齿转动,第一、第二轴齿带动第一、第二直齿轮做伸缩运动。7.根据权利要求6所述的水准尺的调平装置,其特征在于:所述第一连接件包括第一、第二横杆,第一横杆的一端套接于第二横杆,第一横杆另一端与尺身相连,第二横杆的另一端与第一可伸缩支撑杆的第一伸缩杆相连接,第一、第二横杆之间可以伸缩且第二横杆可绕第一横杆360度转动。8.根据权利要求7所述的水准尺的调平装置,其特征在于:还包括尺垫,尺垫包括上转盘,上转盘上固定有套筒,所述套筒底部是四周围起来的,在四周的四边缘向上沿伸围片,用于包裹住尺身的四边缘,所述尺身固定于套筒内,在尺身下部开有多个柱孔,在上转盘上固定有凸柱,尺垫上转盘上的凸柱和柱孔相咬合,多个柱孔与凸柱紧密配合,在上转盘上的凸柱下表面设置有控制接头和电源接头与尺身上的柱孔上表面接口相连。9.水准尺的调平装置,其特征在于:包括尺身、第三可伸缩支撑杆、第三测量装置、第三测距传感器、陀螺仪和嵌入式系统,所述第三可伸缩支撑杆通过第三连接件与尺身相连,所述第三可伸缩支撑杆包括第八电机和第三伸缩装置,所述第八电机驱动第三伸缩装置伸缩,或者所述第三可伸缩支撑杆包括可相对伸缩的第三液压系统或第三气压系统。第三测量装置位于第三可伸缩支撑杆内或者第八电机内用于检测第三可伸缩支撑杆的长度,在尺身底端和靠近第三可伸缩支撑杆与尺身相连处之间有与尺身始终垂直且可沿尺身的垂直面转动的第三测距传感器,所述第三测距传感器位于尺身上,用于测量从第三测距传感器所在点发出的垂直于尺身的激光到达第三可伸缩支撑杆之间的距离,嵌入式系统获取第三测量装置、第三测距传感器和陀螺仪的数据并计算出在尺身处于垂直状态下的第三可伸缩支撑杆的长度,从而控制第三可伸缩支撑杆的伸缩。10.水准尺的调平方法,其特征在于:包括如下步骤:嵌入式系统获取第一测距传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。11.水准尺的调平方法,其特征在于:包括如下步骤:嵌入式系统获取第一测距传感器、陀螺仪或倾角传感器和第一测量装置的数据,计算得到第一可伸缩支撑杆的长度,进而控制第一可伸缩支撑杆做伸缩运动,实现尺身处于垂直状态,实现可伸缩支撑杆调平。
技术总结
本发明涉及一种水准尺的调平装置和调平方法,第一可伸缩支撑杆通过第一连接件与尺身相连,它包括第一电机和第一伸缩装置,第一测量装置位于第一可伸缩支撑杆内或者位于第一电机内用于检测第一可伸缩支撑杆的伸缩量或者长度,在尺身底端和靠近第一可伸缩支撑杆与尺身相连处之间有可转动的第一测距传感器,第一测距传感器用于测量从第一测距传感器所在点发出的激光到达第一可伸缩支撑杆之间的水平距离,嵌入式系统获取第一测距传感器和第一测量装置的数据并计算出在尺身处于垂直状态下的第一可伸缩支撑杆的长度,从而控制第一可伸缩支撑杆的伸缩。嵌入式系统可以有效控制完成尺身调平问题,解决了传统尺子调平速度慢的问题。问题。问题。
技术研发人员:何丽 岳翎 程和平 李月琴 白佳文 金成宏 辛富先 陈妍
受保护的技术使用者:何丽
技术研发日:2021.10.21
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。