1.本发明涉及永磁同步电机控制领域,具体地涉及一种永磁同步电机驱动系统最大再生制动转矩优化控制方法。
背景技术:
2.永磁电机具有储能密度高、功率密度大和使用寿命长的特点,被广泛的应用于新能源汽车驱动、飞轮储能等领域。永磁电机驱动系统包括永磁电机和电机控制器两部分,共同完成机电能量的转换过程。按照能量流的流向不同,其工作过程可以分为两种情况,分别为:电动运行,对应电能到机械能的转换过程,永磁电机驱动系统从电源侧吸收电能并转换为机械能后通过电机轴系输出,实现电机的升速;再生制动运行,对应机械能到电能的转换过程,永磁电机驱动系统将机械能转换为电能回馈电源侧,实现电机的减速制动。因此,再生制动是上述应用中电机驱动系统的一种典型工况,为实现最佳的制动效果,制动时间的长短是代表制动效能的一项核心指标,通过控制制动转矩t
e
最大可以实现最大的制动加速度,进而实现最短的制动时间。针对永磁电机驱动系统而言,为实现最大制动转矩的控制,需要解决两个方面的问题:确定最大制动转矩指令值,根据最大制动转矩指令值计算对应的电流指令值并完成电流的闭环控制。
3.永磁电机驱动系统的制动转矩的上限由电机控制器容量及电机转矩外特性共同决定,在不同转速下有不同的取值。由于电机控制器的容量直接决定电机控制器的价格,考虑到实际应用中的经济性因素,永磁电机驱动系统中电机控制器的容量不可能无限大,因此,进行系统最大制动转矩设计时必须充分考虑电机控制器容量这一重要因素。现有技术中,最大制动转矩一般被设定为一个固定的预设值,该值通常按照电机的转矩外特性进行选取,很多时候为简化控制,选择一个不随转速的变化而改变的转矩值作为最大制动转矩的预设值。比如,专利cn201810682263“电动汽车的再生制动方法及系统”设计了一种根据再生制动能量回收比例以及预设电机最大再生制动转矩确定实际电机最大再生制动转矩的方法,处于方法简便的考虑,所预设的电机最大再生制动转矩综合了不同转速时的电机转矩输出能力,给出的最大再生制动转矩预设值偏保守,一方面不能充分利用电机的性能,另一方面,由于未考虑电机控制器容量对最大再生制动转矩选取的影响,所提方法在最大制动转矩设置方面具有较大的局限性。
4.在对永磁同步电机进行控制时,一般采用最大转矩电流比控制律对电机的驱动电流和转矩进行优化匹配,由于电机输出转矩除与驱动电流相关外,还受到电机电感的影响,在实际运行中,电机的d、q轴电感的数值与电机的驱动电流和绕组温度均存在非线性关联,测量难度很大,因此,一般通过对“转矩
‑
电流”进行标定来实现驱动电流与转矩的最优匹配。现有技术中,上述过程一般采用人工离线标定的方式进行。具体的,首先使电机运行在一个选定的低于电机额定转速的恒转矩区转速,然后在这个转速点给定电流幅值,电流幅值的给定方式是把峰值电流以一定的步长划分为若干等份,然后从小到大间隔这个固定的步长通过后台给定电流幅值;在每一个固定的给定电流幅值下,通过调节后台给定电流幅
值对应的角度,通过转矩传感器测量电机输出转矩的变化,通过后台实时调整给定角度并记录下电机在此电流幅值处输出最大转矩时的电流角度,统计出每个电流幅值下记录的最佳角度,记录相应的转矩及电流的数值;改变转速并重复上述过程,最终得到“转矩
‑
转速
‑
电流”三维数据表,将表格写入程序中,实际运行时根据转矩和转速通过查表的方式得到电流值,作为电机电流内环的控制指令,实现对永磁电机转矩的控制。前述“转矩
‑
转速
‑
电流”表的准确性直接影响了永磁电机的转矩输出能力,如转矩准确性、最大转矩输出,甚至可能影响电机控制器正常工作,严重时甚至会影响电机系统的稳定运行。三维表格较为复杂,实用性较差,作为技术上的改进,专利201811184414“一种基于永磁电机参数表的电流i
d
、i
q
表的自动生成方法”提出一种提供了一种基于永磁电机参数表的电流i
d
、i
q
的二维表格的自动生成方法。专利201911092314.8“一种内嵌永磁同步电机的矢量控制及弱磁方法和系统”解决了现有控制中二维查表占用计算资源的问题,提出基于一维查表实现矢量控制混合弱磁控制。总的来讲,现有的基于查表进行转矩控制的方法,其表格的获取周期长、获取效率低,为测量转矩需要专用的转矩传感器进行辅助,且获得的数据表仅适合被测试的特定款电机,更换电机后需要再次实测;基于表格的转矩控制精度与表格的步长有关,工程上需要在表格的复杂度和控制精度之间平衡,因此,基于表格类的方法精度不高,不能够最大化利用电机性能。
5.因此,如何提供一种永磁同步电机再生制动转矩优化控制方法,综合电机外特性和电机控制器容量两种约束,完成电机全转速范围内最大的制动转矩指令值的设计;设计与所获取的最大制动转矩对应的电流指令值的实时计算方法并完成制动转矩的精确控制,且所提方法的转矩控制精度不受电机运行过程中电感等参数变化的影响,是本领域技术人员亟待解决的技术难题。
技术实现要素:
6.本发明的目的是设计一种基于对永磁同步电机驱动系统的单位功率因数控制实现对电机制动转矩优化控制的方法,通过施加无功功率为零的控制实现电机控制器容量的最大化利用,在综合考虑电机t
‑
ω外特性对于最大制动转矩约束的基础上,实现对全转速范围内电机最大制动转矩的实时获取;充分考虑电机运行过程中电感l
d
、l
q
随电流值的变化而实时变化的因素,通过在线计算的方式完成与最大制动转矩对应的电流指令值计算,实现对最大制动转矩的精确控制。所提转矩优化控制方法可以实现永磁同步电机的最大制动加速度,进而获得最佳的制动效果,所提方法采用基于在线计算的方式实时进行,控制实时性好,且具有不需要进行繁琐耗时的离线标定、控制精度不受永磁同步电机电感变化影响的特点,较现有技术具有明显的优势。
7.为了达到上述目的,本发明实施例提供一种永磁同步电机最大再生制动转矩优化控制方法,所述方法在电机控制器的主控单元中完成。
8.所述的控制方法包括:
9.过程一:以永磁同步电机的t
‑
ω外特性及电机控制器的容量共同作为约束条件,完成永磁同步电机驱动系统的最大制动转矩指令值的求解,得到的最大制动转矩指令值随电机角速度的变化进行自动更新;
10.过程二:通过对永磁同步电机的单位功率因数控制律的设计以及电机电感l
d
、l
q
随
电流i
d
、i
q
变化规律的求解,基于在线计算的方式实现了与最大制动转矩对应的电流指令值的实时计算,完成对永磁电机驱动系统最大制动转矩的精确控制,在全转速范围内实现对最大制动转矩的优化控制。
11.所述控制方法无需依赖于辅助的转矩传感器且不需要繁琐、耗时的离线标定过程,所提的最大转矩优化控制方法通过在线计算的方式进行,对转矩及电流的控制实时性好,控制精度不受永磁同步电机运行过程中电感变化的影响,可以在全转速范围内实现对永磁电机驱动系统最大制动转矩的精确控制。
12.进一步的,所述过程一包括以下步骤:
13.步骤1:以控制器容量为约束条件计算电机的最大制动转矩
14.根据控制器容量s求解电机最大制动转矩t
ec
,表达式为:
[0015][0016]
其中,s为电机控制器的容量,单位为kva;t
ec
为以控制器容量为约束条件得到的电机的最大制动转矩,ω为电机的机械角速度;
[0017]
步骤2:以永磁同步电机的t
‑
ω外特性为约束条件计算电机的最大制动转矩
[0018]
根据已知的永磁同步电机的t
‑
ω外特性曲线,得到永磁同步电机的转矩的解析表达式如下:
[0019]
t
em
=f(ω)
[0020]
其中,t
em
为以永磁同步电机的t
‑
ω外特性为约束条件计算出来的最大的制动转矩;
[0021]
步骤3:计算得到永磁同步电机驱动系统的最大制动转矩
[0022]
综合考虑电机控制器容量和电机的t
‑
ω外特性,永磁同步电机驱动系统所能实现的最大制动转矩由所述步骤1、步骤2所得到的t
ec
和t
em
的最小值决定,表达式如下:
[0023][0024]
其中,为永磁同步电机驱动系统所能实现的最大制动转矩;ω为电机的机械角速度;
[0025]
其中,所述过程一的步骤1
‑
3中,所述ω由电机控制器通过对旋转变压器的输出信号进行实时计算得到;
[0026]
在制动过程中,电机控制器根据检测到的电机的实时机械角速度ω自动动态更新最大制动转矩指令值从而实现电机全转速范围内的最大转矩的实时计算。
[0027]
进一步的,所述过程二包括以下步骤:
[0028]
步骤1:获取基于单位功率因数控制律的永磁同步电机d、q轴电流分配律
[0029]
采用单位功率因数控制律进行d
‑
q轴电流分配获得单位功率因数电流控制律,表达式如下:
[0030][0031]
其中,i
d
、i
q
分别为定子电流的d、q轴分量;l
q
为永磁同步电机的q轴电感;为电机
转子的永磁磁链;
[0032]
步骤2:获取永磁同步电机的电感l
d
、l
q
随电流i
d
、i
q
变化的函数表达式
[0033]
永磁同步电机的定子d、q轴电感l
d
、l
q
由以下二次多项式表达:
[0034][0035]
将已知的永磁同步电机在不同i
d
、i
q
电流下的电感l
d
、l
q
的取值:
[0036]
l
d1
=f
d
(i
d1
,i
q1
),l
d2
=f
d
(i
d2
,i
q2
),
……
,l
dm
=f
d
(i
dm
,i
qm
)
[0037]
l
q1
=f
q
(i
d1
,i
q1
),l
q2
=f
q
(i
d2
,i
q2
),
……
,l
qn
=f
q
(i
dn
,i
qn
)
[0038]
分别代入上述二次多项式,并表示为如下矩阵形式:
[0039][0040][0041]
其中,m、n分别是已知的、不同i
d
、i
q
电流下l
d
、l
q
的数据点的个数;l
di
=f
d
(i
di
,i
qi
)为电流取值i
di
、i
qi
时的负载电机定子的d轴电感数值,i=1,2,
…
,m;l
qj
=f
q
(i
dj
,i
qj
)为电流取值为i
dj
、i
qj
时的负载电机定子的q轴电感数值,j=1,2,
…
,n;
[0042]
上式中,除矩阵a=[a
20 a
02 a
11 a
10 a
01 a
00
]
t
、b=[b
20 b
02 b
11 b
10 b
01 b
00
]
t
外,其他均为已知量,通过矩阵运算能得到矩阵a及矩阵b,进而得到l
d
的二次多项式的系数a
20
、a
02
、a
11
、a
10
、a
01
、a
00
,以及l
q
的二次多项式的系数b
20
、b
02
、b
11
、b
10
、b
01
、b
00
;
[0043]
通过本步骤得到了电机的电感l
d
、l
q
随电机电流i
d
、i
q
变化的函数表达式;
[0044]
步骤3:获取对应最大制动转矩的永磁同步电机的电流指令值i
d
、i
q
[0045]
永磁同步电机的转矩表达式为:
[0046][0047]
其中,t
e
为永磁同步电机的转矩;i
d
、i
q
为负载电机定子电流的d、q轴分量;l
d
、l
q
为负电机的d、q轴电感;n
p
和分别为电机转子磁极的极对数和转子永磁磁链,对于确定型号的永磁同步电机而言,两者均为常数;
[0048]
联立过程二中的步骤1
‑
3的方程如下:
[0049][0050]
将过程一的步骤3中得到的永磁同步电机驱动系统能实现的最大制动转矩代入上式,即,通过解方程得到与所述最大制动转矩所对应的电流i
d
、i
q
,分别记录为,分别记录为
[0051]
为保障永磁同步电机可以运行在恒功率工况下,将上述计算得到的与弱磁环pi调节器的输出δi
d
相加得到d轴电流的指令值即,将所述作为永磁同步电机d、q轴电流的指令值加载到电流内环上;
[0052]
步骤4:完成永磁同步电机的闭环控制
[0053]
将电机控制器的电流采样电路采样得到的永磁同步电机的三相电流采样值,经过clark、park坐标变换,得到d
‑
q轴坐标系下的电流采样值i
d
与i
q
,将步骤3中得到的永磁同步电机定子电流d、q轴分量的指令值分别与该电流采样值i
d
、i
q
作差,并通过电机控制器d、q轴电流调节器的闭环控制作用,得到电机的定子d、q轴电压指令信号u
d
、u
q
,表达式如下:
[0054][0055]
上式中,k
pd
,k
id
分别为d轴电流调节器比例系数和积分系数;k
pq
,k
iq
分别为q轴电流调节器比例系数和积分系数;
[0056]
将计算得到的所述电压指令信号u
d
、u
q
作为后级svpwm环节的输入,经过电机控制器主控单元中运行的空间矢量调制svpwm策略的运算,生成6路pwm驱动控制信号,将pwm驱动信号输出到电机控制器的功率驱动电路上,通过功率驱动电路控制三相全控桥的开通与关断,实现对永磁同步电机的闭环控制。
[0057]
综上,本发明设计并实现了一种永磁同步电机驱动系统最大再生制动转矩优化控制方法,在综合考虑永磁同步电机的t
‑
ω外特性对于最大制动转矩约束的基础上,通过对永磁同步电机单位功率因数控制律的设计实现了对电机控制器容量的最大化利用,实现了对全转速范围内永磁同步电机最大制动转矩的实时获取;通过对永磁同步电机电感l
d
、l
q
随电流i
d
、i
q
变化规律的求解,基于实时计算的方式实现了最大制动转矩所对应电流指令值的精确计算,基于电机控制器对电流的闭环控制作用,完成了对永磁电机驱动系统最大制动转矩的精确控制,实现了全转速范围内的最大制动加速度控制,达到了的最佳的制动效果。所提方法基于在线计算的方式实时进行,不需要安装辅助的转矩传感器,无需繁琐、耗时的
“
转矩
‑
电流”离线标定过程,具有控制实时性好、且控制精度不受永磁同步电机运行过程中电感变化影响的优点,所提方法在控制精度及易用性等方面较已有技术具有明显的优势。
附图说明
[0058]
图1为永磁同步电机与电机控制器的连接关系示意图;
[0059]
图2为永磁同步电机的t
‑
ω外特性曲线;
[0060]
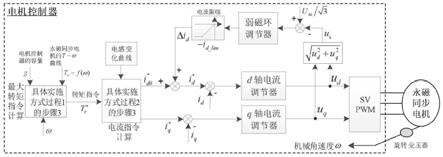
图3为永磁同步电机再生制动转矩优化控制的原理框图;
[0061]
图4为永磁同步电机d轴电感l
d
随i
d
、i
q
的变化关系曲线l
d
=f
d
(i
d
,i
q
);
[0062]
图5为永磁同步电机q轴电感l
q
随i
d
、i
q
的变化关系曲线l
q
=f
q
(i
d
,i
q
)。
具体实施方式
[0063]
以下结合附图和具体实施方式进一步说明本发明。
[0064]
本发明所述的永磁同步电机驱动系统的实施例主要包括永磁同步电机和电机控制器两部分,图1为永磁同步电机与电机控制器的连接关系示意图。如图1所示,永磁同步电机通过三相动力电缆与电机控制器连接,在永磁同步电机出线端安装有旋变,旋变的信号输出端通过旋变信号线与电机控制器的信号输入端连接,在电机控制器中完成电机转子位置和转速的测量。当永磁同步电机驱动系统工作在再生制动工况时,电机控制器控制永磁同步电机通过机械轴输出制动转矩。
[0065]
图2为永磁同步电机的t
‑
ω外特性曲线,该曲线描述了工作转速范围内电机可以输出的转矩范围。
[0066]
图3为永磁同步电机再生制动转矩优化控制的原理框图。本发明所提的永磁同步电机再生制动转矩优化控制策略包括最大制动转矩指令计算、对应最大制动转矩的电流指令计算、电流闭环控制、弱磁计算、svpwm等环节。如图3所示,用户在电机控制器中输入已知的控制器容量s及永磁同步电机的t
‑
ω外特性曲线,在电机控制器的主控单元中完成最大制动转矩指令值的计算;根据得到的最大转矩指令值,基于所推导出的单位功率因数电流控制律及电机d、q轴电感随电流变化的函数表达式,完成定子电流d、q轴分量i
d
、i
q
分配律的设计,根据最大制动转矩指令值计算得到了对应的电流指令值;通过电机控制器对电流的闭环控制作用,完成了永磁同步电机在全转速范围内的最大制动转矩的精确控制,实现了对永磁同步电机驱动系统再生制动效能的优化。
[0067]
基于前述分析,以电机控制器的容量为s、永磁同步电机具有图2所示的t
‑
ω外特性曲线为例,对本发明所提的永磁同步电机再生制动转矩优化控制方法的工作过程说明如下:
[0068]
过程1、永磁同步电机的最大制动转矩指令值的求解
[0069]
永磁同步电机驱动系统所能实现的最大制动转矩由电机控制器容量和永磁同步电机的外特性共同决定,需要综合考虑控制器容量和电机外特性的影响。
[0070]
步骤1:以控制器容量为约束条件计算电机的最大制动转矩
[0071]
通过施加无功功率为零的单位功率因数控制可以实现电机控制器容量的最大化利用,进而实现了全转速范围内电机最大制动转矩的获取,对上述方法的实现原理分析如下,
[0072]
永磁同步电机的机械方程为,
[0073]
其中,j为电机的转动惯量,ω为电机的机械角速度,t
f
为电机的负载阻力矩。
[0074]
定义电机制动过程中的加速度为a,其表达式为,
[0075]
对选定的永磁同步电机而言,其转动惯量j为常数,由上述制动加速度的表达式可以看出,制动加速度a与制动转矩t
e
成正比,控制制动转矩t
e
最大可以获得最大的制动加速度,进而实现最佳的制动效果。
[0076]
与电机配套使用的电机控制器的容量表示为s,s包括:有功功率为p和无功功率为q两部分,即,s=p q。
[0077]
制动过程中,有功功率p由永磁电机的转速ω和制动转矩t
e
的乘积决定,其计算公式为,p=ω
×
t
e
,制动功率对应为有功功率。
[0078]
联立s=p q、p=ω
×
t
e
和
[0079]
得到电机再生制动过程中加速度a的表达式:
[0080]
由上式可知,在与电机配套使用的电机控制器的容量s已知的前提下,通过控制无功功率q为零,电机控制器的容量全部用于产生制动的功率,实现了对电机控制器容量的最大化利用。
[0081]
联立s=p q、p=ω
×
t
e
、q=0,得到以电机控制器容量为约束条件的最大的制动转矩t
ec
,
[0082]
其中,s为电机控制器的容量,单位为kva;t
ec
为以控制器容量为约束条件得到的电机的最大制动转矩,ω为电机的机械角速度。
[0083]
步骤2.以永磁同步电机的t
‑
ω外特性为约束条件计算电机的最大制动转矩
[0084]
永磁同步电机驱动系统的最大制动转矩还受到永磁同步电机的输出转矩能力的影响,永磁同步电机驱动系统的转矩输出能力由电机的t
‑
ω外特性曲线描述,永磁同步电机的t
‑
ω外特性曲线由电机厂提供,一般表示为以机械角速度ω为横轴、转矩为纵轴的二维坐标系下的连续曲线,根据已知的t
‑
ω外特性曲线可以得到永磁同步电机的转矩的解析表达式为,t
em
=f(ω)。
[0085]
t
em
为以永磁同步电机的t
‑
ω外特性曲线为约束条件计算出来的最大的制动转矩。
[0086]
步骤3.计算得到永磁同步电机驱动系统的最大制动转矩
[0087]
综合考虑电机控制器容量和电机的t
‑
ω外特性,得到永磁同步电机驱动系统所能实现的最大制动转矩由上述t
ec
和t
em
的最小值决定,
[0088][0089]
其中,为永磁同步电机驱动系统所能实现的最大制动转矩;ω为电机转子的机械角速度,ω由电机控制器通过对旋转变压器输出的信号进行实时采样计算得到。
[0090]
在制动过程中,电机控制器根据检测到的电机的实时机械角速度ω自动动态更新最大制动转矩指令值基于所提方法可以实现电机全转速范围内的最大制动转矩指令值的实时计算。
[0091]
过程2、对应最大制动转矩的电流指令值计算及永磁同步电机的制动转矩的控制
[0092]
本过程主要完成永磁同步电机驱动系统最大制动转矩的控制,包括单位功率因数控制律的设计,电感l
d
、l
q
随电机定子电流i
d
、i
q
变化规律的求解,对应最大制动转矩的电流指令值计算及电流闭环控制等四个步骤。
[0093]
步骤1.获取基于单位功率因数控制律的永磁同步电机d、q轴的电流分配律
[0094]
所提方法的关键是实现无功功率q为零的控制,无功功率q为零则对应永磁同步电机驱动系统工作在单位功率因数状态,永磁同步电机单位功率因数控制率的推导过程如下,
[0095]
永磁同步电动机在d
‑
q轴坐标系下的电压方程为,
[0096][0097]
若永磁同步电动机运行在单位功率因数状态下,功率因数为1,对应的电压矢量与电流矢量夹角为0
°
,电流和电压的dq轴分量满足如下关系式,
[0098]
i
d
/i
q
=u
d
/u
q
ꢀꢀꢀ
(3)
[0099]
若只考虑稳态工况,并忽略定子电阻压降的影响,由式(2)、式(3)得,
[0100][0101]
其中,u
d
、u
q
、i
d
、i
q
分别为定子电压及定子电流的d、q轴分量;r分别为永磁同步电机的定子电阻;l
d
、l
q
为永磁同步电机的d、q轴电感;ω为电机的机械角速度;为电机转子的永磁磁链;n
p
为电机转子磁极的极对数。
[0102]
求解式(4)得到i
d
的表达式,并利用麦克劳林公式进行展开,得到永磁同步电机的单位功率因数电流控制律为,
[0103][0104]
步骤2.获取永磁同步电机的电感l
d
、l
q
随电流i
d
、i
q
变化的函数表达式
[0105]
基于最小二乘原理,完成对永磁同步电机dq轴电感l
d
、l
q
曲线的拟合,并确定拟合的二次多项式系数的取值。永磁同步电机的定子d、q轴电感l
d
、l
q
可以由二次多项式表达:
[0106][0107]
将如图4和图5所示的电感随电流变化的各组数据分别代入上述二次多项式,并表示为如下所示的矩阵形式:
[0108][0109][0110]
其中,m、n分别是已知的、不同i
d
、i
q
电流下l
d
、l
q
的数据点的个数;l
di
=f
d
(i
di
,i
qi
)为电流取值i
di
、i
qi
时的负载电机定子的d轴电感数值,i=1,2,
…
,m;l
qj
=f
q
(i
dj
,i
qj
)为电流取值为i
dj
、i
qj
时的负载电机定子的q轴电感数值,j=1,2,
…
,n。
[0111]
上式中,除矩阵a=[a
20 a
02 a
11 a
10 a
01 a
00
]
t
、b=[b
20 b
02 b
11 b
10 b
01 b
00
]
t
外,其他均为已知量,通过矩阵运算可以得到矩阵a及矩阵b,进而得到l
d
的二次多项式的系数a
20
、a
02
、a
11
、a
10
、a
01
、a
00
,以及l
q
的二次多项式的系数b
20
、b
02
、b
11
、b
10
、b
01
、b
00
。
[0112]
本步骤得到了电机的电感l
d
、l
q
随电机电流i
d
、i
q
变化的函数表达式。
[0113]
步骤3.获取对应最大制动转矩的永磁同步电机的电流指令值i
d
、i
q
[0114]
永磁同步电机的转矩表达式为,
[0115][0116]
其中,t
e
为永磁同步电机的转矩;i
d
、i
q
为负载电机定子电流的d、q轴分量;l
d
、l
q
为负载电机的d、q轴电感;n
p
和分别为电机转子磁极的极对数和转子永磁磁链,对于确定型号的永磁同步电机而言,两者均为常数。
[0117]
联立(5)(6)(7)所表示的方程,
[0118][0119]
将过程1、步骤3中得到的永磁同步电机驱动系统最大制动转矩代入上式,即,通过解方程得到与最大制动转矩所对应的电流i
d
、i
q
,分别记录为
[0120]
为保障永磁同步电机可以运行在恒功率工况下,上述计算得到的与弱磁环pi调
节器的输出δi
d
相加得的d轴电流的指令值即,作为永磁同步电机d、q轴电流的指令值加载到电流内环上,上述控制过程如图3所示。
[0121]
步骤4.完成永磁同步电机的闭环控制
[0122]
将电机控制器的电流采样电路采样得到的永磁同步电机的三相电流采样值,经过clark、park坐标变换,得到d
‑
q轴坐标系下的电流采样值i
d
与i
q
,步骤3中得到的永磁同步电机定子电流d、q轴分量的指令值分别与电流采样值i
d
、i
q
作差,并通过电机控制器d、q轴电流调节器的闭环控制作用,得到电机的定子d、q轴电压指令信号u
d
、u
q
,
[0123][0124]
上式中,k
pd
,k
id
分别为d轴电流调节器比例系数和积分系数;k
pq
,k
iq
分别为q轴电流调节器比例系数和积分系数。
[0125]
将计算得到的电压指令信号u
d
、u
q
作为后级svpwm环节的输入,经过电机控制器主控单元中运行的空间矢量调制svpwm策略的运算,生成6路pwm驱动控制信号,将pwm驱动信号输出到电机控制器的功率驱动电路上,通过功率驱动电路控制三相全控桥的开通与关断,实现对永磁同步电机的闭环控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。