1.本实用新型涉及医疗器械技术领域,特别是涉及手术器械夹持装置、手术器械安装装置及手术机器人。
背景技术:
2.传统的骨科手术没有机械臂的导航配合,医生直接抓取手术器械,通过解剖手法、经验判断等来完成手术操作。当用到电动工具时,将电动工具和手术器械直接相连,医生抓取电动工具,完成截骨,磨锉等操作。随着手术器械的发展,通过手术器械夹持装置将骨科手术器械固定在机械臂末端,从而使手术器械搭载在机械臂的末端实现导航,同时保证手术过程中医生对于手术器械的操作。当机械臂导航调整手术器械到一定的部位和姿态时,手术器械夹持装置保证器械位置不变,同时医生能操作器械进行钻孔、磨骨、假体安装等动作。在手术过程中医生通常要频繁的更换不同的手术器械。然而,通过传统的手术器械夹持装置在机械臂的末端拆装手术器械时,操作不方便。
技术实现要素:
3.基于此,有必要针对通过传统的手术器械夹持装置在机械臂的末端拆装手术器械时,操作不方便的问题,提供一种能够实现在手术过程中在机械臂末端快速拆装手术器械的手术器械夹持装置、手术器械安装装置及手术机器人。
4.本技术实施例提供一种手术器械夹持装置,包括:
5.安装套筒,侧壁设有滑槽;
6.内轴套,位于所述安装套筒内并与所述安装套筒固定连接,所述内轴套用于套设于所述手术器械的连杆,所述内轴套的侧壁设有通孔;
7.锁定件,位于所述通孔内,所述锁定件具有锁定状态和释放状态;在所述锁定状态,所述锁定件能够锁定所述连杆沿轴向的位置,在所述释放状态,所述锁定件能够释放所述连杆;以及
8.外轴套,套设于所述内轴套和所述锁定件,所述外轴套沿轴向具有第一位置和第二位置;所述外轴套在所述第一位置时,所述外轴套的内壁与所述锁定件抵接,以致所述锁定件处于所述锁定状态;所述外轴套在所述第二位置时,所述外轴套的内壁释放所述锁定件,以致所述锁定件处于释放状态。
9.上述的手术器械夹持装置,可通过将外轴套移动至第二位置,使锁定件处于释放状态。锁定件在释放状态时释放连杆,连杆能够沿轴向插入或抽出内轴套,从而方便手术器械安装于机械臂末端或从机械臂末端拆卸。待连杆安装到位时,可通过将外轴套移动至第一位置,此时,锁定件限定连杆沿轴向的位置并且不会影响连杆的正常工作。由此可见,通过沿滑槽移动操作部带动外轴套在第一位置和第二位置之间切换,即可方便地将手术器械安装于机械臂末端或从机械臂末端拆卸,操作简单,从而能够实现在手术过程中在机械臂末端快速拆装手术器械。
10.在一实施例中,所述的手术器械夹持装置还包括操作部,一端位于所述安装套筒之外,另一端穿过所述滑槽进入所述安装套筒内并与所述外轴套连接,所述操作部沿所述滑槽滑动时能够带动所述外轴套在所述第一位置和所述第二位置之间切换。
11.在一实施例中,所述外轴套具有第一阶梯孔,所述第一阶梯孔包括第一孔和第二孔,所述第一孔的内径大于所述第二孔的内径;所述外轴套在所述第一位置时,所述锁定件位于所述第二孔内,所述第二孔的内壁能够限定所述锁定件沿所述外轴套径向的位置;所述外轴套在所述第二位置时,所述锁定件位于所述第一孔内。
12.在一实施例中,所述安装套筒内具有抵接结构,所述抵接结构与所述外轴套沿所述安装套筒的轴向排布;
13.所述手术器械夹持装置还包括:弹性件,分别与所述抵接结构和所述外轴套抵接;所述操作部沿所述滑槽移动时,能够带动所述外轴套克服所述弹性件的弹力,以致所述外轴套从所述第一位置移动至所述第二位置;释放所述操作部时,所述弹性件的弹力能够使所述外轴套从所述第二位置移动至所述第一位置。
14.在一实施例中,所述安装套筒具有第二阶梯孔,所述第二阶梯孔包括第三孔和第四孔,所述第三孔的内径大于所述第四孔的内径,所述第三孔的内壁与所述第四孔的内壁的连接处形成台阶面;
15.所述抵接结构为所述台阶面;所述弹性件位于所述第三孔内,所述弹性件的一端与所述外轴套的端部抵接,另一端与所述台阶面抵接。
16.在一实施例中,所述安装套筒具有第二阶梯孔,所述第二阶梯孔包括第三孔和第四孔,所述第三孔的内径大于所述第四孔的内径,所述第三孔的内壁与所述第四孔的内壁的连接处形成台阶面;
17.所述的手术器械夹持装置还包括支撑内衬,所述支撑内衬套设于所述内轴套并位于所述第四孔内,所述支撑内衬的外壁具有凸缘,所述凸缘具有朝向所述外轴套的第一端面和背向所述外轴套的第二端面;
18.所述抵接结构为所述第一端面,所述弹性件的另一端与所述第一端面抵接,以致所述第二端面与所述台阶面抵接。
19.在一实施例中,所述滑槽包括相连通的第一槽和第二槽,所述操作部沿所述第一槽滑动时能够带动所述外轴套在所述第一位置和所述第二位置之间切换;所述第二槽的延伸方向与所述第一槽的延伸方向不同,所述操作部沿所述第二槽滑动时,能够带动所述外轴套转动,且所述外轴套保持在所述第二位置。
20.在一实施例中,所述锁定件为球体,所述球体与所述通孔相适配。
21.在一实施例中,所述的手术器械夹持装置还包括握持部,包括主体和手柄,所述主体套设于所述安装套筒并与所述安装套筒固定连接,所述手柄与所述主体固定连接。
22.在一实施例中,所述操作部包括:滑动部和连接部,所述滑动部位于所述安装套筒外并与所述连接部连接;所述连接部穿过所述滑槽并伸入所述安装套筒内,且所述连接部与所述外轴套连接。
23.本技术另一实施例提供一种手术器械安装装置,包括如上述任一项所述的手术器械夹持装置和电动工具安装装置,所述电动工具安装装置用于连接至机械臂的末端,并用于安装电动工具;所述电动工具安装装置与所述安装套筒或所述内轴套连接。
24.上述的手术器械安装装置,电动工具安装装置用于安装电动工具。由于电动工具安装装置连接至机械臂的末端,电动工具安装装置与安装套筒或内轴套连接,从而,手术器械能够间接通过电动工具安装装置安装于机械臂的末端,并能够通过电动工具进行手术操作。
25.在一实施例中,所述电动工具安装装置包括:
26.内固定套筒,用于套设于电动工具并与所述电动工具的壳体固定连接,所述内固定套筒的外壁设有限位结构;
27.外固定套筒,套设于所述内固定套筒,所述外固定套筒与内轴套和/或所述安装套筒固定连接,所述外固定套筒的内壁设有配合结构;所述配合结构能够与所述限位结构相配合,并阻止所述外固定套筒与所述内固定套筒相对转动。
28.在一实施例中,所述限位结构为连接键,所述配合结构为导向槽,所述导向槽的延伸方向平行于所述外固定套筒的轴向。
29.在一实施例中,所述外固定套筒的侧壁设有开口,所述开口与所述外固定套筒的内腔连通。
30.本技术又一实施例提供一种手术机器人,包括机械臂、如上述任一项所述的手术器械安装装置、手术器械以及电动工具;
31.所述外固定套筒的一端与所述机械臂的末端固定连接,另一端与所述安装套筒或所述内轴套固定连接;
32.所述内固定套筒套设于所述电动工具并与所述电动工具的壳体固定连接;
33.所述手术器械的连杆与所述电动工具的输出轴连接。
34.上述的手术机器人,外固定套筒分别与机械臂的末端和手术器械夹持装置的安装套筒或内轴套固定连接,内固定套筒与电动工具的外壳固定连接,从而电动工具的外壳与手术器械夹持装置不会相对转动。当医生在手术的过程中,拖动机械臂调整机械臂的姿态时,由于电动工具的外壳与手术器械夹持装置不会相对转动,从而机械臂的末端整体重心稳定,机械臂拖动顺畅。并且,当医生手放开机械臂末端时,由于机械臂末端重心稳定,能够规避手术过程中的感染风险。
附图说明
35.图1为一实施例的手术机器人的结构示意图;
36.图2为图1的剖视图;
37.图3为图1中的手术器械的结构示意图;
38.图4为图2中外轴套位于第一位置时手术机器人的局部剖视图;
39.图5为图2中外轴套位于第二位置时手术机器人的局部剖视图;
40.图6为图1中的手术器械夹持装置的安装套筒的结构示意图;
41.图7为图1中的手术器械夹持装置的内轴套的结构示意图;
42.图8为图7的剖视图;
43.图9为图1中的手术器械夹持装置的外轴套的结构示意图;
44.图10为图9的剖视图;
45.图11为另一实施例的手术器械夹持装置的安装套筒的结构示意图;
46.图12为又一实施例的手术器械夹持装置的安装套筒的结构示意图;
47.图13为图1中的手术机器人的另一视图;
48.图14为图13中的外固定套筒、内固定套筒、电动工具以及连杆的连接关系示意图;
49.图15为图14中内固定套筒的结构示意图;
50.图16为图14中连接键的结构示意图;
51.图17为图14中外固定套筒的结构示意图;
52.图18为另一实施例的内固定套筒的结构示意图。
具体实施方式
53.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
54.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
55.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
56.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
57.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
58.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
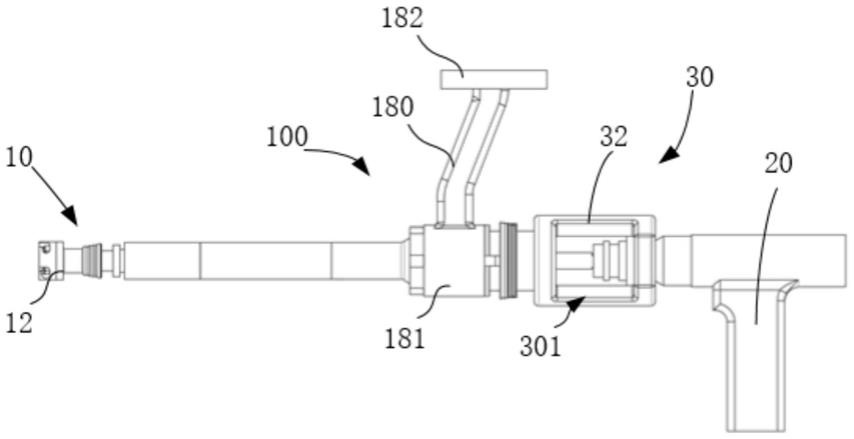
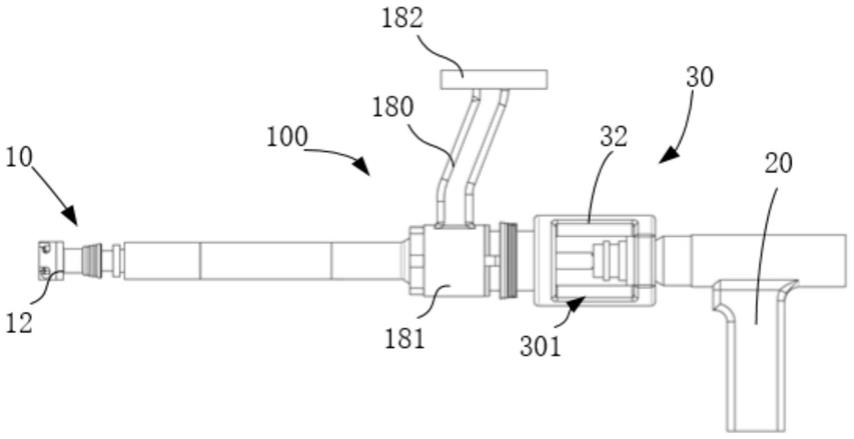
59.请参考图1和图2结合图3,本技术实施例提供一种手术器械夹持装置100。手术器械夹持装置100用于手术机器人中。如图1所示,手术机器人包括手术器械夹持装置100、机械臂(未示出)、电动工具20以及手术器械10。手术器械夹持装置100用于将手术器械10安装在机械臂(未示出)的末端。再参考图4和图5,手术器械夹持装置100包括:安装套筒110、内轴套120、锁定件130、外轴套140以及操作部150。
60.具体地,手术器械10可以是骨科关节置换手术工具,例如,骨锉,杯安装器等。手术器械10包括连杆11和末端执行器12。末端执行器12安装在连杆11的末端。如图3所示,在本实施例中,连杆11的外壁设有沿自身周向延伸的环形凹槽1101。
61.安装套筒110的具体结构如图6所示,安装套筒110为手术器械夹持装置100的主体结构。
62.如图4和图5所示,内轴套120位于安装套筒110内并与安装套筒110固定连接。内轴套120用于套设于手术器械10的连杆11。内轴套120的侧壁设有通孔102。
63.具体地,如图7和图8所示,内轴套120端部具有法兰121。法兰121与安装套筒110的端部通过螺栓连接,从而能够将内轴套120与安装套筒110固定连接。
64.手术器械夹持装置100用于夹持手术器械10时,内轴套120套设于连杆11并与连杆11相适配。锁定件130位于通孔102内。锁定件130具有锁定状态和释放状态。在锁定状态,锁定件130能够锁定连杆11沿轴向的位置,在释放状态,锁定件130能够释放连杆11。
65.外轴套140套设于内轴套120和锁定件130。外轴套140沿轴向具有第一位置和第二位置。外轴套140在第一位置时,外轴套140的内壁限定锁定件130沿外轴套140径向的位置,以致锁定件130处于锁定状态。外轴套140在第二位置时,外轴套140的内壁释放锁定件130,以致锁定件130处于释放状态。
66.具体地,如图5、图9以及图10所示,外轴套140具有第一阶梯孔,第一阶梯孔包括第一孔103和第二孔104,第一孔103的内径大于第二孔104的内径。外轴套140能够沿轴向移动。
67.请结合图4,锁定件130位于通孔102内,因此,通孔102的内壁限定了锁定件130沿内轴套120轴向的位置。外轴套140移动至第一位置时,锁定件130位于第二孔104内。在本实施例中,第二孔104的内壁与锁定件130抵接,从而第二孔104的内壁限定了锁定件130沿外轴套140径向的位置,此时,锁定件130处于锁定状态。如图4所示,在该状态下,锁定件130穿过通孔102并与连杆11配合。请结合图3和图4,锁定件130与连杆11配合时,锁定件130与连杆11的环形凹槽1101配合,且由于锁定件130沿内轴套120径向的位置被限定,从而锁定件130可以限定连杆11沿轴向的位置。并且,连杆11转动时,锁定件130能够沿环形凹槽1101与连杆11做相对运动,不会影响连杆11的正常工作。
68.可通过沿轴向移动外轴套140,使外轴套140移动至第二位置,则锁定件130位于第一孔103内,此时,锁定件130处于释放状态。如图5所示,由于第一孔103较第二孔104的内径大,因此,第一孔103提供了锁定件130沿外轴套140径向运动的空间。可通过将连杆11沿轴向移动,使得环形凹槽1101沿轴向的位置与锁定件130错开,从而锁定件130被连杆11沿径向顶出环形凹槽1101,进而,锁定件130不会阻碍连杆11沿轴向的运动。
69.如图6所示,安装套筒110的侧壁设有滑槽101。再结合图4和图5,操作部150一端位于安装套筒110之外,另一端穿过滑槽101进入安装套筒110内并与外轴套140连接。操作部
150沿滑槽101滑动时能够带动外轴套140在第一位置和第二位置之间切换。
70.具体地,可通过沿滑槽101手动移动操作部150,使操作部150带动外轴套140在第一位置和第二位置之间移动,从而方便锁定件130在锁定状态和释放状态之间切换。
71.下面介绍手术器械夹持装置100用于在机械臂末端安装和拆卸手术器械10时的操作过程。
72.安装过程:通过沿滑槽101移动操作部150,操作部150带动外轴套140移动至第二位置,则锁定件130处于释放状态。此时,可向内轴套120内沿轴向插入连杆11。连杆11沿轴向移动时,锁定件130能够位于环形凹槽1101之外,从而锁定件130不会阻碍连杆11沿轴向运动。待连杆11插入到位时,锁定件130则正好能够与连杆11的环形凹槽1101配合。此时,再通过移动操作部150使外轴套140移动至第一位置,则锁定件130处于锁定状态,从而锁定件130能够限定连杆11沿轴向的位置且不影响连杆11的转动。最后,将安装套筒110或内轴套120与机械臂末端固定,将连杆11与机械臂的末端连接,并将末端执行器12安装于连杆11的末端,从而可将手术器械10通过手术器械安装装置100安装于机械臂的末端。
73.拆卸过程:可通过移动操作部150带动外轴套140移动至第二位置,则锁定件130处于释放状态。此时,可从内轴套120内抽出连杆11。连杆11沿轴向移动时,可将锁定件130顶出环形凹槽1101之外,从而锁定件130不会阻碍连杆11沿轴向运动,进而能够将手术器械从机械臂末端拆掉。
74.上述的手术器械夹持装置100,可通过沿滑槽101移动操作部150,带动外轴套140移动至第二位置,使锁定件130处于释放状态。锁定件130在释放状态时释放连杆11,连杆11能够沿轴向插入或抽出内轴套120,从而方便手术器械10安装于机械臂末端或从机械臂末端拆卸。待连杆11安装到位时,可通过沿滑槽101移动操作部150,带动外轴套140移动至第一位置,此时,锁定件130限定连杆11沿轴向的位置并且不会影响连杆11的正常工作。由此可见,通过沿滑槽101移动操作部150带动外轴套140在第一位置和第二位置之间切换,即可方便地将手术器械安装于机械臂末端或从机械臂末端拆卸,操作简单,从而能够实现在手术过程中在机械臂末端快速拆装手术器械10。
75.请参考图4和图5,在一实施例中,安装套筒110内具有抵接结构。抵接结构与外轴套140沿安装套筒110的轴向排布。手术器械夹持装置100还包括弹性件160。弹性件160分别与抵接结构和外轴套140抵接。操作部150沿滑槽101移动时,能够带动外轴套140克服弹性件160的弹力,以致外轴套140从第一位置移动至第二位置。弹性件160的弹力能够使外轴套140从第二位置移动至第一位置。
76.具体地,在本实施例中,弹性件160为螺旋压缩弹簧,具有向外扩张的弹力。
77.安装套筒110具有第二阶梯孔(未示出)。第二阶梯孔包括第三孔和第四孔,第三孔的内径大于第四孔的内径,第三孔的内壁与第四孔的内壁的连接处形成台阶面。
78.如图4和图5,手术器械夹持装置100还包括支撑内衬170,支撑内衬170套设于内轴套120并位于第四孔内。支撑内衬170的外壁与安装套筒110配合,支撑内衬170的内壁与内轴套120配合,从而能够使得内轴套120位置稳定。
79.支撑内衬170的外壁具有凸缘171,凸缘171具有朝向外轴套140的第一端面(未示出)和背向外轴套140的第二端面(未示出)。支撑内衬170与外轴套140沿轴向间隔布置。抵接结构为凸缘171的第一端面。弹性件160的一端与外轴套140抵接,另一端与凸缘171的第
一端面抵接,从而可以使凸缘171的第二端面抵接于安装套筒110的台阶面。
80.如图4所示,当释放操作部150时,在弹性件160的弹力的作用下,外轴套140可以移动至第一位置。此时,锁定件130处于锁定状态。由于弹性件160的弹力作用支撑外轴套140处于第一位置,因此,在不手动移动操作部150的情况下,外轴套140能够稳定地处于第一位置,从而有利于手术器械10在工作状态稳定。
81.请结合图4至图6,在本实施例中,外轴套140处于第一位置时,操作部150与滑槽101的一端内壁抵接,从而可以使操作部150位置稳定,进而外轴套140在第一位置时位置稳定。
82.通过手动移动操作部150沿滑槽101移动时,能够带动外轴套140克服弹性件160的弹力,以致外轴套140移动至第二位置,锁定件130处于释放状态,则可进行手术器械10的安装或拆卸。
83.可以理解,在其他实施例中,也可以不设置支撑内衬170,而是将弹性件160的另一端抵接至上述的台阶面上。此时,则抵接结构为上述的台阶面。
84.请参考图4和图5,在一实施例中,锁定件130为球体,球体与通孔102相适配。例如锁定件130可以是钢球。球体可以转动,活动灵活,连杆11沿轴向运动时,球体的阻力小,方便将球体顶出环形凹槽1101,同时也方便球体进入环形凹槽1101。
85.请参考图4和图5,在一实施例中,操作部150包括滑动部151和连接部152。滑动部151位于安装套筒110外并与连接部152连接。连接部152穿过滑槽101并伸入安装套筒110内,且连接部152与外轴套140连接。
86.具体地,如图9和图10所示,在本实施例中,连接部152为连接螺栓。外轴套140上设有螺栓孔105。可通过将该连接螺栓与螺栓孔105配合,从而可以使得外轴套140与该连接螺栓连接。再将滑动部151与该连接螺栓连接,从而可以通过操作滑动部151带动外轴套140移动。
87.请参考图13,在一实施例中,滑动部151为滑环。滑环整体呈环状。滑环套设于安装套筒110并能够沿轴向在滑槽101内移动。滑环沿轴向在滑槽101内移动时,可带动连接部152沿轴向移动,连接部152带动外轴套140沿轴向在第一位置和第二位置之间移动。
88.请参考图4和图5,在一实施例中,手术器械夹持装置100还包括握持部180。握持部180包括主体181和手柄182。主体181套设于安装套筒110并与安装套筒110固定连接。手柄182与主体181固定连接。
89.具体地,主体181的端部可设置连接法兰(未示出),通过连接法兰将主体181与安装套筒110固定连接。通过手柄182方便握持手术器械夹持装置100,从而方便安装和拆卸手术器械10。
90.请参考图11,在另一实施例中,安装套筒110的侧壁上的滑槽101包括相连通的第一槽101a和第二槽101b。第一槽101a的延伸方向平行于安装套筒110的轴向。操作部150沿第一槽101a滑动时能够带动外轴套140在第一位置和第二位置之间切换。第二槽101b的延伸方向与第一槽101a的延伸方向不同,操作部150沿第二槽101b滑动时,能够带动外轴套140转动,且外轴套140位于第二位置。
91.具体地,如图11所示,在本实施例中,第一槽101a的方向沿安装套筒110的轴向。第二槽101b的延伸方向垂直于第一槽101a的延伸方向,第二槽101b的延伸方向沿周向。第二
槽101b和第一槽101a大致呈“l”形。操作部150沿第一槽101a滑动时,带动外轴套140沿轴向在第一位置和第二位置切换。
92.由于第二槽101b的延伸方向沿周向,可以理解,操作部150沿第二槽101b移动时,操作部150沿安装套筒110的周向转动。如前所述,在本实施例中,操作部150与连接部152连接。连接部152为连接螺栓,与外轴套140固定连接,因此,操作部150沿第二槽101b移动时,带动外轴套140沿周向转动。并且,操作部150沿第二槽101b移动时,外轴套140只沿周向进行转动,其轴向位置仍然保持在第二位置,因此,锁定件130仍然处于释放状态,方便拆卸和安装手术器械10。此时,可继续将操作部150沿第二槽101b移动。
93.由于第二槽101b的延伸方向垂直于第一槽101a,第一槽101a的延伸方向沿安装套筒110的轴向,因此,第二槽101b的内壁可以限制或阻止操作部150沿轴向移动,从而阻止外轴套140沿轴向运动,进而,不需要手动握持操作部150,即可使外轴套140能够保持在第二位置,进而方便安装或拆卸手术器械10。
94.可以理解,在其他实施例中,第二槽101b也可以倾斜于第一槽101a,而不必保持完全垂直的角度。第一槽101a的延伸方向也可以略倾斜于安装套筒110的轴向,而不必保持完全平行。
95.可以理解的是,在其他实施例中,连接部152也可以不是螺栓。例如,连接部152可以是连接柱。可在外轴套140外表面设一沿周向延伸的环形凹槽。连接柱的一端与该环形凹槽的侧壁配合。滑动部151沿轴向移动时,连接柱则能够带动外轴套140沿轴向在第一位置和第二位置之间移动。在这种配置下,若操作部150沿第二槽101b移动时,则连接部152随操作部150沿周向转动,从而连接部152也沿该环形凹槽转动。因此,连接部152相对于外轴套140转动,而外轴套140不转动,也不沿轴向移动,外轴套140的轴向位置仍然保持在第二位置。
96.请参考图12,在又一实施例中,第一槽101a延伸至安装套筒110的端部,从而从安装套筒110的端部将操作部150滑入第一槽101a即可,方便安装操作部150且加工方便。
97.请参考图4和图5,本技术再一实施例还提供一种手术器械安装装置。手术器械安装装置包括上述任一实施例中的手术器械夹持装置100和电动工具安装装置30。电动工具安装装置30与安装套筒110或内轴套120连接。电动工具安装装置30用于连接至机械臂的末端,并用于安装电动工具20。
98.具体地,电动工具20例如是电钻。手术器械10安装于机械臂的末端时,电动工具20安装于电动工具安装装置30,连杆11连接至电动工具20,从而可通过电动工具20带动连杆11转动,进行磨骨、钻骨等操作。
99.由于电动工具安装装置30连接至机械臂的末端,电动工具安装装置30与安装套筒110或内轴套120连接,连杆11与电动工具20连接,从而,手术器械10能够间接通过电动工具安装装置30安装于机械臂的末端,并能够通过电动工具20进行手术操作。
100.请参考图4和图5以及图13,在一实施例中,电动工具安装装置30包括内固定套筒31和外固定套筒32。内固定套筒31用于套设于电动工具20并与电动工具20固定连接。外固定套筒32与内轴套120和/或安装套筒110固定连接。再参考图14和图18,内固定套筒31的外壁设有限位结构33。外固定套筒32的内壁设有配合结构34。外固定套筒32套设于内固定套筒31时,配合结构34能够与限位结构33相配合。配合结构34与限位结构33相配合时,能够阻
止外固定套筒32与内固定套筒31相对转动。
101.具体地,请结合图14至图16,在本实施例中,限位结构33为连接键。该连接键与内固定套筒31可通过螺栓固定连接。并且该连接键凸出于内固定套筒31的外壁。请参考图17,配合结构34为外固定套筒32内壁开设的导向槽。该导向槽沿外固定套筒32的轴向延伸。将内固定套筒31插入外固定套筒32内部时,将该连接键与导向槽对准,从而可以使该连接键与导向槽配合。
102.由于导向槽的延伸方向与外固定套筒32的轴向平行,因此,通过连接键与导向槽配合,可以阻止外固定套筒32与内固定套筒31相对转动。
103.电动工具安装装置30连接至机械臂的末端时,外固定套筒32与机械臂的末端固定连接。电动工具20的外壳与内固定套筒31固定连接。请参考图4和图5,外固定套筒32与内轴套120固定连接,从而电动工具20的外壳与内轴套120不会相对转动。当医生在手术的过程中,拖动机械臂调整机械臂的姿态时,由于电动工具20的外壳能够与内轴套120和安装套筒110不会相对转动,从而机械臂的末端整体重心稳定,机械臂拖动顺畅。并且,当医生手放开机械臂末端时,由于机械臂末端重心稳定,能够规避手术过程中的感染风险。
104.进一步地,通过该连接键与导向槽对准,并将内固定套筒31插入外固定套筒32内部,即可以使内固定套筒31和外固定套筒32装配在一起,方便装配也方便拆卸。
105.在其他实施例中,导向槽也可以设于内固定套筒31的外壁,连接键也可以设置于外固定套筒32的内壁,同样能够阻止外固定套筒32与内固定套筒31相对转动。
106.请参考图17,在一实施例中,外固定套筒32的侧壁设有开口301。开口301与外固定套筒32的内腔连通。
107.具体地,电动工具20与连杆11连接时,将电动工具20的输出轴与连杆11连接。电动工具20的输出轴与连杆11的装配位置处于外固定套筒32内部,因此,通过开设开口301,方便装配连杆11与电动工具20且方便观察。
108.请参考图18,在另一实施例中,内固定套筒31与限位结构33可一体成型。
109.请参考图1和图2,本技术又一实施例还提供一种手术机器人。手术机器人包括机械臂(未示出)、上述实施例中任一项的手术器械安装装置、手术器械10以及电动工具20。外固定套筒32的一端与机械臂的末端固定连接,另一端与安装套筒110或内轴套120固定连接。内固定套筒31套设于电动工具20并与电动工具20的壳体固定连接。手术器械10的连杆与电动工具20的输出轴连接。
110.上述的手术机器人,外固定套筒32分别与机械臂的末端和手术器械夹持装置100的安装套筒110或内轴套120固定连接,内固定套筒31与电动工具20的外壳固定连接,从而电动工具20的外壳与手术器械夹持装置100不会相对转动。当医生在手术的过程中,拖动机械臂调整机械臂的姿态时,由于电动工具20的外壳与手术器械夹持装置100不会相对转动,从而机械臂的末端整体重心稳定,机械臂拖动顺畅。并且,当医生手放开机械臂末端时,由于机械臂末端重心稳定,能够规避手术过程中的感染风险。
111.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
112.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,
但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。