1.本发明涉及一种曲率半径测量方法,尤其涉及一种基于相关系数匹配的曲率半径测量方法。
背景技术:
2.球面镜在光刻物镜工程研制领域、高功率激光驱动系统、大型望远系统、高精密光学系统等方面得到广泛应用,球面镜的加工质量对整个系统的成像效果有着关键影响。曲率半径是表征球面镜的重要参数,曲率半径在加工过程中,准确测得曲率半径是光学车间检验的重要工作。因而,简便、快捷、稳定、高精度的曲率半径测量方法是研究人员们不断探索的研究方向。
3.中国专利公开号cn107966114a公开了一种非接触测量曲率半径的装置。包括:计算机、第一数据传输线、第二数据传输线、光栅尺定尺、光栅尺动尺、激光位移传感器、处理器、光栅数据采集卡、被测器件。通过调节激光位移传感器测出被测件距激光传感器的距离,移动光栅尺位置读取被测件表面三点的位置坐标并代入圆的方程从而求出曲率半径。该方法虽然操作简单,但是光栅尺位置的确定易产生误差,影响曲率半径测量结果。
4.中国专利公开号cn110455221a公开了一种快速测量光学镜片曲率半径的光路结构和设备,包括:发光led、切换式透镜单元、棱镜、半反半透镜﹑保护玻璃、光阑和ccd摄像机。通过采用ccd图像采集和亚像素拟合圆的算法结合,并结合工控机得到被测样本的曲率半径。首先,该结构中存在多次反射改变光迹,使得适用范围变广,但是存在传输损耗,对成像质量存在影响;其次,专利中测量曲率半径的方法是通过工控机对图像进一步处理后再进行亚像素拟合圆得到的曲率半径精度较高,精度受图像质量影响大,并且稳定性降低。
5.中国专利公开号cn102128600b公开了一种利用激光测量透镜曲率半径的方法及其装置。包括:安装座、上盖、圆口、凹槽、凸透镜、反射镜、读数显微镜。通过度数显微镜测量出干涉条纹安环级数并用逐差法算出暗环直径,最后再由公式计算出曲率半径。该方法虽然解决了测量时透镜产生应力变形的问题,但该装置操作要求严谨,无辅助器件,调试阶段较为繁琐,不便于高效地测量透镜的曲率半径。
技术实现要素:
6.发明目的:本发明目的在于提供一种基于相关系数匹配的曲率半径测量方法,在保证测量精度的情况下简化测量方法、提高测量效率和扩大测量范围。
7.技术方案:本发明包括以下步骤:
8.(1)干涉图预处理;
9.(2)初始曲率半径求解;
10.(3)相关系数求解,以r∈{r
初
±
δr}为索引范围,仿真出索引范围内每一个曲率半径r对应的牛顿环干涉图i
r
(x,y),分别计算i
r
(x,y)与i1(x,y)的相关系数,找出相关系数最大值对应的曲率半径r,即为待测球面镜的曲率半径。
11.所述步骤(1)中的干涉图预处理为:提取采集的牛顿环干涉图有效区域i0(x,y),去除i0(x,y)的常数项得到i1(x,y),由i1(x,y)经hough变换来标定干涉图的中心坐标。
12.所述的干涉图预处理具体包括:
13.步骤1:提取采集的牛顿环干涉图中的有效部分i0(x,y),去除牛顿环干涉图i0(x,y)的常数项,得到i1(x,y),其表达式为:
[0014][0015]
其中,i
0(max)
和i
0(min)
分别为i0(x,y)的最大值和最小值,r
t
为待测球面镜的曲率半径;
[0016]
步骤2:通过边缘识别后提取圆环,经hough变换后确定干涉图中心坐标(x1,y1)。
[0017]
所述步骤2具体包括:
[0018]
1)提取圆环(x
‑
a)2 (y
‑
b)2=r2,其中(a,b)为提取圆环的圆心坐标,r为提取圆环的半径,(x,y)为xoy坐标系下提取圆环上任意一点的坐标;
[0019]
2)提取圆环上所有的点(x
i
,y
i
)(i=1,2,3,
…
,n),其任意一点经hough变换到参数空间坐标系后变成圆锥面,参数空间下的圆锥面表达式为:
[0020]
(a
‑
x
i
)2 (b
‑
y
i
)2=r2[0021]
其中,(x
i
,y
i
)为xoy坐标系中所提取的圆环上第i个点的坐标,a、b、r为参数空间坐标系中满足圆锥表达式的变量;
[0022]
对于提取的圆环上的n个点,在参数空间会形成对应的n个圆锥,且n个圆锥都会相交于一点,通过寻找参数空间上的累积最大值,得到坐标(a,b,r),其中(a,b)为干涉图的中心坐标(x1,y1),r为提取圆环的半径。
[0023]
所述步骤(2)中初始曲率半径求解为:取通过干涉图i1(x,y)中心坐标的轮廓曲线,并确定暗环半径r
暗
的大小,根据暗环半径求得初始曲率半径r
初
。
[0024]
所述的初始曲率半径求解具体为:
[0025]
1)取通过i1(x,y)中心坐标(x1,y1)的轮廓曲线,提取远离中心的6~10组暗环半径r
暗
,对r
暗
进行像素标定后,根据暗环半径得到3~5个曲率半径值r0,其计算公式为:
[0026][0027]
其中,r
m
和r
n
分别为i1(x,y)的第m级和第n级暗环半径,λ为工作波长;
[0028]
2)取r0的平均值作为初始曲率半径r
初
。
[0029]
所述步骤(3)中相关系数的求解具体包括:
[0030]
步骤1:根据初始曲率半径r
初
确定索引范围r∈{r
初
±
δr},其中,δr=c
·
r
初
,0≤c≤0.2;
[0031]
步骤2:仿真出每一个索引曲率半径r对应的牛顿环干涉图i
r
(x,y),计算i
r
(x,y)和i1(x,y)的相关系数,其相关公式为:
[0032]
去除常数项的i
r
(x,y)表达式:
[0033]
i1和i
r
的相关系数求解公式:
[0034]
其中r为索引曲率半径,(x1,y1)为干涉图i1(x,y)的中心坐标,(x2,y2)为干涉图i
r
(x,y)的中心坐标,cov(i1,i
r
)为i1和i
r
的协方差,δ
i1
和δ
ir
分别为i1(x,y)和i
r
(x,y)的方差;
[0035]
步骤3:找出相关系数最大值ρ
max
对应的索引曲率半径r,即待测球面镜的曲率半径。
[0036]
有益效果:本发明采用单幅牛顿环干涉图,根据暗环半径求得一个初始曲率半径,由初始曲率半径设置索引范围,再进行相关系数匹配出高精度的待测曲率半径,其测量过程简单高效,避免了因繁琐的调试步骤而引入测量误差,使得测量方法简便高效的同时又确保了测量的精度,其测量精度优于0.5%。
附图说明
[0037]
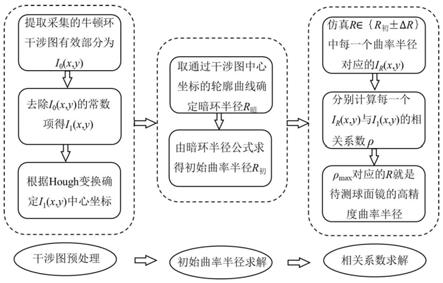
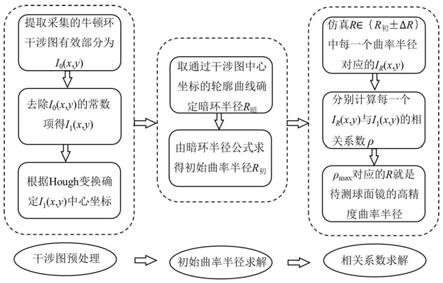
图1为本发明的流程图;
[0038]
图2中(a)为仿真的牛顿环干涉图,
[0039]
(b)为通过仿真的牛顿环干涉图中心坐标的轮廓曲线,
[0040]
(c)为仿真干涉图的暗环半径数据和求得的r
初
,
[0041]
(d)为仿真的牛顿环干涉图在索引范围内相关系数匹配结果;
[0042]
图3中(a)为实验采集的牛顿环干涉图,
[0043]
(b)为通过采集的牛顿环干涉图中心坐标的轮廓曲线,
[0044]
(c)为采集干涉图的暗环半径数据和求得的r
初
,
[0045]
(d)为采集的牛顿环干涉图在索引范围内相关系数匹配结果。
具体实施方式
[0046]
下面结合附图对本发明作进一步说明。
[0047]
如图1所示,本发明的测量方法包括以下步骤:(1)干涉图预处理:提取采集的单幅牛顿环干涉图有效区域i0(x,y),去除i0(x,y)的常数项得到i1(x,y),由i1(x,y)经hough变换来标定干涉图的中心坐标;(2)初始曲率半径求解:取通过干涉图i1(x,y)中心坐标的轮廓曲线,并确定暗环半径r
暗
的大小,根据暗环半径求得初始曲率半径r
初
;(3)相关系数求解:以r∈{r
初
±
δr}为索引范围,仿真出索引范围内每一个曲率半径对应的牛顿环干涉图i
r
(x,y),分别计算i
r
(x,y)与i1(x,y)的相关系数,找出相关系数最大值ρ
max
对应的曲率半径r,即为待测球面镜的高精度曲率半径。
[0048]
具体过程如下:
[0049]
(1)干涉图预处理
[0050]
步骤1:提取采集的牛顿环干涉图中的有效部分i0(x,y),去除牛顿环干涉图i0(x,y)的常数项,得到i1(x,y),其表达式为:
[0051]
[0052]
其中i
0(max)
和i
0(min)
分别为i0(x,y)的最大值和最小值,r
t
为待测球面镜的曲率半径;
[0053]
步骤2:通过边缘识别后提取一个合适的圆环,经hough变换确定干涉图中心坐标(x1,y1),具体为:
[0054]
提取圆环的表达式:(x
‑
a)2 (y
‑
b)2=r2;
[0055]
其中(a,b)为提取圆环的圆心坐标,r为提取圆环的半径,(x,y)为xoy坐标系下提取圆环上任意一点的坐标;
[0056]
而提取圆环上所有的点(x
i
,y
i
)(i=1,2,3,
…
,n),其任意一点经hough变换到参数空间坐标系下就会变成圆锥面:
[0057]
参数空间下的圆锥面表达式:(a
‑
x
i
)2 (b
‑
y
i
)2=r2;
[0058]
其中(x
i
,y
i
)为xoy坐标系中所提取的圆环上第i个点的坐标,a、b、r为参数空间坐标系中满足圆锥表达式的变量;
[0059]
对于提取的圆环上的n个点,在参数空间会形成对应的n个圆锥,且n个圆锥都会相交于一点,通过寻找参数空间上的累积最大值,就可以得到坐标(a,b,r),其中(a,b)为干涉图的中心坐标(x1,y1),r为提取圆环的半径。
[0060]
(2)初始曲率半径求解
[0061]
步骤1:取通过牛顿环干涉图中心坐标(x1,y1)的轮廓曲线,选择离中心较远的6~10组暗环半径r
暗
,对r
暗
进行像素标定后,根据暗环半径得到3~5个曲率半径值r0,取r0的平均值作为初始曲率半径r
初
,具体为:
[0062]
曲率半径值的计算公式为:
[0063]
其中r
m
和r
n
分别为i1(x,y)的第m级和第n级暗环半径,λ为工作波长。
[0064]
(3)相关系数求解
[0065]
步骤1:根据初始曲率半径r
初
确定一个索引范围r∈{r
初
±
δr},δr=c
·
r
初
,其中0≤c≤0.2;
[0066]
步骤2:仿真出每一个索引曲率半径r对应的牛顿环干涉图i
r
(x,y),再计算i
r
(x,y)和i1(x,y)的相关系数,其相关公式为:
[0067]
去除常数项的i
r
(x,y)表达式:
[0068]
i1和i
r
的相关系数求解公式:
[0069]
其中r为索引曲率半径,(x1,y1)为干涉图i1(x,y)的中心坐标,(x2,y2)为干涉图i
r
(x,y)的中心坐标,cov(i1,i
r
)为i1和i
r
的协方差,δ
i1
和δ
ir
分别为i1(x,y)和i
r
(x,y)的方差;
[0070]
步骤3:找出相关系数最大值ρ
max
对应的索引曲率半径r,ρ
max
对应的索引曲率半径就是待测球面镜的高精度曲率半径。
[0071]
实施例1
[0072]
本实施例为仿真例,球面镜的有效口径d=50mm,波长λ=632.8nm,干涉图i1(x,y)的像素大小为512
×
512,索引范围r∈{r
初
±
δr},其δr=0.15
·
r
初
,标准镜的曲率半径为50000mm。
[0073]
曲率半径为50000mm的仿真牛顿环干涉图i1(x,y)如图2(a)所示;提取采集牛顿环干涉图,提取通过牛顿环干涉图中心坐标的轮廓曲线如图2(b)所示;根据轮廓曲线提取离中心较远的10组暗环半径r
暗
,并求得初始曲率半径r
初
,如图2(c)所示;由初始曲率半径r
初
,设定索引范围内的相关系数匹配结果,如图2(d)所示。结果显示相关系数最大值ρ
max
对应的索引曲率半径为50001.3955mm。
[0074]
实施例2
[0075]
本实施例为实验例,球面镜的有效口径d=50mm,波长λ=632.8nm,干涉图i1(x,y)的像素大小为512
×
512,索引范围r∈{r
初
±
δr},其δr=0.15
·
r
初
,标准镜的曲率半径为41400mm。
[0076]
实验采集的牛顿环干涉图i1(x,y)如图3(a)所示;提取通过牛顿环干涉图中心坐标的轮廓曲线如图3(b)所示;根据轮廓曲线提取离中心较远的10组暗环半径r
暗
,并求得初始曲率半径r
初
,如图3(c)所示;在索引范围内的相关系数匹配结果如图3(d)所示。结果显示相关系数最大值ρ
max
对应的索引曲率半径为41219.8410mm,相较于标准球面镜曲率半径41400mm,其精确度优于0.44%。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。