1.本公开涉及摄像技术领域,尤其涉及相机模组及终端设备。
背景技术:
2.随着科技的不断进步,影像摄取技术在日常生活中被广泛应用。例如,手机、平板电脑、笔记本电脑等终端设备中,均安装有相机模组。并且,相机模组的功能也越来越多,例如,自动对焦及自动防抖动功能。
3.其中,驱动马达驱动镜头移动以实现镜头的自动对焦或自动防抖功能。驱动马达的引脚通常焊接于电路板,为驱动马达供电和传输数据。
4.然而,通过焊接工艺将驱动马达的引脚焊接在电路板的焊盘上,一方面,焊接设备成本高,占地面积大。另一方面,如焊接不良,无法二次加工,只能废弃,造成物料浪费。
技术实现要素:
5.为克服相关技术中存在的问题,本公开提供一种相机模组及终端设备。
6.根据本公开的实施例的第一方面,提供一种相机模组,包括:镜头驱动件;引脚,与所述镜头驱动件连接,所述引脚包括本体部以及设置于所述本体部的接触部;电路板,设置有与所述接触部相对应的触点;其中,所述接触部抵接于所述触点。
7.根据本公开的一些实施例中,所述引脚包括弹性部,所述弹性部的一端与所述本体部连接,另一端与所述接触部连接,其中,在所述接触部抵接于所述触点的状态下,所述弹性部被压缩。
8.根据本公开的一些实施例中,所述本体部朝向所述电路板延伸,所述弹性部位于所述本体部内部,所述接触部可伸缩地设置于所述本体部的自由端。
9.根据本公开的一些实施例中,所述本体部呈中空柱体;所述接触部呈球体或者半球体,其中,所述呈球体或者所述半球体的至少部分显露于所述中空柱体。
10.根据本公开的一些实施例中,所述弹性部为弹簧或者弹片。
11.根据本公开的一些实施例中,所述电路板设置有凹槽,所述触点位于所述凹槽内。
12.根据本公开的一些实施例中,在所述接触部抵接于所述触点的状态下,所述接触部的至少部分位于所述凹槽内。
13.根据本公开的一些实施例中,相机模组包括:座体,所述镜头驱动件固定于所述座体;底座,所述底座设置于所述座体与所述电路板之间;其中,所述座体固定于所述底座。
14.根据本公开的一些实施例中,相机模组包括:镜头,与所述镜头驱动件连接,所述镜头驱动件驱动所述镜头移动。
15.根据本公开实施例的第二方面,提供一种终端设备,包括:如上述第一方面中,任一实施例的相机模组。
16.本公开的实施例提供的技术方案可以包括以下有益效果:
17.本公开的相机模组,通过引脚的接触部与电路板上的触点抵接的方式,实现镜头
驱动件与电路板之间的电导通。相较于焊接的方式,一方面无需使用焊接设备及焊接材料,节约成本,另一方面,降低了报废率,易于返修及安装。
18.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
19.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
20.图1是根据本公开一示例性实施例示出的相机模组的结构示意图。
21.图2是根据本公开一示例性实施例示出的引脚与电路板连接结构示意图。
22.图3是根据本公开一示例性实施例示出的引脚与电路板连接结构剖视图。
23.图4是根据本公开一示例性实施例示出的引脚放大结构示意图。
24.图5是根据本公开一示例性实施例示出的终端设备的结构示意图。
具体实施方式
25.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
26.图1是根据本公开一示例性实施例示出的相机模组的结构示意图。图5是根据本公开一示例性实施例示出的终端设备的结构示意图。
27.如图1和图5所示,本公开提供的相机模组100可以应用于终端设备200,终端设备200可以是智能手机、平板电脑、笔记本电脑、诸如智能手环及智能手表等可穿戴设备、照相机、摄像机、行车记录仪等。
28.以智能手机为例,来自待拍摄物体的光线经由相机模组100的镜头折射调整后,再投射到图像传感器,图像传感器将光信息转换成数字信息,再经过智能手机内部处理器处理,呈现于屏幕上。
29.相机模组100可具有自动对焦(auto focus,af)、变焦以及防抖功能。例如,镜头相对于图像传感器可以相对移动,以进行对焦。又例如,镜头的多个透镜之间可以相对位移,以进行调焦。
30.防抖功能可以用于消除因终端设备抖动引起的成像模糊,以获得更加清晰的图像。终端设备的抖动可以是由于用户手持终端设备而产生的振动(抖动)或转动,或者承载终端设备的移动装置移动过程中产生的振动(抖动)或转动。移动装置例如可以是移动架或者行驶车辆等。可以通过位置传感器(如霍尔传感器)感测相机模组的俯仰和偏航角度。
31.图2是根据本公开一示例性实施例示出的引脚与电路板连接结构示意图。图3是根据本公开一示例性实施例示出的引脚与电路板连接结构剖视图。图4是根据本公开一示例性实施例示出的引脚放大结构示意图。
32.如图1
‑
图4所示,本公开实施例的相机模组100可以包括镜头驱动件(图未示出)、引脚40及电路板60。
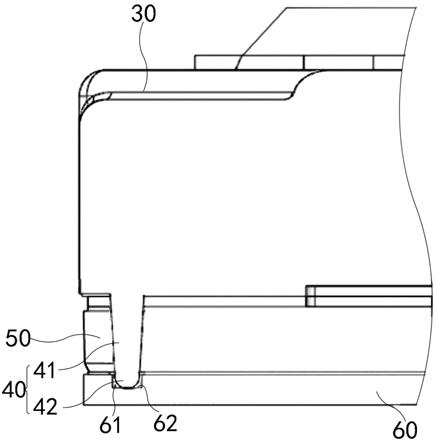
33.镜头驱动件用于驱动镜头移动,以实现自动对焦或防抖功能。例如,镜头驱动件可以是音圈马达,音圈马达固定于座体30。座体30具有用于容置镜头的容置孔31,可以在容置孔31的内壁设置有螺纹32,镜头的镜筒螺纹配合于容置孔31。
34.引脚40与镜头驱动件连接,镜头驱动件通过引脚40与电路板60导通,为镜头驱动件供电和传输数据。引脚40可以包括本体部41及设置于本体部41的接触部42,本体部41用于支撑接触部42,接触部42用于与电路板60导通。在一示例中,接触部42可以直接与镜头驱动件电连接,在另一示例中,接触部42可以通过本体部41与镜头驱动件电连接。引脚40的材质可以是铜、铁镀锡等。
35.举例而言,镜头驱动件为音圈马达,引脚40可以设置有两个,分别与音圈马达的线圈电连接,以形成电流回路。通过对线圈的通电产生磁力,与磁体之间相互作用,驱动镜头移动,实现镜头的自动对焦及防抖功能。两个引脚40可以位于座体30的同一侧,也可以位于座体30的不同侧,如相对侧或相邻侧。引脚40的数量并不限于两个,可以是更多个,从而为镜头驱动件驱动镜头对焦及防抖提供电力和数据支持。
36.镜头驱动件不限于音圈马达,在其他实施例中,镜头驱动件可以是压电马达,引脚40与压电马达电连接,压电马达通过引脚40与电路板60导通。压电马达与镜头连接,通过对压电马达的压电材料(如压电陶瓷)通电使其自身产生形变,以驱动镜头移动,实现镜头的自动对焦及防抖动能。
37.电路板60为相机模组100供电和传输数据。电路板60上设置有与引脚40的接触部42相对应的触点62。可以通过物理气相沉积(pvd)技术在电路板60上形成触点62,触点62通过走线与电路板上的驱动电路或者电连接器(btb)连接。电路板60可以为柔性电路板或者刚性电路板,通过电连接器与终端设备的主板电连接。当电路板60为柔性材质时,可以通过增加加强钢板以提高柔性电路板60的强度。
38.其中,引脚40的接触部42抵于电路板60的触点62,通过接触部42与触点62的接触,实现镜头驱动件与电路板60的电连接。
39.安装时,先将镜头驱动件固定到座体30,使引脚40的接触部42对准电路板60上的触点62,然后使接触部42抵于触点62,使二者充分接触,从而镜头驱动件通过引脚40与电路板60导通。
40.相机模组100包括底座50,底座50具有供光线穿过的通孔,底座50设置于电路板60与座体30之间,且固定于电路板60上表面。在引脚40的接触部42与电路板60上的触点62接触后,将座体30固定与底座50固定,例如,通过黏胶固定,使接触部42与电路板60上的触点62保持稳固接触。
41.本公开实施例的相机模组100,通过引脚40的接触部42与电路板60上的触点62抵接的方式,实现镜头驱动件与电路板60之间的电导通。相较于焊接的方式,一方面无需使用焊接设备及焊接材料(如焊锡),节约成本。另一方面,降低了报废率,易于返修及安装。
42.在一些实施例中,引脚40包括弹性部,弹性部的一端与本体部41连接,另一端与接触部42连接,其中,在接触部42抵接于触点62的状态下,弹性部被压缩。
43.在引脚40的接触部42抵于电路板60上的触点62时,接触部42朝向与电路板60相反的方向挤压弹性部,使弹性部发生形变,弹性部给接触部42朝向电路板60的方向的弹性力,使接触部42紧紧抵于电路板60上的触点62,使得接触部42与触点62接触更充分稳固,提高
连接可靠性。其中,弹性部可以是弹簧或者弹片。
44.作为一个示例,引脚40的本体部41朝向电路板60延伸凸出于座体30,弹性部位于本体部41内部,接触部42可伸缩地设置于本体部41的自由端。
45.本体部41可以朝向电路板60的方向延伸形成中空柱体,弹性部位于中空柱体的内部,接触部42可以呈球体或者半球体。例如,接触部42为一球体,位于中空柱体的自由端,中空柱体包括相对的连接端和自由端,其中,连接端为远离电路板60的一端,可以与音圈马达的线圈电连接,自由端为朝向电路板60的一端,也为邻近电路板60的一端,通过位于中空柱体内部的弹簧连接,球体部分的显露于中空柱体的自由端,或者球体全部暴露于中空柱体的自由端。初始状态下,弹簧处于自然状态,通过弹簧将球体保持在中空柱体自由端部。在球体与电路板60上的触点62接触时,继续朝向电路板60方向施加压力,球体大部分缩回至中空柱体内,与此同时,弹簧被压缩,弹簧给予球体朝向电路板方向的弹力,以使球体紧紧抵于电路板60上的触点62,保持紧密接触。通过球体圆形球面能够更容易的与电路板60上的触点62接触,确保连接可靠性。
46.又例如,接触部42为一半球体,位于中空柱体的自由端,通过位于中空柱体内部的弹簧连接,半球体的球形表面显露于中空柱体的自由端。弹簧的一端固定在中空柱体内部,另一端固定在半球体的截面。初始状态下,弹簧处于自然状态,通过弹簧将半球体保持在中空柱体自由端部。在半球体与电路板60上的触点62接触时,继续朝向电路板60方向施加压力,半球体大部分缩回至中空柱体内,与此同时,弹簧被压缩,弹簧给予半球体朝向电路板方向的弹力,以使球体紧紧抵于电路板60上的触点62,保持紧密接触。通过半球体的截面便于与弹簧连接,球面能够更容易与电路板60上的触点62接触,确保连接可靠性。
47.在一些实施例中,电路板60设置有凹槽61,触点62位于凹槽61内。在电路板60的表面与引脚40的接触部42相对应的位置开设有凹槽61,凹槽61的形状可以是圆形、矩形或其他不规则形状。凹槽61对引脚40的接触部42起到限位的作用。组装时,将引脚40的接触部42插入凹槽61中,并与凹槽61内的触点62接触,以电连接。在接触部42抵接于触点62的状态下,接触部的至少部分位于凹槽61内。例如,接触部42抵于凹槽61内的触点62时,继续朝向电路板60方向施加压力,弹簧被压缩,接触部42一部分缩回中空柱体内部,另一部分显露于中空柱体外部,通过弹簧的弹力的作用,接触部42与凹槽61内的触点62紧密接触。电路板60上设置的凹槽61也为组装提供便利,可以实现盲操作。
48.在一些实施例中,本公开实施例的相机模组100包括壳体10和设置于壳体10内的镜头20,镜头20与镜头驱动件连接,镜头驱动件能够驱动镜头移动。例如,镜头驱动件可以驱动镜头沿着光轴方向相对于图像传感器移动,以实现自动对焦。对焦功能可通过终端设备内的处理芯片(ap/soc)发送控制指令至电路板60上的驱动电路(driver ic),通过驱动电路控制流入音圈马达的线圈的电流大小,来调整镜头对焦(af)所需的位移量。又例如,镜头驱动件可以驱动镜头移动至与光轴任意方向偏转所需角度,以实现自动防抖。镜头的防抖功能(ois)可通过设置在终端设备内部的陀螺仪(gyro)获取抖动偏移信息,终端设备内部的驱动电路(driver ic)根据抖动偏移信息计算出因抖动产生的偏移量及偏移方向,从而根据抖动偏移量及偏移方向控制音圈马达(voice coil actuator)驱动力,以补偿抖动偏移量及偏移方向,从而达到防抖的目的。
49.镜头可以包括镜筒以及设置于镜筒内的一个或多个透镜。镜筒包括物侧和像侧,
面向待拍摄物体的一侧为物侧,靠近图像传感器的一侧为像侧。镜筒的外形可以呈中空管状,具有中心轴,其内壁可形成有多个呈阶梯状的环形承载面,用于承接各种光学元件,光学元件例如可以是各种透镜(如凸透镜或凹透镜)、光圈、遮光件、扩散片等用于改变光线性质或折射路径的光学元件,在镜筒内可选择性的配置上述各光学元件。
50.图像传感器固定在电路板60上,用于接收经镜头折射汇聚后的入射光以进行成像,将光学图像转换成电信号。图像传感器可以是电荷耦合器件(charge coupled device,ccd)或者互补金属氧化物半导体(complementary metal oxide semiconductor,cmos)。
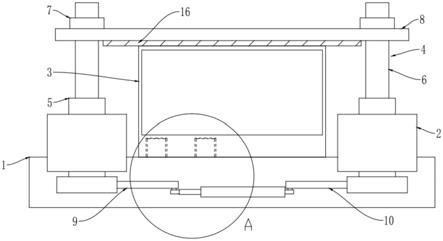
51.基于相同的构思,本公开实施例还提供一种终端设备200,如图5所示,终端设备200包括上文中任一实施例提到的相机模组100。终端设备200可以是智能手机、平板电脑、笔记本电脑、诸如智能手环及智能手表等可穿戴设备、照相机、摄像机、行车记录仪等。
52.以智能手机为例,可以包括外壳210和设置于外壳210前方的显示屏。相机模组100可以设置于外壳210后方,作为智能手机的后置摄像头使用。相机模组100也可以固定在外壳210的前方,作为智能手机的前置摄像头使用。来自待拍摄物体的光线经由相机模组100的镜头折射调整后,再投射到图像传感器,图像传感器将光信息转换成数字信息,再经过智能手机内部处理器处理,呈现于屏幕上。无论相机模组100作为智能手机的前置摄像头还是后置摄像头,相机模组100的数量可以是一个或者多个。
53.本公开实施例的终端设备200,通过配置本公开实施例的相机模组100,相机模组100的引脚40与电路板60上的触点62抵接的方式,实现镜头驱动件与电路板60之间的电导通。相较于焊接的方式,一方面无需使用焊接设备及焊接材料(如焊锡),节约成本。另一方面,降低了报废率,易于返修及安装。
54.通过弹性部将引脚40的接触部紧紧抵于电路板60上的触点62,使得接触部42与触点62接触更充分稳固,提高连接可靠性,确保终端设备200的拍照摄像功能。
55.可以理解的是,本公开中“多个”是指两个或两个以上,其它量词与之类似。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
56.进一步可以理解的是,术语“第一”、“第二”等用于描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开,并不表示特定的顺序或者重要程度。实际上,“第一”、“第二”等表述完全可以互换使用。例如,在不脱离本公开范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。
57.进一步可以理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。
58.进一步可以理解的是,除非有特殊说明,“连接”包括两者之间不存在其他构件的直接连接,也包括两者之间存在其他元件的间接连接。
59.进一步可以理解的是,本公开实施例中尽管在附图中以特定的顺序描述操作,但是不应将其理解为要求按照所示的特定顺序或是串行顺序来执行这些操作,或是要求执行
全部所示的操作以得到期望的结果。在特定环境中,多任务和并行处理可能是有利的。
60.本领域技术人员在考虑说明书及实践这里公开的实施例之后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利范围指出。
61.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利范围来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。