技术特征:
1.一种自主移动叉车,其特征在于,包括:车体,其包括车主体及设置于所述车主体一侧的叉齿部;图像采集单元,设置在所述车主体上,用于采集目标对象的第一图像;控制器,与所述图像采集单元电连接,用于获取所述图像采集单元采集的所述第一图像;根据所述第一图像,确定与所述目标对象的位姿相关的目标信息;根据所述目标信息,调整所述自主移动叉车的位姿,以使所述叉齿部对准所述目标对象底部的对接部;所述自主移动叉车的位姿调整完成后,控制所述自主移动叉车以其调整后的姿态朝所述目标对象移动,以使所述叉齿部与所述目标对象底部的对接部对接。2.根据权利要求1所述的自主移动叉车,其特征在于,所述叉齿部设置于所述车主体的第一侧面;所述图像采集单元设置于所述车主体的第一侧面。3.根据权利要求1所述的自主移动叉车,其特征在于,所述车主体的顶部设有固定朝向于所述叉齿部所在侧的所述图像采集单元;或者所述车主体的顶部设有旋转机构,其一端与所述车主体的顶部连接,另一端上设有所述图像采集单元;所述控制器,还与所述旋转机构电连接,用于控制所述旋转机构沿设定方向旋转,以旋转至使所述图像采集单元朝向所述叉齿部所在侧。4.根据权利要求1至3中任一项所述的自主移动叉车,其特征在于,还包括:传感器,设置在所述叉齿部上;所述控制器,与所述传感器电连接,用于获取所述传感器探测到的有关所述目标对象的第一探测数据;根据所述第一图像和所述第一探测数据,确定与所述目标对象的位姿相关的目标信息。5.根据权利要求4所述的自主移动叉车,其特征在于,所述传感器设置于所述叉齿部的远离所述车主体的远端。6.根据权利要求4所述的自主移动叉车,其特征在于,所述传感器为测距传感器。
技术总结
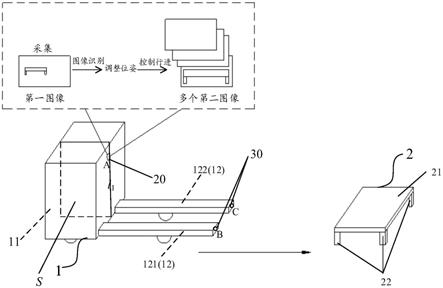
本实用新型提供一种自主移动叉车。其中,自主移动叉车包括:车体,其包括车主体及设置于车主体一侧的叉齿部;图像采集单元,设置在车主体上,用于采集目标对象的第一图像;控制器,与图像采集单元电连接,用于获取图像采集单元采集的所述第一图像;根据所述第一图像,确定与所述目标对象的位姿相关的目标信息;根据所述目标信息,调整所述自主移动叉车的位姿,以使所述叉齿部对准所述目标对象底部的对接部;所述自主移动叉车的位姿调整完成后,控制所述自主移动叉车以其调整后的姿态朝所述目标对象移动,以使所述叉齿部与所述目标对象底部的对接部对接。本实用新型提供的技术方案,自主移动叉车能够实现与目标对象精准对接,且结构简单,成本低。成本低。成本低。
技术研发人员:成鹏 齐欧 张硕
受保护的技术使用者:灵动科技(北京)有限公司
技术研发日:2021.06.08
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。