1.本实用新型涉及医疗器械技术领域,尤其涉及一种缝合装置。
背景技术:
2.二尖瓣关闭不全是当今最常见的瓣膜病变之一,会造成二尖瓣反流,其主要原因有二尖瓣环扩张、腱索功能不全、二尖瓣粘液变性、瓣叶脱垂、风湿性心瓣膜病、缺血性病变等。其中,瓣环成形术是目前解决二尖瓣反流,尤其是瓣环扩张引起的反流的主要方法之一。
3.传统的外科瓣环成形术是用传统的表皮缝合方式在瓣环上缝合线,即靠操作者用止血钳夹住缝合针,靠腕力在瓣环圆周方向的组织上分别缝合穿线,再将缝合线分别穿过人工瓣环,最后缝合线收紧将人工瓣环固定在二尖瓣环上,完成外科瓣环成形术。这种外科手术方式需要对患者全身麻醉,打开胸腔并将患者心脏停跳建立体外循环条件下才能操作,对于操作者的经验和技巧要求较高,操作困难,在缝合过程中存在缝合深度、针距不均匀情况的问题。术后患者创伤非常大,预后非常难,大多数病人都难以耐受。
4.现有技术公开了一种介入式缝合装置,在缝合过程中,驱动带倒钩的穿刺针刺穿待缝合组织后,倒钩在穿刺针的卡线槽处钩住缝合线,然后进行回转运动,以使缝合线从卡线槽处沿穿刺针的运动轨迹穿过待缝合组织。该缝合装置的驱动方式为连杆式,连杆驱动机构存在死点,导致穿刺针的旋转角度不能达到180
°
,而且该驱动方式需要将待缝合组织挤压进入卡线槽进行缝合,会损伤组织、跨度小、不易定位。
技术实现要素:
5.为了解决上述技术问题或者至少部分地解决上述技术问题,本实用新型提供了一种缝合装置。
6.本实用新型实施例提供的缝合装置,包括壳体、穿刺组件和驱动组件,所述穿刺组件和所述驱动组件均设在所述壳体的远端,所述穿刺组件包括穿刺针,所述穿刺针由金属材料制成,所述驱动组件包括转动件和驱动件,所述转动件与所述穿刺针固定连接,所述驱动件与所述转动件以带传动的方式连接,所述驱动件用于驱动所述转动件转动以带动所述穿刺针转动。
7.本实用新型实施例提供的上述技术方案与现有技术相比具有如下优点:
8.本实用新型实施例提供的缝合装置,驱动件以带传动的方式驱动转动件转动,从而带动穿刺针转动以穿刺待缝合组织,穿刺针可以转动超过180
°
,方便操作,而且带传动的驱动方式使得穿刺针可以贴合待缝合组织进行穿刺缝合,容易定位、不会造成损伤、且针距跨度也可以更大。
附图说明
9.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的
实施例,并与说明书一起用于解释本实用新型的原理。
10.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
11.附图中:
12.图1是本实用新型实施例一提供的缝合装置的结构示意图;
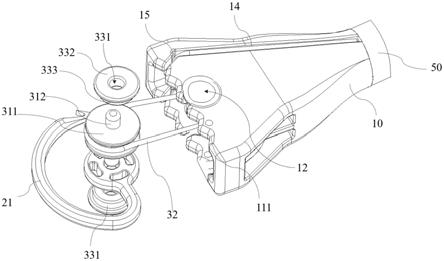
13.图2为图1中a部分的局部放大图;
14.图3为图1中a部分的局部放大透视图;
15.图4为图1中a部分的一具体实施方式中的局部放大透视图;
16.图5为图1中a部分的分解示意图;
17.图6至图9为本实用新型实施例一提供的穿刺针的具体实施方式结构示意图;
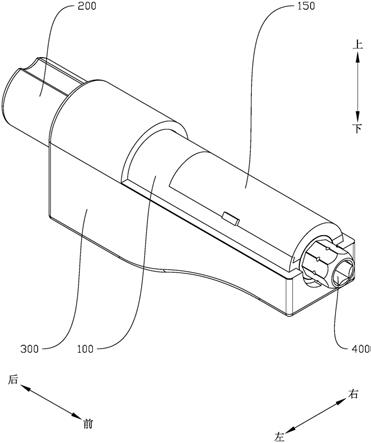
18.图10为本实用新型实施例一提供的缝合装置在一具体实施方式中的结构示意图;
19.图11至图14为本实用新型实施例一提供的缝合装置的操作示意图;
20.图15至图19为缝合装置对二尖瓣瓣瓣环组织进行缝合的操作示意图;
21.图20和图21为缝合线的打结方式示意图;
22.图22和图23为缝合线的另一打结方式示意图;
23.图24至图26为缝合线的又一打结方式示意图;
24.图27为本实用新型实施例二提供的驱动组件的结构示意图;
25.图28为本实用新型实施例二提供的驱动组件的另一结构示意图;
26.图29为本实用新型实施例三提供的驱动组件的结构示意图;
27.图30为本实用新型实施例三提供的驱动组件的另一结构示意图;
28.图31为本实用新型实施例四提供的穿刺针的结构示意图;
29.图32至图37为本实用新型实施例四提供的缝合装置的操作示意图。
具体实施方式
30.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。以下描述中,需要理解的是,“前”、“后”、“上”、“下”、“左”、“右”、“纵”、“横”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“头”、“尾”等指示的方位或位置关系为基于附图所示的方位或位置关系、以特定的方位构造和操作,仅是为了便于描述本技术方案,而不是指示所指的装置或元件必须具有特定的方位,因此不能理解为对本实用新型的限制。
31.还需要说明的是,除非另有明确的规定和限定,“安装”、“相连”、“连接”、“固定”、“设置”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。当一个元件被称为在另一元件“上”或“下”时,该元件能够“直接地”或“间接地”位于另一元件之上,或者也可能存在一个或更多个居间元件。术语“第一”、“第二”、“第三”等仅是为了便于描述本技术方案,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”、“第三”等的特征可以明示或者隐含地包括一个或者更多个该特征。对于本领域的普通技术
人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
32.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本实用新型实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本实用新型。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本实用新型的描述。
33.在本实用新型的描述中,需要说明的是,在介入医疗器械领域,近端是指距离操作者较近的一端,而远端是指距离操作者较远的一端;轴向是指平行于医疗器械远端中心和近端中心连线的方向。上述定义只是为了表述方便,并不能理解为对本实用新型的限制。
34.实施例一
35.参考图1
‑
图21,本实用新型实施例一提供的缝合装置100包括壳体10、穿刺组件20和驱动组件30。穿刺组件20和驱动组件30均设在壳体10的远端。穿刺组件20包括穿刺针21,驱动组件30包括转动件31和驱动件32,转动件31与穿刺针21固定连接,驱动件32与转动件31以带传动的方式连接。驱动件32用于驱动转动件31转动以带动穿刺针21转动。这样,驱动件32以带传动的方式驱动转动件31转动,从而带动穿刺针21转动以穿刺待缝合组织4,穿刺针21可以转动超过180
°
,操作方便。而且带传动的驱动方式使得穿刺针21可以贴合待缝合组织4进行穿刺缝合,容易定位、不会造成损伤、且穿刺针21的针距跨度也可以更大。
36.具体地,参考图2至图4,壳体10设有开口11,穿刺组件20和驱动组件30容置在壳体10内,穿刺针21可转动地自开口11伸出。驱动组件30可以驱动穿刺针21从开口11伸出,同样的,驱动组件30也可以驱动穿刺针21回退至壳体10内。这样,穿刺针21可以进行超过180
°
的转动,而且驱动件32以带传动的方式驱动转动件31转动,带传动方式传动平稳,穿刺针21可以贴合待缝合组织4进行穿刺缝合,从而使得缝合装置100容易定位、不会对待缝合组织4造成损伤,且穿刺针21的针距跨度也可以更大。
37.开口11的端面设有抵接部111。抵接部111的形状可以设置为齿状结构,以增加缝合装置100与待缝合组织4之间的摩擦力,便于穿刺针21穿刺。可以理解,具体应用中,抵接部111的形状不限于齿状结构,还可以是沿径向向外延伸的喇叭形、或者是向远端延伸的倒刺或者是向远端延伸的吸盘。当然,也可以在抵接部111中增设真空负压装置,只要可以增加缝合装置100与待缝合组织4之间的摩擦力即可。
38.参考图5,壳体10相对的两个侧壁在靠近抵接部111处分别开设有定位孔12,定位孔12用于连接转动件31。壳体10相对的两个侧壁上的定位孔12分别用于连接转动件31的两端。转动件31通过两个定位孔12与壳体10转动连接,而转动件31与穿刺针21固定连接。这样,在穿刺针21转动时,穿刺针21穿刺到待缝合组织4时不容易产生晃动,不会造成损伤。
39.壳体10相对的两个侧壁分别设有至少一个限位孔13,限位孔13位于定位孔12的旁侧,限位孔13穿设有限位件(图未示)。驱动组件30驱动穿刺针21在初始位置和预设位置之间转动。驱动组件30驱动穿刺针21从初始位置转动至预设位置,即进行穿刺待缝合组织;驱动组件30驱动穿刺针21从预设位置转动回退至初始位置,即将穿刺针21收回壳体10内。具体地,限位孔13的数量可以设置为两个,即壳体10相对的两个侧壁分别设有一个对应的限位孔13用于穿设一个限位件。限位件用于对穿刺针21在初始位置或预设位置的转动进行限位。当然,限位孔13的数量可以设置为四个,即壳体10相对的两个侧壁分别设有两个对应的限位孔13用于穿设两个限位件。两个限位件分别对穿刺针21在初始位置和预设位置的转动
进行限位。当壳体10相对的两个侧壁分别设有两个对应的限位孔13时,每个侧壁的两个限位孔13分别设于定位孔12两侧,使得穿刺针21在初始位置和预设位置之间的转动角度大于或等于180
°
。
40.当穿刺针21从初始位置转动至预设位置时,其中一个限位件抵持穿刺针21,该限位件的作用是限制穿刺针21的转动角度,防止穿刺针21转出过多的角度而损伤待缝合组织4。当穿刺针21从预设位置回退至初始位置时,另一个限位件抵持穿刺针21,该限位件的作用是限制穿刺针21的回退角度,使穿刺针21完全位于壳体10内。
41.需要说明的是,初始位置即穿刺针21全部容置于壳体10内的位置(见图11),预设位置即穿刺针21从壳体10的开口11穿出的最大位置,即穿刺针21穿入待缝合组织4中的最大位置(见图12)。
42.参考图5,转动件31包括转动轮311和转轴312,转轴312分别贯穿转动轮311、穿刺针21和定位孔12,驱动件32盘绕在转动轮311的周向。可以理解,转轴312分别与转动轮311和穿刺针21固定连接,如激光焊接,使得转轴312与转动轮311不可相对转动,同时转轴312与穿刺针21也不可相对转动,转轴312与定位孔12转动连接。这样,通过驱动件32驱动转动轮311带动转轴312转动,转轴312带动穿刺针21一起转动,使得驱动组件30对穿刺针21的伸出和回退范围控制地更加精确。穿刺针21在整个转动过程中,能够平稳地穿入待缝合组织4进行穿刺缝合。且穿刺完成后,可以通过驱动件32控制穿刺针21平稳地回退,避免传动不及时,对待缝合组织4造成损伤。
43.具体地,驱动件32可以为钢缆,转动轮311包括轮轴和设于轮轴两端的圆盘,钢缆盘绕在轮轴的周向并位于轮轴两端的圆盘之间。这样,驱动件32通过带传动的方式带动转动件31转动,拉动钢缆即可带动转动轮311转动,这种传动方式传动平稳,且易于控制。
44.继续参考图4,转动轮311的周向与驱动件32之间设有摩擦增强件313。摩擦增强件313可以增加驱动件32与转动轮311之间的摩擦力,以提高转动轮311的传动力。优选地,摩擦增强件313可以设置为转动轮311沿外缘凸设的一圈规则的齿状结构。这样,转动轮311与驱动件32之间的传动更为平稳,提高传动性能,避免穿刺针21对待缝合组织4的损伤。
45.进一步地,驱动组件30包括固定件33。固定件33的数量为两个,转轴312的两侧分别与两个固定件33相连并固定在壳体10。固定件33上设置有通孔331,转轴312的两侧分别穿过通孔331,这样实现转轴312与固定件33的固定。固定方式可以是通过激光焊接等常规方式进行固定。具体地,固定件33包括设置在壳体10外侧的凸耳332和卡合于定位孔12的凸轴333。固定件133的通孔331贯穿凸轴333和凸耳332,转轴312穿设通孔331并与凸轴333转动连接。固定件33的凸轴333套在壳体10的定位孔12上,凸轴333刚好和定位孔12配合,凸耳332不能通过定位孔12,而固定件33和壳体10焊接固定。这样,转轴312就只能沿定位孔12的轴心转动,而不可以沿壳体10的轴向运动,从而带动穿刺针21在壳体10中以转轴312为转动轴相对于壳体10转动。
46.参考图6至图9,穿刺组件20包括穿刺针21和钩线件。穿刺针21收容在壳体10的远端,并可自壳体10的开口11处伸出,从而穿刺待缝合组织4。穿刺针21呈弧形,穿刺针21的一端设有针尖212,穿刺针21的另一端设有中心孔213,中心孔213与转轴312固定连接。具体的,穿刺针21包括针身211,针身211整体呈弧形,针身211的一端设有针尖212,针尖212可以旋转穿刺到待缝合组织4中。针身211的另一端开设有中心孔213,中心孔213与转轴312固定
连接。
47.具体地,穿刺针21能够完成跨度为6mm、深度为3.5mm的运动,相应的,针身211设置为半径为3.5mm,弧度为π(即180
°
)的圆弧形结构。针身211可以设置成截面为圆形的标准圆弧形结构,这样使得穿刺针21的针身211不容易对待缝合组织4造成损坏。针身211也可设置成截面为多边形的标准圆弧形结构,从而在穿刺针21刚进入待缝合组织4时,保证针身211的稳定性。优选的,针身211的截面可以设置为菱形,从而提供给穿刺针21更大的穿刺力度。
48.穿刺针21可由金属材料制成。进一步地,穿刺针21可以采用镍钛、不锈钢等适于接触血液的材料制成,优选不锈钢材料。由于血液中的血红蛋白或血小板所含的铁离子浓度较高,当穿刺针21的材料为不锈钢材料,不锈钢材料与血液中的成分相似度较高,穿刺针21与待缝合组织4之间不容易产生排斥反应,降低缝合过程中的风险。
49.钩线件用于在穿刺针21转动穿刺待缝合组织4后钩住缝合线5。钩线件设于穿刺针21上,钩线件可为倒钩210或分叉尖端。较佳地,倒钩210或分叉尖端设于穿刺针21的针尖212处。参考图2,壳体10还包括容线腔14和与容线腔14的远端连通的卡线槽15。缝合线5设于容线腔14中并卡设于卡线槽15内。倒钩210或分叉尖端用于在穿刺针21转动穿刺待缝合组织4后钩住卡线槽15内的缝合线5。
50.具体地,钩线件为倒钩210,倒钩210的缺口深度小于或者等于缝合线5的直径。倒钩210的缺口深度设置为刚好卡住缝合线5的直径,使得缝合线5的自由端不能从倒钩210处滑脱,同时使得缝合线5能够填充倒钩210的缺口。这样,在回退穿刺针21时,倒钩210不会钩住待缝合组织4。实际应用中,倒钩210可以设置在针身211的弧形外侧,也可设置在针身211的弧形内侧。进一步地,倒钩210的形状可以设置为弧形,也可以设置为鱼刺形,这样方便钩住缝合线5。
51.参考图1和图10,缝合装置100还包括操作组件40和连接壳体10近端的管体50,操作组件40连接于管体50的近端。驱动件32自管体50穿出,操作组件40连接驱动件32。这样,可通过操作组件40操作驱动件32驱动转动件31转动,从而带动穿刺针21转动,方便操作。具体地,驱动件32包括两个驱动端321,操作组件40包括两个滑块41,两个滑块41与两个驱动端321一一对应连接。如此,通过分别操作两个滑块41,可使驱动件32驱动转动件31顺时针转动或逆时针转动。可以理解,管体50的近端连接有手柄60,两个滑块41设于手柄60上,方便操作,当操作滑块41滑动时可以带动驱动件32运动。
52.管体50与壳体10的容线腔14连通,缝合线5穿设于管体50和容线腔14中。进一步地,壳体10的宽度可从远端至近端逐渐减小,这样可以降低管体50的直径,且容易密封管体50。当然,也可以设置壳体10的宽度与管体50的直径相等,这样,壳体10无需设置过渡的台阶,便于安装缝合线5及推送缝合装置100。
53.具体地,壳体10可由高密度聚乙烯(high density polyethylene,简称为“hdpe”)、聚醚醚酮(poly ether ether ketone,简称“peek”)等医用高分子材料制成,以便于加工并减轻重量,利于输送。
54.请参考图11至图14,示出了实施例一的缝合装置100穿刺待缝合组织4并将缝合线5穿设在待缝合组织4上的运动路径。
55.首先,参考图11,缝合装置100的壳体10贴合待缝合组织4,穿刺针120处于初始位置,缝合线5穿设在壳体10的容线腔14中并被卡线槽15卡住。
56.然后,参考图12,穿刺针21穿过待缝合组织4并钩住缝合线5。具体地,控制驱动组件30驱动穿刺针21沿b1方向转动一定角度至预设位置完成穿刺,穿刺针21上设有的倒钩210将缝合线5钩住。
57.其次,参考图13,穿刺针21沿穿刺路径回退并带回缝合线5。具体地,驱动组件30驱动穿刺针21沿b2方向转动,使得穿刺针21回退到初始位置,缝合线5也一并被穿刺针21钩住沿穿刺路径带回。
58.最后,参考图14,穿刺针21钩住缝合线5整体后撤缝合装置100离开待缝合组织4,将缝合线5穿设在待缝合组织4上。具体地,缝合装置100沿b3方向(即向近端)后撤。后撤缝合装置100后,壳体10离开待缝合组织4,使得缝合线5缝合在待缝合组织4上。在后撤缝合装置100的过程中,缝合线5被倒钩210钩住,此时穿刺针21上的倒钩210位于壳体10内,缝合线5不会自动从倒钩210上脱落。当缝合装置100撤出体外时,此时缝合线5也被拉至体外,需要驱动手柄42将穿刺针21推出,从而使缝合线5从倒钩210上脱落;或者借助工具使缝合线5从倒钩210上脱落。
59.本实施例一的缝合装置100,可用于二尖瓣或三尖瓣的瓣环成形术。以下以二尖瓣瓣环成形术为例,说明本实施例一提供的缝合装置100的使用过程。其中,待缝合组织4为二尖瓣瓣环组织3。在图示中,la表示左心房,lv表示左心室。
60.s1:参考图15,通过导丝(图未示出)和鞘管6等导引装置建立从患者体外到体内的轨道,本实施例中采用一根直的鞘管6,从患者左腋下和左心房各开一个小孔,鞘管6从小孔通过到达左房,从而建立轨道,将缝合装置100的远端沿着鞘管6穿过心房壁进入左心房la到达二尖瓣瓣环组织3的位置;
61.s2:参考图16,缝合装置100沿着鞘管6被送入左心房,并使缝合装置100的壳体10远端贴合二尖瓣瓣环组织3,然后驱动穿刺针21穿刺二尖瓣瓣环组织3,然后穿刺针21上的倒钩210钩住缝合线5,回退穿刺针21将缝合线5沿穿刺路径带回并后撤缝合装置100,这样就使得缝合线5穿设在二尖瓣瓣环组织3上。
62.s3:参考图17至图19,为缝合装置100将多组缝合线5缝合在二尖瓣瓣环组织3上,通过收缩多组缝合线5将二尖瓣瓣环组织3缩紧来实现二尖瓣瓣环组织3成形。
63.参考图20和图21,为二尖瓣瓣环组织3成形方式一,通过每组缝合线5之间两两打结,来使二尖瓣瓣环组织成形;
64.参考图22和图23,为二尖瓣瓣环组织3成形方式二,通过多组缝合线5一起打结,来使二尖瓣瓣环组织成形;
65.参考图24至图26,为二尖瓣瓣环组织3成形方式三,沿每组缝合线5送入人工成形环7,然后每组缝合线5两两打结使人工成形环7与二尖瓣瓣环组织3固定从而使二尖瓣瓣环组织3成形。
66.实施例二
67.参考图27和图28,与实施例一的缝合装置100相比,本实用新型实施例二的缝合装置的区别在于,转动轮610的周向设有限位环612,驱动件611穿设限位环612并盘绕在转动轮610的周向。这样,驱动件611盘绕在转动轮610上,限位环612可变形固定住驱动件611从而将驱动件611固定在转动轮610上,牵拉驱动件611即可带动转动轮610转动。驱动件611与转动轮610的连接稳定,带传动效果好。
68.实施例三
69.参考图29和图30,与实施例一的缝合装置100相比,本实用新型实施例三的缝合装置的区别在于,转动轮711沿径向开设有贯穿转动轮711的轴孔7111,驱动件72穿设在轴孔7111中并盘绕在转动轮711的周向。具体地,驱动件72穿过轴孔7111,然后沿转动轮711圆周盘绕回来,再次从轴孔7111穿过,形成一个圈套贴服在转动轮711的圆周上。这样,将驱动件72固定在转动轮711上,牵拉驱动件72即可带动转动轮711转动。驱动件72与转动轮711的连接稳定,带传动效果好。
70.实施例四
71.参考图31至图37,与实施例一的缝合装置100相比,本实用新型实施例四的缝合装置800的区别在于,钩线件设于壳体810内,钩线件用于在穿刺针812转动穿刺待缝合组织4后钩住缝合线5。
72.钩线件设于壳体810内,钩线件为凸台811,穿刺针812的针尖设有穿线孔813,穿线孔813预设有缝合线5,凸台811用于在穿刺针812转动穿刺待缝合组织4后钩住穿刺针812上的缝合线5。凸台811设置在壳体811的远端。
73.请参考图32
‑
图37,示出了实施例四的缝合装置800穿刺待缝合组织4并将缝合线5穿设在待缝合组织4上的运动路径。
74.首先,参考图32,缝合装置800的壳体810贴合待缝合组织4,穿刺针812处于初始位置,缝合线5位于管体内且缝合线5穿设于穿刺针812的穿线孔813中;
75.然后,参考图34和图35,驱动驱动组件使穿刺针812转动至预设位置完成穿刺,即穿刺针812沿着e1方向进行转动。由于穿刺针812的穿线孔813预设有缝合线5,穿刺针812在穿刺的过程中将缝合线5穿过待缝合组织4并带着缝合线5滑过凸台811并被卡住,进而驱动穿刺针812回退到初始位置,即穿刺针812沿着e2方向回退回初始位置。
76.最后,参考图37,后撤缝合装置800,使壳体811离开待缝合组织4,即将缝合装置800沿着e3方向后退,使得缝合线5缝合在待缝合组织4上。在后撤缝合装置800的过程中,缝合线5不会从凸台811上脱落。当缝合装置800撤出人体外时,此时缝合线5也被拉至体外,可借助工具使缝合线5从凸台811上脱落。这样,完成了待缝合组织4的缝入缝合线5。
77.可以理解的,以上实施例仅表达了本实用新型的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,可以对上述技术特点进行自由组合,还可以做出若干变形和改进,这些都属于本实用新型的保护范围;因此,凡跟本实用新型权利要求范围所做的等同变换与修饰,均应属于本实用新型权利要求的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。