一种基于lora物联网行李防丢防盗装置与方法
技术领域
1.本发明涉及基于物联网的移动物品安全监控技术。尤其涉及一种远距离低功耗无线移动物品监控防丢防盗系统和方法。
背景技术:
2.居民外出旅行、公务出差、探亲访友经常携带多个行李,需要适时地对行李进行监测,防止行李丢失或者被盗。在电子装置小件行李的防丢防盗常用的方式是使用短距离无线蓝牙通讯的方式,即通过一对蓝牙接收和发送装置是否靠近和远离检测电子设备是否丢失,例如常见的手机防盗器在手机中植入一个app软件,在手机外部有一个蓝牙收发部件,蓝牙收发装置定时查询是否有手机蓝牙信号来检测手机是否丢失。这种蓝牙防盗器的方式作用距离近,不适合人们外出旅行携带大件行李使用。并且蓝牙通讯一对一配对使用,不适合于个人携带多件行李背包。gps全球卫星定位系统(北斗全球卫星定位)也经常用于防丢防盗应用中,在汽车、金属加工机床等大型设备中使用,但是gps定位系统体积较大,室内信号弱,不适合机场、高铁站等室内使用。
3.公开号cn102243796a的发明专利提到使用rfid技术进行防丢防盗,rfid可以用于钱包、卡包等随身物品的防丢防盗,但rfid作用距离较短只能在1米只能起作用,并且rfid随着作用距离增加,天线面积急剧增大,并且rfid功耗比较大,不适用于移动应用使用。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供一种基于lora物联网行李防丢防盗装置与方法。
5.本发明通过以下技术方案来实现上述目的:一种基于lora物联网行李防丢防盗装置,包含一个主机终端和多个从机终端,主机终端和从机终端使用星型结构的网络拓扑方式连接,其中,主机终端和从机终端使用lora无线模块进行通讯;主机终端和从机终端都包括微控制器、以及和微控制器电性相连的lora无线模块、9轴运动传感器、锂电池升压调理模块、电容触摸开关、报警模块;主机终端由个人随身携带,从机终端安装在行李箱或者背包内,使电容触摸开关贴装在行李箱的内表面。
6.进一步的从机终端被唤醒方式包括:主机发送消息,lora模块收到消息后,发送中断事件信号唤醒从机终端微控制器,或者安装从机终端的行李物品有一个静止到运动状态变化或者受到剧烈碰撞后使用9轴运动传感器发出运动中断信号唤醒从机终端。
7.一种基于lora物联网行李防丢防盗方法,其中,
8.步骤一:主机终端将主机的当前时间发送给从机终端,在从机终端建立相对时间坐标系;
9.步骤二:主机每隔固定时间发送消息给从机终端,从机终端使用九轴运动传感器计算出自身相对于初始坐标原点的空间方位角,发送给主机,主机终端获得从机终端应答后,读取接收到从机终端信息的信号强度指示值rssi,主机终端使用空间方位角和rssi指
标估算从机终端的相对位置;
10.步骤三:从机终端若在设置的次数内没有做出应答,则在主机终端上判断行李物品的安全状态程度,分等级设置报警输出。
11.进一步的,步骤二中所述空间方位角ψ的计算:
12.当加速度变换值
△
g
p
大于设定的运动阈值g
t
,系统使用三轴陀螺仪数据计算物品的瞬时横滚角θ
g
和俯仰角γ
g
,当
△
g
p
小于设定的运动阈值g
t
,系统使用三轴加速度传感器数据计算物品稳态横滚角θ
c
和俯仰角γ
c
,g
t
是确定静止还是运动的门限值,计算出这两个分量θ和γ后,使用公式将三轴磁力传感器测得的数据m
r
转换成大地坐标系下三轴磁力传感器数据m
g
,最后从机终端的空间方位角使用公式计算得到。
13.进一步的,步骤二中所述空间方位角在物体静态时的倾角向量计算方法为:倾角向量包含横滚角θ
c
和俯仰角γ
c
,在静止状态下物品的倾角横滚角θ
c
,θ
c
=arcsin(g
px
)和俯仰角γ
c
,g
px
是x方向的加速度值,g
py
和g
pz
是y方向和z方向的加速度值,单位是重力加速度。
14.进一步的,步骤二中所述空间方位角在物体移动时的倾角向量计算方法为:以固定时间间隔δt读取三轴陀螺仪数据ax,ay,az,对三轴陀螺仪数据依据
15.下式进行积分,
16.进一步的,所述步骤三中安全状态程度判断方法:对主机终端和行李物品从机终端之间的振动加速度幅度av,移动速度变化量dv和空间距离ddis三个指标进行归一化处理,然后进行输出决策判断行李物品的安全状态程度。
17.进一步的,所述归一化处理过程,当行李物品的位置发生变动时,主机终端请求从机终端发送振动加速度数值av,振动加速度幅度av采用三轴加速度传感器的的合加速度作为指标:其中ax,ay,az分别是三轴加速度传感器的三轴加速度数据;
18.移动速度变化量dv的计算方法是,采用rssi和空间方位角计算空间距离变化量,即移动速度v,然后根据前后时刻的速度v2和v1,计算速度变化量dv,dv=v2‑
v1;
19.空间距离ddis的计算采用空间方位角和rssi数值代表的径向距离rs计算得到,ddis=rs*sinψ。
20.进一步的,移动速度变化量dv,振动加速度幅度av和空间距离ddis所处的物理空
间不同,单位和范围各不相同,依据公式对其进行标准化,x是输入实际物理量,x
max
和x
min
是实际物理量的上下限,x0是实际物理量的平均值。
21.进一步的,所述输出决策使用径向基rbf神经网络输出,神经网络的输出编码对应不同级别的警报状态。
22.与现有技术相比,本发明的有益效果如下:本发明的防丢防盗系统安装简便,成本低廉,功耗低,主从机之间直接通讯,使用成本低。系统使用扩频通讯技术,功耗与蓝牙和wifi以及rfid相比是后者的五分之一到六分之一。况且rfid不能做到移动应用一个主机连接多个从机终端,本系统中一个旅客可以自身监测多件行李。从机终端和主机终端内部使用九轴运动传感器计算自身的空间方位角,主从机终端之间在常规模式下可仅传输空间方位角一个数据,降低了数据发送量,另外主机终端使用无线接收强度指示rssi指标估算的主从机终端之间的径向距离。通过空间方位角以及rssi指标估算的径向距离,判断主机和从机终端的空间相对位置,速度变化,实现了低功耗和低延时的状态监测。系统报警状态输出使用了多个状态变量进行安全状态计算,根据物品状态情况控制微控制输出不同的报警声音信息。
附图说明
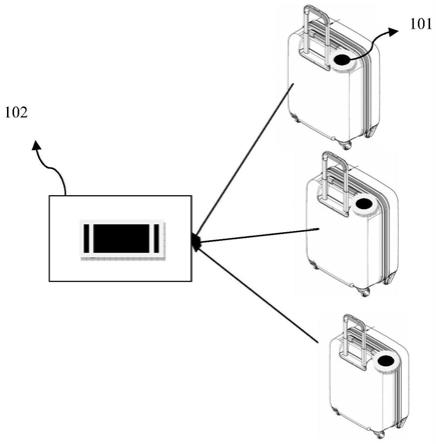
23.图1是本发明防丢防盗装置配置图;
24.图2是本发明系统功能模块图;
25.图3主机和从机的终端供电结构图;
26.图4行李端从机运行流程图;
27.图5主机工作流程图;
28.图6主机和从机模块的电路图;
29.图7行李物品运动状态计算流程图;
30.图8新的从机终端和主机建立连接的过程示意图;
31.附图标记说明如下:101:从机终端;102:主机终端。
具体实施方式
32.下面结合附图对本发明作进一步说明,实施例1:
33.本专利系统组成如图1所示,包含一个主机终端和多个从机终端,从机终端可以多达16个,主机终端和从机终端使用扩频技术的lora无线模块进行无线短消息类型的数据通讯。主机终端由个人随身携带,从机终端安装在行李箱或者背包内。主机终端和从机终端使用星型结构的网络拓扑连接方式,即主机终端作为中心节点,从机终端作为子节点。主机终端和从机终端均使用图2所示的硬件结构。在实施例中行李箱或者背包不能是完全密闭金属材质,从而本专利装置可以应用到绝大部分行李箱和背包。以下命名行李内的从机为终端行李监测“从机终端”。系统装置工作过程为:从机上电后即进入休眠待机状态,当行李持
有人使用电容触摸开关启动行李监测从机终端,行李物品内的从机终端设置运动传感器、lora无线模块,零点坐标和坐标系初始角度。初始化上电后从机终端进入待机状态,以便降低功耗。以上过程的电容触摸开关贴装在行李箱的内表面,为非接触类型,触摸开关可以感知6mm厚度之内的手指触摸行为,触摸开关传感原理是电容,对一般非导电物品的碰撞不敏感,触摸开关待机电流在15
‑
16ua,使用5v供电,待机功率为0.1mw,系统可以长时间待机。行李持有人在行李箱外表面触摸电容开关后,配置好设置后,从机终端进入待机等待状态,从机终端的唤醒有两种方式,一种是主机发送消息,lora模块收到消息后,发送中断事件信号到pa0端口唤醒主控制器,另外一种方式是行李物品有一个静止到运动状态变化或者受到剧烈碰撞后使用运动传感器发出运动中断信号唤醒从机终端。主机和从机的供电系统使用锂电池充放电系统,结构如图3所示。
34.本发明的实施例主机终端和从机终端之间的通讯采用短消息格式,短消息以数据帧为单位,每个数据帧包括节点地址,节点的功能协议号,寄存器起始地址,寄存器数据,校验码组成,具体格式如表1所示。
35.表1主从机短数据帧格式
[0036][0037]
主机终端和从机终端运行过程如图4和图5所示,移动行李中从机终端启动后设置传感器和通讯接口。然后进入待机状态,待机状态为低功耗的休眠状态,在待机时,当有手指靠近电容触摸开关,开关短路连通,开关输出高电平,因为开关输出连接到从机微处理器的唤醒引脚a0,从而唤醒从机终端,使得从机终端进入配置状态,在配置状态下配置运动传感器运动阈值,lora模块参数和零点坐标系,配置好后进入等待主机消息的待机状态。当主机消息到来后,唤醒从机终端的主控制器,发送响应消息给主机。另外从机终端在运动传感器检测到物品状态发生变化时,运动传感器也输出一个中断信号给控制器的pa0引脚,然后唤醒从机主控制器。
[0038]
用户的主机终端在正常工作状态下和从机建立通讯虚电路连接,主机终端重复检测n次,实施例默认是10次,若10次检测仍然没有得到从机的响应消息,系统进入报警状态。微处理器使用pwm定时器生成声频信号,驱动蜂鸣器发出报警声音。如图4所示,从机检测到接收到主机终端消息数据帧,解析主机命令,根据主机终端命令进行相应的处理,对于主机读命令,读出从机终端寄存器中的状态值发送给主机,对于主机写命令,将主机发送的数值写入相应的寄存器。若接收到的主机命令眠命令,从机设置睡眠状态寄存器有效,进入休眠状态,否则重复以上过程,从机循环检测是否有主机终端的消息存在。在从机终端进入休眠状态后,mcu只有备份寄存器和待机电路供电,pll,hsi,hse断开,寄存器和sram复位,除了唤醒引脚其余都处于高阻态,此时主机遥控失效,只可以被外部电容触摸开关唤醒。在从机进入休眠状态前,因为装置硬件输入io在没有输入时处于低电压状态,因此系统将所有的io输入引脚设置成ipd下拉状态,即通过内部下拉电阻下拉到地线上。这样mcu的待机功耗可以达到2ua的最小值。
[0039]
实施例主机和从机的内部电路模块如图6所示,601是移动电源供电和开机的电路,系统使用锂电池供电,602是蜂鸣报警电路,603是微处理器电路,604是三轴加速度传感器模块,605是lora无线通讯模块,606是电容触摸开关。系统启动的一种方式是当按下开关
按钮sb后,主控板上电,开关按钮sb按下保持1秒,微处理器检测到开关按下信号,然后微处理器发出保持信号,从机进入正常运行状态。系统启动的第二种方式是606的电容触摸开关激活从机硬件,电容开关可以间隔6mm感知物体靠近,因此实施例将电容开关放置在行李箱内壁,当物体接近后导通,触发系统启动,物体接近保持2秒后,603微处理器发出保持信号,从机进入正常运行状态。从机运行后,602发出连续3声短蜂鸣,提醒业主已经启动。
[0040]
图5是实施例中主机终端工作流程图,用户启动主机终端后,在屏幕上使用按钮选择一个从机设备,建立连接,如果主机终端尝试多次不能建立连接,安装相应从机终端的行李箱可能远离主机终端,然后主机提醒用户行李偏离过远。如果主机终端和从机终端能够建立连接,主机终端可以读取从机终端信息,主机终端按下按键1,读取从机终端的rssi信息,rssi是接收的信号强度指示,rssi值越小信号越弱,通过rssi值的大小判断远近,从而判断行李物品和业主个人的距离远近。系统报警信号由mcu的数字io驱动,当行李物品状态处于重度报警范围时,蜂鸣器的输出功率最大,设置输出声音频率为8000hz,而行李位置当处于较轻的报警范围区间时候,蜂鸣器的输出功率较大,并且输出声音频率为2000hz,当行李位置当处于轻的报警范围区间时候,蜂鸣器的输出功率较小,且输出声音频率为500hz。通过这种方法,当行李丢失的危险越大,发出的声音强度越大,并且越尖锐;而丢失风险小时,声音越低沉,并且强度小。装置通过这种方法进行进行行李物品的丢失危险程度的报警。
[0041]
在系统启动后,用户如果不需要使用此装置,点击主机的从机待机按钮,终止从机的正常运行,使得从机进入待机状态。从机重新激活需要使用电容触摸开关激活从机。从机激活后,主机和从机重新建立连接。为了在移动中跟踪行李物品的从机终端状态,本实施例的主机和从机硬件使用了九轴运动传感器,从机和主机连接后,主机发送时间戳给从机,时间戳是一个32bit字长整数类型的数据,因为是短时信息,取消年信息和月,因此时间戳包括日,小时、分钟、秒、分秒四种时间信息,每种时间信息占用6bit长度。主机将主机的当前时间发送给从机,在从机终端建立相对时间坐标系,主机终端和从机终端在同一时间坐标系进行运动姿态和位移的计算。主机定时查询行李在各个时间点的状态,同时主机计算出自身的空间位置,主机的空间位置和从机的空间位置进行相减,获得主机和从机的实际位置差。主机和从机的空间位置采用lora的rssi值和九轴运动传感器的数据融合计算出来。具体方法如下:主机发送一个位置查询消息给从机,从机发送空间方位角数值给主机,主机读取到空间方位角数值后,读取通讯消息的rssi值。读取到rssi值后,使用r=10((rssi
‑
a)/(10*n))计算式算法径向距离r,式中a是信号灵敏度参数,n是路径损耗因子,提前标定出来或者在现场设置成0.75
‑
1.5之间的一个数值。径向距离r计算后,就通过径向距离r和空间方位角可以定位从机行李物品的位置。而空间方位角度的计算方法具体如下:
[0042]
使用九轴运动传感器的三轴加速度传感器,和三轴的陀螺仪传感器动态检测物体的角速度,每隔0.1秒对角速度进行积分求得行李物体的实际相对于水平面的倾角向量。倾角向量包含横滚角θ和俯仰角γ
c
,在静止状态下物品的倾角横滚角θ
c
和俯仰角γ
c
的计算采用式(1)和式(2)计算,g
px
是x方向的加速度值,g
py
和g
pz
是y方向和z方向的加速度值,单位是重力加速度。
[0043]
θ
c
=arcsin(g
px
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0044][0045]
以上方式使用三轴加速度传感器检测行李物体的倾角,只能在静态条件下有效。由于行李物体在移动时候自身的振动导致产生较高频率的误差,从而使得预测倾角振荡较大。为了解决这个问题实施例在加速度数值变化比较剧烈时选择计算设置2测量计算物品倾角,即读取在一个定时时基信号下,以固定时间间隔δt读取陀螺仪数据ax,ay,az,陀螺仪数据读取到后,对陀螺仪数据进行积分,如(3)所示,积分计算采用离散化数值积分的方法实现,式中θ
c
和γ
c
是初始倾角值,初始化倾角使用三轴加速度传感器按照式(1)和(2)计算得到。
[0046][0047][0048]
根据三轴加速度传感器和陀螺仪传感器的特性,本专利实施例采用了以下式(4)和(5)所示的方法计算物品倾角,当加速度变换值
△
g
p
大于设定的运动阈值g
t
,系统使用陀螺仪数据计算物品的瞬时倾角θ
g
,当
△
g
p
小于设定的运动阈值g
t
,系统使用三轴加速度传感器数据计算物品稳态倾角θ
c
,g
t
是确定静止还是运动的门限值,实施例可以根据灵敏度要求设置g
t
值,正常条件设置成0.1g重力加速度。
[0049][0050][0051]
实施例计算出来这两个分量θ和γ后,在计算设置1下可使用(6)将三轴磁力传感器测得的数据m
r
转换成大地坐标系下三轴磁力传感器数据m
g
。
[0052][0053]
行李物品的方位角使用公式(2)计算:
[0054][0055]
实施例从机终端在主机终端的传输请求命令下,向主机终端输出方位角数据,主机终端在获得方位角数据后,综合rssi参数计算的距离值,可以预测行李物品的所处的空间方位。以上计算过程的具体程序实施过程如图7所示。
[0056]
实施例报警输出采用图8所示的方法,实施例使用主机终端和行李物品从机终端之间的移动速度变化量dv,振动加速度幅度av和空间距离ddis三个指标判断行李物品的安全状态程度。当行李物品的位置发生变动时,主机请求从机发送振动加速度数值av,振动加
速度幅度av采用三轴加速度的合加速度作为指标,如式(8)所示,其中ax,ay,az分别是三轴加速度传感器的三轴加速度数据:
[0057][0058]
移动速度变化量dv的计算方法是,采用rssi和方位角计算空间距离变化量,即移动速度v。然后根据前后时刻的速度v2和v1,计算速度变化量dv
[0059]
dv=v2‑
v1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0060]
空间距离ddis的计算采用上面提高的空间方位角和rssi数值代表的径向距离rs计算得到。
[0061]
ddis=rs*sinψ
[0062]
移动速度变化量dv,振动加速度幅度av和空间距离ddis所处的物理空间不同,单位和范围各不相同,因此在实施例中使用式(10)进行标准化,x是输入实际物理量,x
max
和x
min
是实际物理量的上下限,x0是实际物理量的平均值。
[0063][0064]
系统报警输出的决策方法使用径向基rbf神经网络输出,神经网络的输出编码如表2所示,行李物品的警报状态程度分成九个等级,等级零为正常状态,等级1
‑
8为不同程度的异常状态,每种异常状态对应一种蜂鸣器的输出频率和占空比,越严重的状态输出的音频频率越高,功率越大。和本实施例的技术实现模式类似的报警输出方法也在保护范围内。
[0065]
表2:系统装置报警设置与和rssi值之间的关系
[0066]
报警严重程度输出编码输出频率占空比零级00000000无输出无输出1级0000000150020%2级00000010100030%3级00000100200050%4级00001000400075%5级00010000800050%6级00100000800060%7级01000000800075%8级10000000800090%
[0067]
符号说明:本专利使用的英文缩写:lora:远距离无线电(long range radio)rssi:接收信号强度指示(received signal strength indication)。
[0068]
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。