技术特征:
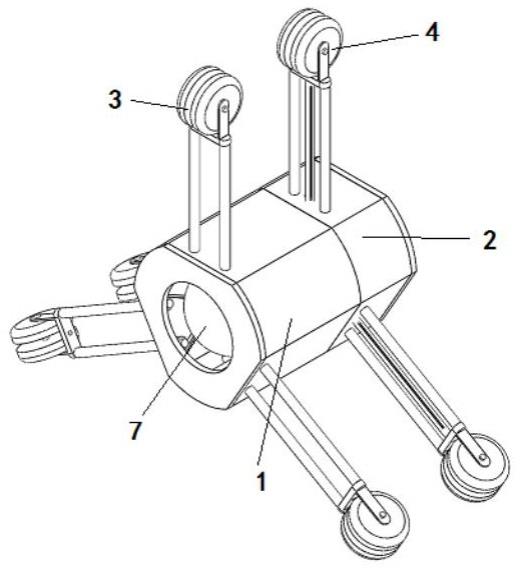
1.一种地下管网用无线管道机器人,其特征在于:包括前壳体(1),前壳体(1)后侧连接有后壳体(2),前壳体(1)外周前侧沿圆周方向均布有三组移动前轮结构(3),后壳体(2)外周沿圆周方向均布有三组驱动后轮结构(4),前壳体(1)、后壳体(2)内共同安装有与移动前轮结构(3)、驱动后轮结构(4)相连接的径向伸缩驱动结构(5),后壳体(2)内安装有与驱动后轮结构(4)相配合的移动驱动机构(6),前壳体(1)内安装有前伸缩安装机构(8),前伸缩安装机构(8)上安装有检测摄像装置(7);所述前壳体(1)前侧中心处开有用于检测摄像装置(7)穿出的穿槽(101),前壳体(1)、后壳体(2)均为水平分布的棱柱状壳体,前壳体(1)内壁边缘均布有沿前壳体(1)轴向分布的固定板(11),固定板(11)靠近后壳体(2)的一侧固定安装有伸缩气缸(12),伸缩气缸(12)沿前壳体(1)轴向分布,伸缩气缸(12)活动端滑动穿过前壳体(1)后端与后壳体(2)前端固定连接;所述移动前轮结构(3)包括前安装板(31),前安装板(31)外侧垂直设有两个对称分布的前夹持板(311),前夹持板(311)上转动连接有前辊轴(32),前辊轴(32)上安装有前滚轮(33),前安装板(31)内侧垂直固定有两个对称分布的前螺纹支撑杆(34);所述驱动后轮结构(4)包括后安装板(41),后安装板(41)外侧垂直设有两个对称分布的后夹持板(411),后夹持板(411)上转动连接有后辊轴(42),后辊轴(42)侧壁两侧连接有两个对称分布的后滚轮(43),后辊轴(42)侧壁中心处连接有第一锥齿轮(44),第一锥齿轮(44)内侧啮合连接有第二锥齿轮(45),第二锥齿轮(45)远离第一锥齿轮(44)的一侧连接有驱动轴(46),驱动轴(46)与后安装板(41)转动连接,驱动轴(46)内端穿过后安装板(41)并设有导向限位凸起(461),后夹持板(411)内侧垂直固定有两个对称分布的后螺纹支撑杆(47);所述径向伸缩驱动结构(5)包括轴向伸缩连接结构(51),轴向伸缩连接结构(51)上连接有驱动机构(52),轴向伸缩连接结构(51)前后两端分别连接有前传动机构(53)、后传动机构(54),前传动机构(53)、后传动机构(54)分别位于前壳体(1)、后壳体(2)内部。2.根据权利要求1所述的地下管网用无线管道机器人,其特征在于:所述轴向伸缩连接结构(51)包括位于前壳体(1)内部的转动横管(51),转动横管(51)后侧滑动连接有转动横杆(512),转动横管(51)前端与前传动机构(53)固定连接,转动横管(51)后端外壁与前壳体(1)后端转动连接,转动横杆(512)后端滑动穿过后壳体(2)前端与后传动机构(54)固定连接。3.根据权利要求2所述的地下管网用无线管道机器人,其特征在于:所述转动横管(51)内壁沿圆周方向均布有沿转动横管(51)轴向分布的连接导向槽(5111),转动横杆(512)外壁沿圆周方向均布有与连接导向槽(5111)滑动配合的导向横条(5121)。4.根据权利要求2所述的地下管网用无线管道机器人,其特征在于:所述驱动机构(52)包括与转动横管(51)外壁固定连接有的第三锥齿轮(521),第三锥齿轮(521)下侧啮合连接有第四锥齿轮(522),第三锥齿轮(521)中心处下端连接有第一电机(523)。5.根据权利要求2所述的地下管网用无线管道机器人,其特征在于:所述前传动机构(53)包括与转动横管(51)前端固定连接的前中心锥齿轮(531),前中心锥齿轮(531)外周沿圆周方向均布有三组前锥齿轮(532),前锥齿轮(532)中心处连接有前传动杆(533),前传动杆(533)远离前锥齿轮(532)的一端与前壳体(1)侧壁转动连接,前传动杆(533)远离前锥齿
轮(532)的一端侧壁连接有前第一同步带轮(534),前第一同步带轮(534)通过前同步带(535)连接有两个对称分布的前第二同步带轮(536),前第二同步带轮(536)中心处连接有前内螺纹支撑管(537),前内螺纹支撑管(537)与前壳体(1)侧壁转动连接,前内螺纹支撑管(537)外端穿过前壳体(1)侧壁与前螺纹支撑杆(34)螺纹连接。6.根据权利要求2所述的地下管网用无线管道机器人,其特征在于:所述后传动机构(54)包括与转动横杆(512)后端固定连接的后中心锥齿轮(541),后中心锥齿轮(541)外周沿圆周方向均布有三组后锥齿轮(542),后锥齿轮(542)中心处连接有后传动杆(543),后传动杆(543)远离后锥齿轮(542)的一端与后壳体(2)侧壁转动连接,后传动杆(543)远离后锥齿轮(542)的一端侧壁连接有后第一同步带轮(544),后第一同步带轮(544)上通过后同步带(545)连接有两个对称分布的后第二同步带轮(546),后第二同步带轮(546)中心处连接有后内螺纹支撑管(547),后内螺纹支撑管(547)后壳体(2)侧壁转动连接,后内螺纹支撑管(547)外端穿过后壳体(2)侧壁与后螺纹支撑杆(47)螺纹连接。7.根据权利要求2所述的地下管网用无线管道机器人,其特征在于:所述所述移动驱动机构(6)包括驱动中心锥齿轮(61),驱动中心锥齿轮(61)中心处与转动横杆(512)侧壁滑动连接,驱动中心锥齿轮(61)外周沿圆周方向等距离啮合连接有三组驱动锥齿轮(62),驱动锥齿轮(62)中心处连接有驱动传动杆(63),驱动传动杆(63)远离驱动锥齿轮(62)的一端与后壳体(2)侧壁转动连接,驱动传动杆(63)远离驱动锥齿轮(62)的一端侧壁连接有第一直齿轮(64),第一直齿轮(64)一侧啮合连接有第二直齿轮(65),第二直齿轮(65)中心处连接有驱动连接管(66),驱动连接管(66)与后壳体(2)侧壁转动连接,驱动连接管(66)上端穿过后壳体(2)侧壁与驱动轴(46)滑动连接,驱动连接管(66)侧壁开有沿驱动连接管(66)轴向分布的伸缩导向槽(661),导向限位凸起(461)与伸缩导向槽(661)滑动连接,驱动中心锥齿轮(61)侧壁一处啮合连接有主动锥齿轮(67),主动锥齿轮(67)中心处连接有主动轴(68),主动轴(68)远离主动轴(68)的一端连接有第二电机(69)。8.根据权利要求1所述的地下管网用无线管道机器人,其特征在于:所述前伸缩安装机构(8)包括伸缩机构(82),伸缩机构(82)上螺纹连接有与前壳体(1)同轴心设置的安装圆板(81),检测摄像装置(7)安装在安装圆板(81)前侧,伸缩机构(82)包括中心直齿轮(821),中心直齿轮(821)中心处与转动横管(51)滑动连接,中心直齿轮(821)外周啮合连接有传动直齿轮(822),传动直齿轮(822)中心处固定连接有螺纹横杆(823),螺纹横杆(823)后端与固定板(11)前侧转动连接,安装圆板(81)外周沿圆周方向均布有三组伸缩连接板(811),螺纹横杆(823)侧壁与伸缩连接板(811)螺纹连接,螺纹横杆(823)前端穿过伸缩连接板(811)与前壳体(1)前侧转动连接,中心直齿轮(821)侧壁一处连接有主动直齿轮(824),主动直齿轮(824)中心处连接有第三电机(825)。
技术总结
本发明公开了一种地下管网用无线管道机器人,包括前壳体,前壳体后侧连接有后壳体,前壳体外周均布有三组移动前轮结构,后壳体外周均布有三组驱动后轮结构,前壳体、后壳体内共同安装有径向伸缩驱动结构,后壳体内安装有与驱动后轮结构相配合的移动驱动机构,前壳体内安装有前伸缩安装机构,前伸缩安装机构上安装有检测摄像装置。在本发明中,通过径向伸缩驱动结构能够使得前滚轮、后滚轮同时沿径向进行伸缩,且在前伸缩安装机构、伸缩气缸的作用下,检测摄像装置、后壳体均可沿轴向进行伸缩,从而在投放或不使用时,可将本发明体积调节至最小状态,便于投放、携带、收藏,且本发明可以适用于不同管径的地下管道,从而扩大了本发明的适用性。适用性。适用性。
技术研发人员:刘洋 钟芷芸 陈析 徐猛
受保护的技术使用者:广州市锐凌智能科技有限公司
技术研发日:2021.09.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。