技术特征:
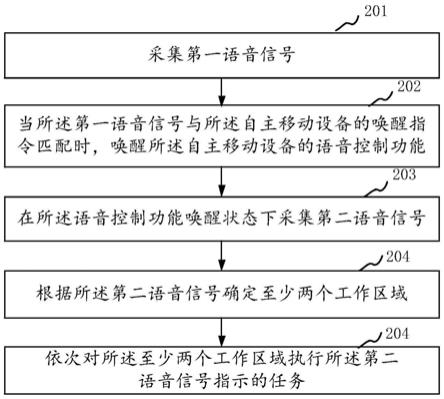
1.一种自主移动设备语音控制方法,其特征在于,应用于自主移动设备,所述方法包括:采集第一语音信号;当所述第一语音信号与所述自主移动设备的唤醒指令匹配时,唤醒所述自主移动设备的语音控制功能;在所述语音控制功能唤醒状态下采集第二语音信号;根据所述第二语音信号确定至少两个工作区域;依次对所述至少两个工作区域执行所述第二语音信号指示的任务。2.根据权利要求1所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务,包括:确定所述第二语音信号中所述至少两个工作区域中各工作区域出现的先后顺序;根据所述先后顺序依次对所述至少两个工作区域执行所述第二语音信号指示的任务。3.根据权利要求1所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务,包括:确定所述自主移动设备与所述至少两个工作区域中各工作区域之间的距离;按照距离由近至远的顺序对所述至少两个工作区域排序得到队列;根据所述队列依次对所述至少两个工作区域执行所述第二语音信号指示的任务。4.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务,包括:对所述至少两个工作区域中的一个工作区域执行完任务后,行进至下一个工作区域之前,停止执行任务。5.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述根据所述第二语音信号确定至少两个工作区域,包括:根据所述第二语音信号确定区域类别;根据所述区域类别从环境地图对应的区域集合中确定出所述至少两个工作区域。6.根据权利要求5所述的方法,其特征在于,所述根据所述区域类别从环境地图中确定所述至少两个工作区域,包括:当所述区域类别指示目标物体时,以所述目标物体为中心,从所述环境地图中确定出包含所述目标物体的区域以得到所述至少两个工作区域。7.根据权利要求5所述的方法,其特征在于,所述根据所述第二语音信号确定至少两个工作区域之前,还包括:根据所述环境地图、所述环境地图中物体的位置信息或所述环境地图中门的位置信息,将所述环境地图划分为多个工作区域以得到所述区域集合;更新所述区域集合中各工作区域的标识;向语音识别服务器发送更新信息,以使得所述语音识别服务器更新各工作区域的标识。8.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述在所述语音控制功能唤醒状态下采集第二语音信号,包括:当所述第一语音信号与所述自主移动设备的唤醒指令匹配时,控制所述自主移动设备
从第一工作状态切换为第二工作状态,所述自主移动设备在所述第二工作状态下产生的声音的音量小于在所述第一工作状态下产生的声音的音量,所述唤醒指令用于唤醒所述自主移动设备的语音控制功能;在所述第二工作状态下采集所述第二语音信号。9.根据权利要求8所述的方法,其特征在于,还包括:当所述第一语音信号与所述自主移动设备的唤醒指令匹配时,确定所述第一语音信号的声源位置;根据所述声源位置控制所述自主移动设备从第一位姿切换为第二位姿,所述自主移动设备处于所述第二位姿时麦克风与所述声源位置的距离,小于所述自主移动设备处于所述第一位姿时麦克风与所述声源位置的距离,所述麦克风是设置在所述自主移动设备上的麦克风。10.根据权利要求9所述的方法,其特征在于,所述根据所述声源位置控制所述自主移动设备从第一位姿切换为第二位姿,包括:根据所述声源位置确定旋转角度,所述旋转角度用于指示所述自主移动设备从所述第一位姿切换为第二位姿时需要旋转的角度;将所述旋转角度划分为第一角度和第二角度;在所述第一角度内以第一速度旋转,在所述第二角度内以第二速度旋转,所述第一速度大于所述第二速度。11.根据权利要求9所述的方法,其特征在于,所述当所述第一语音信号与自主移动设备的唤醒指令匹配时,根据所述声源位置控制所述自主移动设备从第一工作状态切换为第二工作状态之后,还包括:经过预设时长后控制所述语音控制功能进入等待唤醒状态。12.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务之前,还包括:确定所述自主移动设备的自身状态是否满足执行任务的要求;若所述自身状态不满足执行任务的要求,则维护所述自主移动设备。13.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述根据所述第二语音信号确定至少两个工作区域,包括:当所述第二语音信号指示任务禁区时,从环境地图中确定出所述任务禁区,从所述任务禁区以外的区域中确定出所述至少两个工作区域。14.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述根据所述第二语音信号确定至少两个工作区域,包括:根据所述第二语音信号确定区域类别;采集图像;从所述图像中确定出所述区域类别对应的区域以得到所述至少两个工作区域。15.根据权利要求14所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务,包括:根据所述区域类别确定作业方式;根据所述作业方式依次对所述至少两个工作区域执行任务。
16.根据权利要求1
‑
3任一项所述的方法,其特征在于,所述依次对所述至少两个工作区域执行所述第二语音信号指示的任务之后,还包括:确定是否对初始区域执行完任务,所述初始区域是所述自主移动设备采集所述第二语音信号时所处的区域;若未对所述初始区域执行完任务,则返回所述初始区域执行任务。17.一种自主移动设备语音控制装置,其特征在于,包括:采集模块,用于采集第一语音信号;处理模块,用于当所述第一语音信号与所述自主移动设备的唤醒指令匹配时,唤醒所述自主移动设备的语音控制功能;所述采集模块,还用于在所述语音控制功能唤醒状态下采集第二语音信号;所述处理模块,还用于根据所述第二语音信号确定至少两个工作区域;执行模块,用于依次对所述至少两个工作区域执行所述第二语音信号指示的任务。18.一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时使得所述电子设备实现如权利要求1至16任一所述的方法。19.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至16任一所述的方法。
技术总结
本申请公开了一种自主移动设备语音控制方法、装置、设备及可读存储介质,自主移动设备采集到第二语音信号后,根据第二语音信号确定至少两个工作区域,并依次对各工作区域执行第二语音信号指示的任务。采用该种方案,通过一条语音信号就能够向自主移动设备指示多个工作区域,用户通过自然语言与自主移动设备交互以使得对自主移动设备的极简控制,精确度高、过程简单。过程简单。过程简单。
技术研发人员:陈茂勇 丁民权 刘阳 林兴宝 岳鹏飞 于昊田 高超 李大亮
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:2021.08.17
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。