技术特征:
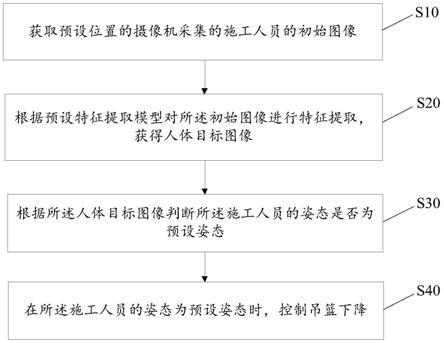
1.一种保障施工人员安全的方法,其特征在于,所述保障施工人员安全的方法包括以下步骤:获取预设位置的摄像机采集的施工人员的初始图像;根据预设特征提取模型对所述初始图像进行特征提取,获得人体目标图像;根据所述人体目标图像判断所述施工人员的姿态是否为预设姿态;在所述施工人员的姿态为预设姿态时,控制吊篮下降。2.如权利要求1所述的保障施工人员安全的方法,其特征在于,所述根据所述人体目标图像判断所述施工人员的姿态是否为预设姿态的步骤,包括:通过openpose网络模型对所述人体目标图像进行骨骼提取,获得人体骨骼信息;根据预设分类模型和所述人体骨骼信息判断所述施工人员的姿态是否为预设姿态。3.如权利要求2所述的保障施工人员安全的方法,其特征在于,所述根据预设分类模型和所述人体骨骼信息判断所述施工人员的姿态是否为预设姿态的步骤,包括:根据预设分类模型对所述人体骨骼信息进行分类,获得分类结果;对所述分类结果进行组合特征提取,获得所述施工人员的状态特征;获取所述状态特征对应的状态特征权重;根据所述状态特征和所述状态特征权重确定工人姿态,并判断所述施工人员的姿态是否为预设姿态。4.如权利要求1所述的保障施工人员安全的方法,其特征在于,所述根据预设特征提取模型对所述初始图像进行特征提取,获得人体目标图像的步骤,包括:通过预设特征提取模型中的空洞卷积层对所述初始图像进行初步特征提取,获得初步提取结果;根据所述预设特征提取模型对所述初始图像进行加强特征提取,获得加强特征提取结果;根据所述初步提取结果和所述加强特征提取结果确定人体目标图像。5.如权利要求1所述的保障施工人员安全的方法,其特征在于,所述在所述施工人员的姿态为预设姿态时,控制吊篮下降的步骤,包括:在判定所述施工人员的姿态为预设姿态时,启动预设警报器并发送控制指令至卷场机,以使所述卷场机收到所述控制指令时驱动卷筒卷动吊绳直至吊篮下降至预设安全位置。6.如权利要求1
‑
5任一项所述的保障施工人员安全的方法,其特征在于,所述获取预设位置的摄像机采集的施工人员的初始图像的步骤之后,还包括:获取当前环境中的风速;在所述风速达到预设风速阈值时,控制报警器报警,并点亮报警灯;控制吊篮下降至预设安全位置。7.如权利要求1
‑
6任一项所述的保障施工人员安全的方法,其特征在于,所述获取当前环境中的风速的步骤之前,还包括:获取布置在吊篮预设位置的叶轮的相关参数,所述相关参数包括风速、气流流经叶轮的总压降、气流体积流量、叶轮机械转化效率和叶轮轴的扭矩;根据所述相关参数通过以下公式计算风速:
n=d
p
*q*e
ta
/t其中,n为风速,d
p
是气流流经叶轮的总压降,q是气流体积流量,e
ta
是叶轮机械转化效率,t是叶轮轴的扭矩。8.一种保障施工人员安全的装置,其特征在于,所述保障施工人员安全的装置包括:获取模块,用于获取预设位置的摄像机采集的施工人员的初始图像;特征提取模块,用于根据预设特征提取模型对所述初始图像进行特征提取,获得人体目标图像;判断模块,用于根据所述人体目标图像判断所述施工人员的姿态是否为预设姿态;控制模块,用于在所述施工人员的姿态为预设姿态时,控制吊篮下降。9.一种保障施工人员安全的设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的保障施工人员安全的程序,所述保障施工人员安全的程序配置为实现如权利要求1至7中任一项所述的保障施工人员安全的方法的步骤。10.一种存储介质,其特征在于,所述存储介质上存储有保障施工人员安全的程序,所述保障施工人员安全的程序被处理器执行时实现如权利要求1至7任一项所述的保障施工人员安全的方法的步骤。
技术总结
本发明公开了一种保障施工人员安全的方法、装置、设备及存储介质。该方法包括:获取预设位置的摄像机采集的施工人员的初始图像;根据预设特征提取模型对所述初始图像进行特征提取,获得人体目标图像;根据所述人体目标图像判断所述施工人员的姿态是否为预设姿态;在所述施工人员的姿态为预设姿态时,控制吊篮下降。由于本发明是通过提取施工人员的初始图像,根据初始图像判断施工人员的姿态,进而控制吊篮,相对于现有的只能通过用户手动控制吊篮的方式,本发明上述方式能够在施工人员的姿态为预设姿态时,控制吊篮下降,保障施工人员的安全。的安全。的安全。
技术研发人员:王中任 夏攀 刘海生 李宁
受保护的技术使用者:湖北文理学院
技术研发日:2021.08.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。