技术特征:
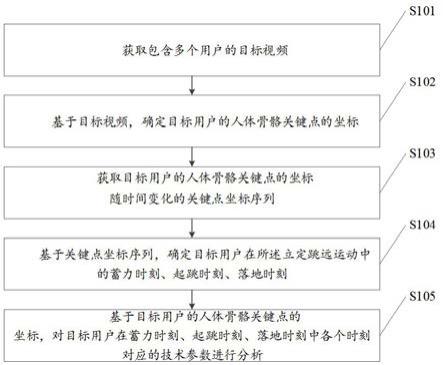
1.一种对立定跳远的技术性进行分析的方法,其特征在于,包括:获取包含多个用户的目标视频;基于所述目标视频,确定目标用户的人体骨骼关键点的坐标,所述目标用户为进行立定跳远的用户;获取所述目标用户的人体骨骼关键点的坐标随时间变化的关键点坐标序列;基于所述关键点坐标序列,确定所述目标用户在所述立定跳远运动中的蓄力时刻、起跳时刻、落地时刻;基于所述目标用户的人体骨骼关键点的坐标,对所述目标用户在蓄力时刻、起跳时刻、落地时刻中各个时刻对应的技术参数进行分析。2.如权利要求1所述的方法,其特征在于,所述基于所述目标视频,确定目标用户的人体骨骼关键点的坐标之前,还包括:采集n组历史用户进行立定跳远的视频样本,所述视频样本中包括各个历史用户的人体骨骼关键点的坐标,n为正整数;利用所述n组历史用户进行立定跳远的视频样本对神经网络模型进行训练,获得人体骨骼关键点坐标确定模型。3.如权利要求2所述的方法,其特征在于,所述基于所述目标视频,确定目标用户的人体骨骼关键点的坐标,包括:将所述目标视频输入所述人体骨骼关键点坐标确定模型中,得到所述目标用户的人体骨骼关键点的坐标。4.如权利要求1~3中任一权项所述的方法,其特征在于,所述人体骨骼关键点包括:眼睛、鼻子、肩、腰以及各个肢体关节结点。5.如权利要求1所述的方法,其特征在于,所述获取所述目标用户的人体骨骼点的坐标随时间变化的关键点坐标序列之后,还包括:判断所述关键点坐标序列中是否存在缺失的关键点;若是,对所述缺失的关键点进行补全处理。6.如权利要求1所述的方法,其特征在于,所述基于所述关键点坐标序列,确定所述目标用户在所述立定跳远运动中的蓄力时刻、起跳时刻、落地时刻,包括:基于所述关键点坐标序列,确定所述目标用户的重心位置;获取所述重心位置随时间变化的重心坐标序列;基于所述重心坐标序列和所述关键点坐标序列,确定所述目标用户在所述立定跳远运动中的蓄力时刻、起跳时刻、落地时刻。7.如权利要求6所述的方法,其特征在于,所述基于所述重心坐标序列和所述关键点坐标序列,确定所述目标用户在所述立定跳远运动中的蓄力时刻、起跳时刻、落地时刻,包括:基于所述重心坐标序列,获取所述目标用户的重心位置最高以及前后的三个时刻,包括:重心位置最高所对应的第一时刻、所述第一时刻之前的重心位置最低所对应的第二时刻以及所述第一时刻之后的重心位置最低所对应的第三时刻;基于所述关键点坐标序列,在所述第二时刻到所述第一时刻的过程中,将所述目标用户的大腿与小腿的夹角最大的时刻,确定为所述起跳时刻;基于所述关键点坐标序列,在所述第一时刻到所述第三时刻的过程中,将所述目标用
户的大腿与小腿的夹角最大的时刻,确定为所述落地时刻;在所述起跳时刻之前,基于所述关键点坐标序列,获取所述目标用户的手臂与身体的时钟角;将所述时钟角小于预设角度时的最后一个峰值时刻,确定为所述蓄力时刻。8.一种对立定跳远的技术性进行分析的装置,其特征在于,包括:第一获取模块,用于获取多用户进行立定跳远的目标视频;第一确定模块,用于基于所述目标视频,确定目标用户的人体骨骼关键点的坐标;第二获取模块,用于获取所述目标用户的人体骨骼点的坐标随时间变化的关键点坐标序列;第二确定模块,用于基于所述关键点坐标序列,确定所述目标用户在所述立定跳远运动中的蓄力时刻、起跳时刻、落地时刻;分析模块,用于基于所述目标用户的人体骨骼关键点的坐标,对所述目标用户在蓄力时刻、起跳时刻、落地时刻中各个时刻对应的技术参数进行分析。
技术总结
本发明涉及视频分析技术领域,尤其涉及一种对立定跳远的技术性进行分析的方法及装置,该方法包括:获取多用户进行立定跳远的目标视频;基于该目标视频,确定目标用户的人体骨骼关键点的坐标;获取目标用户的人体骨骼点位置随时间变化的关键点坐标序列;基于关键点坐标序列,确定目标用户在立定跳远运动中的蓄力时刻、起跳时刻、落地时刻;基于该目标用户的人体骨骼关键点的坐标,对目标用户在蓄力时刻、起跳时刻、落地时刻中各个时刻对应的技术参数进行分析,进而借助计算机程序,科学地提高运动员的成绩。员的成绩。员的成绩。
技术研发人员:陈林 马鹏翔 陈柳 黄武
受保护的技术使用者:成都怡康科技有限公司
技术研发日:2021.11.18
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。