一种基于智能云台imu的数据补偿方法
技术领域
1.本发明涉及传感器数据补偿技术领域,具体地,涉及一种基于智能云台imu的数据补偿方法。
背景技术:
2.惯性测量单元(inertial measurement unit,imu)是用于测量物体三轴姿态角以及加速度的装置;传感器在采集数据的过程中,承载传感器的智能云台受振动等环境因素影响,容易产生角度、位移等偏差,导致传感器采集的数据发生误差、畸变等问题。因此需要对传感器采集的数据进行矫正与补偿,现有的矫正补偿技术主要有以下几种:
3.第一种,对摄像头传感器采集的数据进行矫正与补偿,基于imu实现稳像技术与补偿:具体地,将imu与摄像头传感器之间建立时间同步模型,确定相对位姿,建立二者之间的映射,imu获取实时的角度数据或者运动速度加速度数据,构建起瞬时的补偿变换矩阵,针对摄像头传感器的原始数据进行相乘,得到矫正后的数据。
4.第二种,对激光雷达传感器采集的数据进行矫正与补偿,基于imu实现激光点云的畸变补偿:具体地,将imu与激光雷达之间建立同步模型,确定相应的转化矩阵,根据实时的imu角速度与位置坐标数据,计算补偿变换矩阵,与激光雷达数据相乘后得到矫正数据。
5.第三种,对毫米波雷达传感器采集的数据进行矫正与补偿,基于imu实现毫米波雷达的补偿:具体地,将imu与毫米波雷达之间建立同步模型,确定相应的转化矩阵,根据实时的imu角速度与位置坐标数据,计算补偿变换矩阵,与毫米波雷达数据相乘后得到矫正数据。
6.然而,现有传感器数据使用imu进行补偿时,由于imu本身存在随机误差,会随着时间的推移累加误差,使用前需要对imu与传感器参数都进行标定,并且imu每一瞬时得到的补偿变换矩阵都不相同,维度较高,对计算性能要求较大。另外,现有技术只能针对一个传感器进行数据补偿,没有将摄像机、激光雷达、毫米波雷达三者结合一起并行进行补偿。并且,现有的数据补偿技术主要应用于车载感知设备中,而路侧感知传感器所处的工作状况则有所不同,缺乏相应的补偿技术。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的在于提供一种可提高传感器采集的数据精度与准确度、并可同时对多种传感器采集的数据进行实时补偿的基于智能云台imu的数据补偿方法。
8.为解决上述问题,本发明的技术方案为:
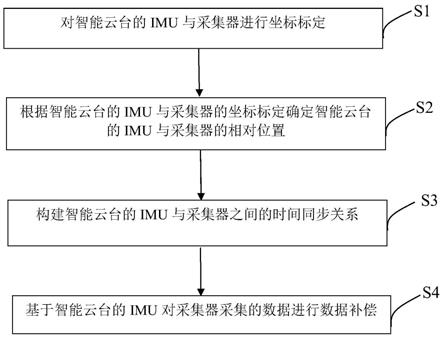
9.一种基于智能云台imu的数据补偿方法,所述方法包括以下步骤:
10.对智能云台的imu与采集器进行坐标标定;
11.根据智能云台的imu与采集器的坐标标定确定智能云台的imu与采集器的相对位置;
12.构建智能云台的imu与采集器之间的时间同步关系;以及
13.基于智能云台的imu对采集器采集的数据进行数据补偿。
14.可选地,所述采集器包括摄像机、激光雷达与毫米波雷达。
15.可选地,,所述对智能云台的imu与采集器进行坐标标定的步骤具体包括:对于摄像机,成像平面的二维点坐标为m
b
=[u v]
t
,对应空间中三维点坐标为m
b
=[x y z],对应的投影关系为sm=hm,其中s为任意数,h为对应的转化矩阵,通过使用棋盘标定方法或二维码标定方法计算求出h,进而求出对应的内外参数。
[0016]
可选地,所述根据智能云台的imu与采集器的坐标标定确定智能云台的imu与采集器的相对位置的步骤具体包括:对于摄像机,将同一姿态下采集获得的imu参数数据与摄像机的内外参数数据作为其坐标数据,计算获得二者对应的变换矩阵,使用最小二乘法最小化目标函数,求出最优的补偿变换矩阵。
[0017]
可选地,所述根据智能云台的imu与采集器的坐标标定确定智能云台的imu与采集器的相对位置的步骤具体包括:对于激光雷达和毫米波雷达,建立对应的速度与加速度之间的补偿变换矩阵,从而确定采集数据时刻下,激光雷达与毫米波雷达的坐标与初始时刻下坐标点的位置关系。
[0018]
可选地,所述构建智能云台的imu与采集器之间的时间同步关系的步骤具体包括:对于摄像机,智能云台的imu与摄像机之间具有不同的采样频率,取二者之间的最小公倍数作为输出的采样频率,使用线性插值的方法,将智能云台的imu与采集器都扩展到同一采集频率上,实现采集数据的同步。
[0019]
可选地,所述构建智能云台的imu与采集器之间的时间同步关系的步骤具体包括:智能云台的imu与激光雷达或毫米波雷达之间时间同步的过程为:根据智能云台的imu与激光雷达或毫米波雷达之间内置的时间戳,计算激光雷达或毫米波雷达每次采集数据的时间戳与其相邻的最近的imu采集数据时间戳之差,如果差值小于阈值,则视为同步数据输出,如果差值过大,就丢弃此次数据,将下一帧采样数据作为输入进行上述过程。
[0020]
可选地,所述基于智能云台的imu对采集器采集的数据进行数据补偿的步骤具体包括:对于摄像机,将每一帧的原始采样数据与获得的补偿变换矩阵相乘,即可得到输出的矫正数据,连续输出从而得到稳像的图像。
[0021]
可选地,所述基于智能云台的imu对采集器采集的数据进行数据补偿的步骤具体包括:对于激光雷达与毫米波雷达,根据速度与加速度获得的补偿变换矩阵,与原始的数据点坐标相乘,即可得到矫正之后的数据点坐标。
[0022]
与现有技术相比,本发明基于智能云台的imu姿态数据对路侧传感器数据进行实时补偿,从而提高路侧传感器采集数据的精度与准确度,并且本发明通过智能云台的imu可同时对摄像机、激光雷达与毫米波雷达等多种传感器的采集的数据进行补偿与数据融合处理。
[0023]
另外,本发明在路侧这一工作环境下实现对采集器的即时补偿,从而能够满足智能网联设备对于姿态稳定性与数据即时性的需求。
附图说明
[0024]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、
目的和优点将会变得更明显:
[0025]
图1为本发明实施例提供的基于智能云台imu的数据补偿方法流程框图。
具体实施方式
[0026]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0027]
具体地,图1为本发明实施例提供的基于智能云台imu的数据补偿方法流程框图,如图1所示,本发明提供一种基于智能云台imu的数据补偿方法,所述方法包括以下步骤:
[0028]
s1:对智能云台的imu与采集器进行坐标标定;
[0029]
具体地,在本实施例中,所述采集器包括摄像机、激光雷达传感器与毫米波雷达传感器,其中,对于摄像机,成像平面的二维点坐标为m
b
=[u v]
t
,对应空间中三维点坐标为m
b
=[x y z],默认相机为小孔成像的相机模型,对应的投影关系为sm=hm,s为任意数,h为对应的转化矩阵,通过使用棋盘标定方法或二维码标定方法计算求出h,进而求出对应的内外参数。
[0030]
对于激光雷达传感器与毫米波雷达传感器,采集的数据直接为点的距离与速度,因此并无内外参数。
[0031]
s2:根据智能云台的imu与采集器的坐标标定确定智能云台的imu与采集器的相对位置;
[0032]
具体地,对于摄像机,将同一姿态下采集获得的imu参数数据{imu
i
}与摄像机的内外参数数据{cam
i
}作为其坐标数据,计算获得二者对应的变换矩阵r:cam=r*imu t。使用最小二乘法最小化目标函数即可求出最优的补偿变换矩阵r。
[0033]
激光雷达和毫米波雷达的标定方式与相机相类似,区别在于除了坐标点以外,还需要建立对应的速度与加速度之间的补偿变换矩阵,从而确定采集数据时刻下,激光雷达与毫米波雷达的坐标与初始时刻下坐标点的位置关系。
[0034]
s3:构建智能云台的imu与采集器之间的时间同步关系;
[0035]
具体地,对于摄像机,智能云台的imu与摄像机之间具有不同的采样频率,取二者之间的最小公倍数作为输出的采样频率,使用线性插值的方法,将智能云台的imu与采集器都扩展到同一采集频率上,实现采集数据的同步。
[0036]
智能云台的imu与激光雷达或毫米波雷达之间时间同步的过程为:根据智能云台的imu与激光雷达或毫米波雷达之间内置的时间戳,计算激光雷达或毫米波雷达每次采集数据的时间戳与其相邻的最近的imu采集数据时间戳之差,如果差值小于阈值,则视为同步数据输出,如果差值过大,就丢弃此次数据,将下一帧采样数据作为输入进行上述过程。
[0037]
s4:基于智能云台的imu对采集器采集的数据进行数据补偿。
[0038]
具体地,对于摄像机,将每一帧的原始采样数据与获得的补偿变换矩阵相乘,即可得到输出的矫正数据,连续输出从而得到稳像的图像。
[0039]
对于激光雷达与毫米波雷达,根据速度与加速度获得的补偿变换矩阵,与原始的
数据点坐标相乘,即可得到矫正之后的数据点坐标。
[0040]
与现有技术相比,本发明基于智能云台的imu姿态数据对路侧传感器数据进行实时补偿,从而提高路侧传感器采集数据的精度与准确度,并且本发明通过智能云台的imu可同时对摄像机、激光雷达与毫米波雷达等多种传感器的采集的数据进行补偿与数据融合处理。
[0041]
另外,本发明在路侧这一工作环境下实现对采集器的即时补偿,从而能够满足智能网联设备对于姿态稳定性与数据即时性的需求。
[0042]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。