1.本发明属于机械设备故障诊断技术领域,特别涉及一种基于多传感器信息融合的机械故障智能诊断方法。
背景技术:
2.建立可靠、准确的机械设备故障诊断系统,对保证动力机械装备安全运行至关重要。为了实现全面监测,对于机械装备的运行监测往往会部署多个传感器。同时,随着传感技术和大数据技术的发展,对机械的监测产生了海量的监测数据,为机械故障诊断智能化奠定了基础。
3.现有智能诊断通常只利用一个传感器信号作为输入,一旦输入被噪声污染或由于通讯问题产生数据丢包等,将对诊断结果产生极大的不确定性。目前少量的利用多源信息融合的模型,仅对多源信息特征进行简单拼接,没有充分利用多源信息之间的冗余性和互补性,导致模型鲁棒性不强。
技术实现要素:
4.为了解决现有智能故障诊断多源信息利用不强、鲁棒性较弱的问题,本发明的目的在于提供一种基于多传感器信息融合的机械故障智能诊断方法,利用并行且独立的变分自编码器网络模块对各传感信息进行特征提取,提出一种基于混合高斯分布采样的融合新方法,实现对多源信息的融合,并能够充分利用多源信息之间的冗余性来提高模型的鲁棒性。
5.为了实现上述目的,本发明采用的技术方案是:
6.一种基于多传感器信息融合的机械故障智能诊断方法,包括如下步骤:
7.步骤1:利用多个传感器对机械设备进行振动监测,建立机械各运行状态下的监测信号数据库,并划分为训练集、验证集和测试集;
8.步骤2:依据多源信息即传感器的数量,建立相应数量的并行且独立的变分自编码器网络,分别以各个传感器数据作为每一个变分自编码器的输入,得到各个传感器数据的特征分布;
9.步骤3:对步骤2中得到的各个传感器数据的特征分布进行融合,形成混合高斯分布,对混合高斯分布进行采样,获取融合后的特征;
10.步骤4:利用全连接网络构建分类器,以步骤3获取的融合后特征作为输入,以各机械状态概率作为输出;
11.步骤5:以多源信息数据库的传感信息和机械状态信息作为输入,利用分类监督学习和变分自编码器的无监督学习,对上述变分自编码器网络和全连接网络进行联合训练,实现各类故障特征提取和概率预测;
12.步骤6:使用步骤5中训练完成的神经网络模型进行机械故障智能诊断。
13.所述步骤2,多源信息为k个,表示为{x
(1)
,x
(2)
,
…
,x
(k)
,
…
,x
(k)
},并行且独立的k个
变分自编码器为x
(k)
表示第k个多源信息,f
(k)
为第k个编码器网络,g
(k)
为第k个解码器网络;f
(k)
的输出为其中,μ
(k)
,σ
(k)
为表征第k个传感器信号特征高斯分布的均值和方差,π
(k)
为第k个传感器信号后续融合权值向量,均为n维向量;模型整体表示为:
[0014][0015]
z
(k)
=μ
(k)
σ
(k)
ε
[0016][0017]
其中,k=1,
…
k,为第k个信号特征的多元高斯分布,z
(k)
为第k个隐变量,ε为辅助变量,从标准正态分布中采样获得,为第k个重构信号。
[0018]
所述步骤3,对各个传感器数据的特征分布进行融合,获得表征融合特征分布的混合高斯分布,即
[0019][0020]
其中,p(r
n
|x
(1)
,x
(2)
,
…
,x
(k)
)为融合后特征的概率分布;表示第k个传感器信号后续融合权值向量第n个分量,为表征第k个传感器信号特征高斯分布的均值和方差的第n个分量,为的第n维分量,r
n
为融合后的特征向量r的第n个元素;
[0021]
对混合高斯分布进行采样,获得融合后的特征向量,其采样方式为,设第n个权重向量γ
n
符合多项式分布,分布概率为对其进行采样,得
[0022][0023]
表示采样权重向量γ
n
的第k个分量;
[0024]
其中,根据多项式分布采样性质,中只有一个元素值为1,其余为0;则
[0025][0026]
融合后的特征向量为r=[r1,r2,
…
,r
n
,
…
,r
n
]。
[0027]
所述步骤5,分类监督学习的训练损失函数为交叉熵损失函数:
[0028]
[0029]
其中,l1为交叉熵损失函数,为全连接神经网络权值矩阵的第y列,w
ct
为全连接神经网络权值矩阵的第c列,c为分类任务的类别数量,y为样本的真实故障类别编号;
[0030]
变分自编码器的无监督损失函数为
[0031][0032]
其中,l2为无监督损失函数,α和β为损失函数权重,负责调节相对数值大小;
[0033]
利用上述两部分损失函数,对变分自编码器网络和全连接网络进行联合训练,则整个模型的损失函数为
[0034]
l=l1 l2[0035]
本发明采用随机梯度下降方法,对整个模型参数进行优化。
[0036]
本发明针对机械装备故障诊断任务,利用并行且独立的变分自编码器网络模块提取多源信息特征,并利用基于混合高斯分布采样的融合方法对多源信息进行特征层融合,鲁棒性强,可以准确、可靠的完成机械装备智能诊断
[0037]
与现有技术相比,本发明的有益效果是:
[0038]
(1)利用并行且独立的变分自编码器网络,具有较强的可扩展性,可扩展至任意数量的传感器输入;且利用无监督学习各个传感器数据,使模型可以自动提取不同传感器数据的特征。
[0039]
(2)本发明无需额外专家知识,利用神经网络的强大的学习能力,自动学习多传感器信息之间的冗余性,实现多传感器特征之间的深度融合,提高了模型的鲁棒性。
附图说明
[0040]
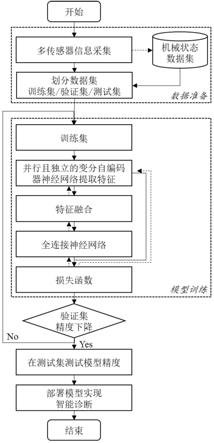
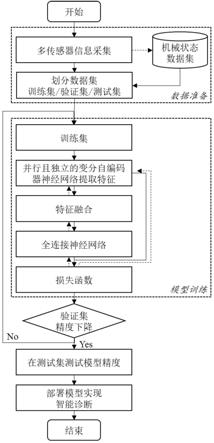
图1为一种基于多传感器信息融合的机械故障智能诊断方法流程图。
[0041]
图2为特征提取及特征融合的示意图。。
具体实施方式
[0042]
下面结合附图和实施例详细说明本发明的实施方式。
[0043]
本发明一种基于多传感器信息融合的机械故障智能诊断方法,首先利用多个传感器对机械装备进行振动监测,采集不同传感器信息作为后续模型的训练输入,所用的传感器可以为振动传感器、加速度传感器等,利用得到的传感器数据建立机械各运行状态下的监测信号数据库,并依据网络训练的一般规则,划分为训练集、验证集和测试集。依据信息源数量,建立相应数量的并行且独立的变分自编码器网络,对多源信息的特征进行提取,分别以各个传感器数据作为每一个变分自编码器的输入,得到各个传感器数据的特征分布。对多源信息的特征分布进行融合,形成混合高斯分布,通过对混合高斯分布采样实现不同信息之间特征的深度融合,获取融合后的特征。再利用全连接网络构建分类器,以融合后特征作为输入,以各机械状态概率作为输出,实现机械状态分类。以多源信息数据库的传感信息和机械状态信息作为输入,利用分类监督学习和变分自编码器的无监督学习,对上述变分自编码器网络和全连接网络进行联合训练,实现各类故障特征提取和概率预测。模型目标函数为分类损失函数和变分自编码器无监督损失函数之和,利用随机梯度下降进行模型
参数优化。经过实验验证,本发明可利用多源信息,提高了智能诊断在数据丢失等情况下的鲁棒性。
[0044]
以对某轴承进行智能故障诊断为例,该智能诊断方法具体训练、测试流程如图1所示,包括以下步骤:
[0045]
步骤1:利用故障注入分别对轴承外圈、轴承内圈、滚珠进行故障注入,利用2个三轴加速度传感器对一组轴承进行振动监测;建立机械各运行状态下的监测信号数据库,并划分为训练集、验证集和测试集;
[0046]
步骤2:针对2个三轴加速度传感器测得的6个通道的加速度数据,建立6个的并行且独立的变分自编码器网络,分别以各个传感器数据作为每一个变分自编码器的输入;多源信息输入为{x
(1)
,x
(2)
,
…
,x
(6)
},并行且独立的6个变分自编码器为f
(k)
为编码器网络,g
(k)
为解码器网络;f
(k)
的输出为其中,μ
(k)
,σ
(k)
为表征第k个传感器信号特征高斯分布的均值和方差,π
(k)
为第k个传感器信号后续融合权值,均为n维向量;模型整体可表示为:
[0047][0048]
z
(k)
=μ
(k)
σ
(k)
ε k=1,
…6[0049][0050]
其中,为第k个信号特征的多元高斯分布,z
(k)
为第k个隐变量,ε为辅助变量,从标准正太分布中采样获得,为第k个重构信号。
[0051]
步骤3:参考图2,利用步骤2中得到的各个传感器数据的特征分布,对其进行融合形成混合高斯分布,获得表征融合特征分布的混合高斯分布,即
[0052][0053]
其中,表示第k个传感器信号后续融合权值向量第n个分量,为表征第k个传感器信号特征高斯分布的均值和方差的第n个分量,为的第n维分量,r
n
为融合后的特征向量r的第n个元素。
[0054]
对混合高斯分布进行采样,获得融合后的特征向量,其采样方式为,设第n个权重变量γ
n
符合多项式分布,分布概率为对其进行采样,可得
[0055][0056]
其中,根据多项式分布采样性质,中只有一个元素值为1,其余为0;则:
[0057][0058]
其中,r
n
为融合特征向量的第n个元素,则融合后的特征向量共有128维,即融合后的特征向量r=[r1,r2,
…
,r
128
]。
[0059]
步骤4:利用全连接网络构建分类器,以步骤3获取的融合后特征作为输入,以各机械状态概率作为输出;
[0060]
步骤5:以多源信息数据库的传感信息和机械状态信息作为输入,利用分类监督学习和变分自编码器的无监督学习,对上述网络进行联合训练,实现各类故障特征提取和概率预测;
[0061]
其中,分类监督训练损失函数为交叉熵损失函数:
[0062][0063]
其中,l1为交叉熵损失函数,为全连接神经网络权值矩阵的第y列,w
ct
为全连接神经网络权值矩阵的第c列,c为分类任务的类别数量,y为样本的真实故障类别编号。
[0064]
变分自编码器的无监督损失函数为
[0065][0066]
其中,l2为无监督损失函数,α和β为损失函数权重,取值分别为1和0.01。
[0067]
利用上述两部分损失函数,对整个模型进行联合训练,则整个模型的损失函数为
[0068]
l=l1 l2[0069]
本发明采用随机梯度下降方法,对整个模型参数进行优化。
[0070]
步骤6:使用步骤5中训练完成的神经网络模型进行测试集的测试,获得故障预测准确率如表1所示;对比基于特征拼接融合方式的智能故障诊断模型,所提出的模型具有更高的测试准确率。
[0071]
表1
[0072]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。