技术特征:
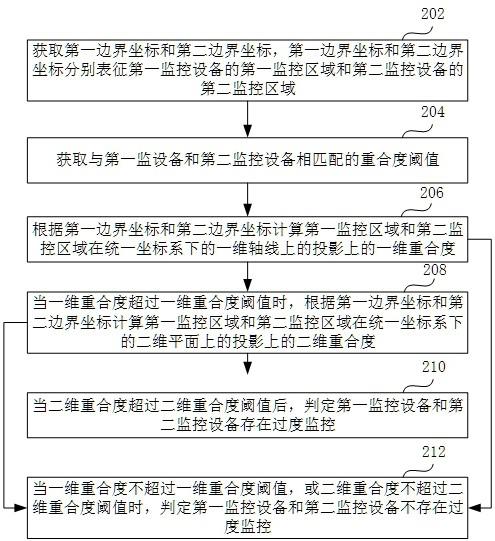
1.一种基于重合度的监控设备调整方法,其特征在于,包括:获取第一边界坐标和第二边界坐标,所述第一边界坐标和所述第二边界坐标分别表征第一监控设备的第一监控区域和第二监控设备的第二监控区域;获取与所述第一监控设备和所述第二监控设备相匹配的重合度阈值,所述重合度阈值包括一维重合度阈值、二维重合度阈值;根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在统一坐标系下的一维轴线上的投影上的一维重合度;当所述一维重合度超过所述一维重合度阈值时,根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在所述统一坐标系下的二维平面上的投影上的二维重合度;当所述二维重合度超过所述二维重合度阈值后,判定所述第一监控设备和所述第二监控设备存在过度监控;当所述一维重合度不超过所述一维重合度阈值,或所述二维重合度不超过所述二维重合度阈值时,判定所述第一监控设备和所述第二监控设备不存在过度监控。2.根据权利要求1所述的方法,其特征在于,所述第一边界坐标包括所述第一监控设备在水平面上形成的梯形投影边界点的坐标;在所述获取第一边界坐标和第二边界坐标之前,还包括:获取所述第一监控设备的第一监控参数信息,所述第一监控参数信息包括第一水平视场角α1、第一垂直视场角β1、第一安装角度θ1、第一安装高度h1;根据所述第一水平视场角α1、第一垂直视场角β1、第一安装角度θ1、第一安装高度h1计算出所述梯形投影debc的边界点坐标:、、、。3.根据权利要求1所述的方法,其特征在于,所述根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在所述统一坐标系下的二维平面上的投影上的二维重合度,包括:根据预设的投影面积计算函数f
s
(p
i
)计算出第一监控设备在二维平面上的第一投影面积s1和第二监控设备的第二投影面积s2;根据预设的重合面积计算函数f
c
(p
i
)计算出第一投影和第二投影之间的投影重合面积s
12
;根据预设的二维重合度计算函数f2(s1,s2,s
12
)计算出所述二维重合度,所述p
i
表示第i监控设备的边界坐标。4.根据权利要求1所述的方法,其特征在于,在所述获取第一边界坐标和第二边界坐标之前,还包括:获取所述第一监控设备的第一地理信息、第一监控参数和所述第二监控设备的第二地理信息、第二监控参数;
根据所述第一地理信息建立第一监控坐标系,将所述第一监控坐标系作为所述统一坐标系;根据所述第二地理信息建立第二监控坐标系;根据所述第二监控参数计算所述第二监控设备在第二监控坐标系下的第二监控边界坐标;将所述第二监控边界坐标转换成在所述统一坐标系下的所述第二边界坐标。5.根据权利要求1所述的方法,其特征在于,在所述获取第一边界坐标和第二边界坐标之前,还包括:获取预设的监控参数关系表,所述监控参数关系表中存储有所述第一监控设备的监控属性与第一监控参数的对应关系;从所述监控参数表中选取与等级最高的所述监控属性所匹配的第一监控参数;根据所选取的第一监控参数计算出所述第一边界坐标。6.根据权利要求1所述的方法,其特征在于,所述重合度阈值包括三维重合度阈值;在所述判定所述第一监控设备和所述第二监控设备存在过度监控之前,还包括:当所述二维重合度超过所述二维重合度阈值时,根据所述第一边界坐标信息和所述第二边界坐标信息计算所述第一监控区域和所述第二监控区域在所述统一坐标系下的三维空间上的三维重合度;当所述三维重合度超过所述三维重合度阈值时,则判定所述第一监控设备和所述第二监控设备存在过度监控。7.根据权利要求1所述的方法,其特征在于,所述重合度包括第一重合度和第二重合度,所述第一重合度用于表征所述第一监控设备和所述第二监控设备之间的监控区域的重合区域与所述第一监控区域的第一占比,所述第二重合度用于表征所述第一监控设备和所述第二监控设备之间的监控区域的重合区域与所述第二监控区域的第二占比;在所述判定所述第一监控设备和所述第二监控设备存在过度监控之后,包括:确定对较大的一个重合度对应的监控设备的监控区域进行调整。8.一种基于重合度的监控设备调整装置,其特征在于,包括:信息获取模块,用于获取第一边界坐标和第二边界坐标,所述第一边界坐标和所述第二边界坐标分别表征第一监控设备的第一监控区域和第二监控设备的第二监控区域;获取与所述第一监控设备和所述第二监控设备相匹配的重合度阈值,所述重合度阈值包括一维重合度阈值、二维重合度阈值;重合度计算模块,用于根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在统一坐标系下的一维轴线上的投影上的一维重合度;当所述一维重合度超过所述一维重合度阈值时,根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在所述统一坐标系下的二维平面上的投影上的二维重合度;过度监控确定模块,用于当所述二维重合度超过所述二维重合度阈值后,判定所述第一监控设备和所述第二监控设备存在过度监控;当所述一维重合度不超过所述一维重合度阈值,或所述二维重合度不超过所述二维重合度阈值时,判定所述第一监控设备和所述第二监控设备不存在过度监控。
9.一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如权利要求1至7中任一项所述的方法。10.一种计算机可读介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行如权利要求1至7中任一项所述的方法。
技术总结
本申请提供了一种基于重合度的监控设备调整方法和设备,该方法包括:获取第一边界坐标和第二边界坐标,所述第一边界坐标和所述第二边界坐标分别表征第一监控设备的第一监控区域和第二监控设备的第二监控区域;根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在统一坐标系下的一维轴线上的投影上的一维重合度;当所述一维重合度超过所述一维重合度阈值时,根据所述第一边界坐标和所述第二边界坐标计算所述第一监控区域和所述第二监控区域在所述统一坐标系下的二维平面上的投影上的二维重合度。本申请可以提高监控设备是否存在过度监控的识别效率。识别效率。识别效率。
技术研发人员:卢朝晖 张建鑫 周檑胜 徐百超 徐睿滨
受保护的技术使用者:浙江原数科技有限公司
技术研发日:2021.11.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。