一种基于uwb和lora的单基站无线定位系统
技术领域
1.本发明属于无线定位技术领域,尤其涉及一种基于uwb和lora的单基站无线定位系统。
背景技术:
2.随着无线通信技术的高速发展,基于位置信息服务的需求飞速增长。目前,卫星定位技术已提供了较好的室外定位服务。然而,在诸如大型隧道、楼房、地下车站和商场、矿井等环境中,卫星定位信号常受到严重衰减,无法提供高精度的位置信息,极大地限制了对于这类环境中的物品、车辆、人员的定位、监测、导航或者搜救能力。
3.近年来,uwb(ultra wide band)无线定位技术逐渐成为了一个新的研究热点,是一种无线载波通信技术。通过在较宽的频谱上传送极低功率的信号,能实现数百mbit/s至2 gbit/s的数据传输速率。尤其地,uwb具有功耗低、传输速率快、穿透能力强、定位精度高以及可在复杂室内环境下精确定位的优势。
4.在uwb无线定位中,常用的定位方式为多基站组网定位,需要三个及以上的定位基站才能实现精准定位,主要依托的定位算法有:基于到达时间(time of arrival,toa)以及到达时间差定位法(time difference of arrival,tdoa)等,但这在较大程度上增加了经济成本、研发难度、架设难度等。然而,uwb技术作为一种短距离通信方式,其最远通信距离只能达到几百米级别,常用的基站传输数据的方式为有线传输,需要大规模的布置线缆,将耗费大量的人力、物力、财力。
技术实现要素:
5.针对上述问题,本发明提供了一种基于uwb和lora的单基站无线定位系统。基于uwb高精度无线定位技术和lora长远距离无线数据传输技术相融合,采用aoa/pdoa或aoa/tof算法,实现了单一基站无线定位待测目标,极大地降低了定位成本,以及基站安装部署难度。特别地,融合了lora无线通信技术,将uwb定位位置信号通过lora无线自组网传输的方式,进行远距离、无线、实时、稳定的传输。最后,引入了修正的卡尔曼滤波算法,对待测目标的位置数据进行了实时的滤波处理,从而进一步地提高了定位精度。
6.本发明的一种基于uwb和lora的单基站无线定位系统,包括uwb定位标签模块、uwb探测模块、lora无线通信模块、处理终端和电源模块。
7.uwb定位标签模块置于待测目标上,用于采集待测目标的位置信息数据。
8.uwb探测模块集成于单基站上,用于接收uwb定位标签模块的位置信息数据,再利用aoa算法计算uwb信号的到达角度,以及pdoa或tof算法计算出待测目标与基站的距离,最终得到待测目标的位置坐标信息。
9.lora无线通信模块集成于单基站上,用于长远距离的无线数据传输,将uwb定位位置数据通过lora自组网无线传输到处理终端进行处理,整个自组网网络结构分为lora采集单元、lora中继单元和lora终端单元。
10.处理终端用于解析、计算、处理uwb探测模块通过lora无线通信模块发送的位置信息数据,其中,利用修正的卡尔曼滤波算法对数据进行滤波处理,实现实时滤除异常位置坐标点,提取有效数据,再利用处理后的数据进行可视化显示设置。
11.电源模块,为各模块供电。
12.进一步的,uwb探测模块设置双天线或多天线,利用双天线或多天线的细波束来区分多径信号,并选取两条能量最强的信号来获取相位信息。
13.进一步的,利用aoa算法计算uwb信号的到达角度,以及pdoa或tof算法计算出待测目标与基站的距离,具体为:两条能量最强的信号路径长度的差异p与天线1和2之间的距离d和到达角θ,三者之间的关系为;考虑一个信号波长,其中f是它的载波频率,c表示光速;那么,两信号到达相位差与p和的关系为;因此,推导出pdoa到达相位差和aoa到达角θ之间的关系为。
14.另外,根据一条信号发送与接收的相位差(即pdoa算法),计算出标签到基站的距离,即;或根据测量uwb信号在基站与标签之间往返的飞行时间t
tof
(即tof算法),计算出标签到基站的距离,即。
15.进一步的,将uwb定位位置信号通过lora无线通信模块进行无线传输。特别地,通过lora自组网通信模式,实现uwb探测模块与处理终端的长远距离数据通信,该网络结构分为lora采集单元、lora中继单元和lora终端单元。
16.lora采集单元,置于单基站上,用于接收uwb探测模块发送的待测目标位置信息。
17.lora中继单元,置于单基站上或直接单独置于lora采集单元与lora终端单元之间,用于长远距离无线数据传输。
18.lora终端单元,与处理终端相连接,用于接收中继单元传输的位置数据并上传至处理终端进行处理。
19.其中,lora模块芯片型号为asr6505,所述asr6505芯片集成了sx1262和stm8l152。
20.进一步的,处理终端用于数据的处理和可视化显示,包括:根据uwb指定的上报命令协议,提取、解析、计算有效位置信息数据;根据修正的卡尔曼滤波算法对数据进行滤波处理,实现实时滤除异常坐标点;在处理后的数据的基础上,设计开发可视化交互界面。
21.上述上报命令协议为十八字节数据的hex格式;第一字节为起始字节,固定为ascii码的“*”;第二字节为数据长度;第三字节为序号;第四、五字节为定位标签地址;第六字节为定位标签与uwb定位基站的有效位;第七至十字节为定位标签与uwb定位基站的角度信息;第十一至十四字节为定位标签与uwb定位基站的距离信息;第十五至十六字节为第三方定义数据;第十七位为校验位;第十八位为结束字节,固定为ascii码的“#”。
22.进一步的,修正的卡尔曼滤波算法为:
(1)对每5个位置信息数据求取平均值,进行平均处理。
23.(2)定义模型参数,初始化输入数据值s(k)=[z(0) 0],实际测量值d=z(0),测量时间间隔dt=0.01s,状态转移矩阵初始化,噪声耦合矩阵初始化,激励噪声w(k)对应的协方差矩阵,测量噪声对应的协方差矩阵,状态协方差矩阵,,其中q=10,r=10。
[0024]
(3)由上一时刻状态值s对下一时刻状态值s
prediction
进行预测更新,计算状态协方差矩阵。
[0025]
(4)计算卡尔曼增益,校准误差,式中z
measure
指实际测量值;测量值校正目标的最优估计,更新状态协方差矩阵,式中i为单位矩阵。
[0026]
(5)间断式采用卡尔曼滤波算法进行数据处理,以1 min为间隔,对卡尔曼滤波算法进行刷新处理,即每间隔1 min初始化与卡尔曼滤波算法相关的矩阵,从而消除因迭代次数的累计而带来的误差,有效地提高定位精度。
[0027]
进一步的,可视化交互界面包括:对定位目标位置坐标的实时显示;对定位目标进行分类管理;用户可自定义设置危险区域范围;可通过输入时间节点,查询历史轨迹。
[0028]
本发明的有益技术效果为:1.本发明采用aoa/pdoa或aoa/tof结合的定位算法,实现了单一定位基站的精准定位,极大程度地降低了基站架设难度,减小了定位经济成本,缩短了维护时间。
[0029]
2.本发明融合了uwb无线定位技术和lora自组网通信技术,定位精度高、功耗低、组网灵活、方便快捷,实现了uwb单基站精准定位和lora长远距离无线数据传输。
[0030]
3.本发明引用了卡尔曼滤波算法,并进行修正,实现了实时滤除异常点值,有效地提高了定位精度,经大量实验反复测试,定位精度保持在10 cm左右。
[0031]
4.本发明开发了功能丰富的可视化交互界面,可直观显示目标移动轨迹,并扩展了其他应用功能,如电子围栏预警、历史轨迹查询、目标分类管理等,操作简单方便,直观明了。
[0032]
5.本发明的实现,可应用于各种卫星定位信号较弱或没有的场景,如大型交通隧道中对车辆人员的定位以及危险区域管控等,应用场景广泛,社会意义重大。
附图说明
[0033]
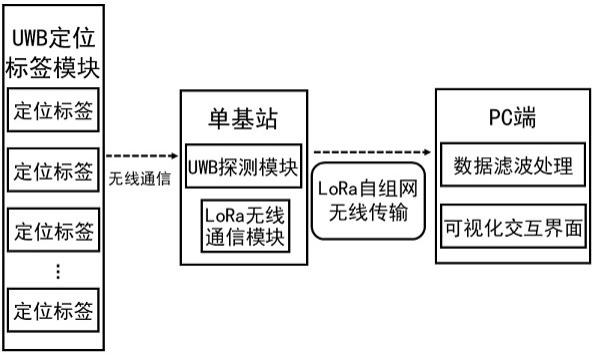
附图1为基于uwb和lora的单基站无线定位系统的结构框架图。
[0034]
附图2为aoa/pdoa算法示意图。
[0035]
附图3为常规lora自组网示意图。
[0036]
附图4为多个单基站组合组网示意图。
[0037]
附图5为本发明的可视化界面设计流程。
具体实施方式
[0038]
下面结合附图和具体实施方法对本发明做进一步详细说明。
[0039]
本发明的一种基于uwb和lora的单基站无线定位系统如图1所示,包括uwb定位标签模块、uwb探测模块、lora无线通信模块、处理终端和电源模块。
[0040]
uwb定位标签模块置于待测目标上,用于采集待测目标的位置信息数据。选择型号stm32f103c8t6芯片作为主控制器。选择型号dw1000作定位芯片。选择低剖面、高增益、抗干扰的超宽带天线作为uwb定位标签模块的通讯天线。
[0041]
uwb探测模块集成于单基站上,用于接收uwb定位标签模块的位置信息数据,再利用aoa算法计算uwb信号的到达角度,以及pdoa或tof算法计算出待测目标与基站的距离,最终得到待测目标的位置坐标信息。经大量实验反复验证,其最远识别距离为300 m(≤300 m),定位精度为10 cm左右,而且还具有抗风阻特性,符合空气动力学,即当待测目标高速运动时不易损坏。
[0042]
uwb探测模块集成了双天线或多天线,选择保持固定距离d的天线作为基站模块的通讯天线,分别命名为天线1、天线2。利用双天线的细波束来区分多径信号,并选取两条能量最强的信号。
[0043]
利用aoa算法计算uwb信号的到达角度,以及pdoa或tof算法计算出待测目标与基站的距离具体为:定位原理如图2所示,具体介绍如下:从图2中所描绘的几何形状可以看出两条能量最强的信号路径长度的差异p与天线1和2之间的距离d和到达角θ,三者之间的关系为;考虑一个信号波长,其中f是它的载波频率,c表示光速;那么,两信号到达相位差与p和的关系为;因此,推导出pdoa到达相位差和aoa到达角θ之间的关系为。
[0044]
另外,根据一条信号发送与接收的相位差(即pdoa算法),计算出标签到基站的距离,即;或根据测量uwb信号在基站与标签之间往返的飞行时间t
tof
(即tof算法),计算出标签到基站的距离,即。
[0045]
lora无线通信模块采用自组网通信模式,该自组网网络结构主要为lora采集单元、lora中继单元和lora终端单元。针对uwb单基站定位,本发明提出了两种组网方式:第一种是常规的组网方式,如图3所示。将lora采集单元,置于单基站上,用于接收uwb探测模块发送的待测目标位置信息。n个lora中继单元,直接单独置于lora采集单元与lora终端单元之间,用于长远距离无线数据传输。lora终端单元,与处理终端相连接,用于
接收lora中继单元传输的位置数据并上传至处理终端处理。
[0046]
第二种是多个单基站进行组网,如图4所示。将lora采集单元,置于单基站上,用于接收uwb探测模块发送的待测目标位置信息。接着,将n个置于单基站上的lora采集单元用作lora中继单元,即单个基站与单个基站之间进行组网传输通信,单基站上的lora模块既作为lora采集单元又作为lora中继单元,有效地实现了长远距离的无线数据传输,极大地减小了数据传输成本和架设难度。lora终端单元,与处理终端相连接,用于接收中继单元传输的位置数据并上传至处理终端处理。
[0047]
由于uwb技术为短距离通信,其最远通信距离只能达到几百米级别,常用的基站传输数据的方式为有线传输,但这需要大规模的布置线缆,将耗费大量的人力、物力、财力,而lora无线通信技术,是一种兼具长远距离和低功耗特点的技术。因此,本发明融合了uwb单基站精准定位技术和lora无线通信技术,将uwb定位位置信号通过lora无线自组网传输的方式,进行了远距离、无线、实时、稳定的传输。
[0048]
lora模块选择芯片型号asr6505,是一款基于sx1262的lora终端模组,集成了lora射频芯片sx1262和主控芯片stm8l152。为体现集成化,将采集单元的lora模块与定位基站模块集成于一体,实现了一款uwb lora的单基站模块。
[0049]
处理终端用于解析、计算、处理uwb探测模块通过lora无线通信模块发送的位置信息数据,其中,利用修正的卡尔曼滤波算法对数据进行滤波处理,实现实时滤除异常位置坐标点,提取有效数据并进行滤波处理,再利用处理后的数据进行可视化显示设置。包括:根据uwb指定的上报命令协议,提取、解析、计算有效位置信息数据;利用修正的卡尔曼滤波算法对数据进行滤波处理,实现实时滤除异常坐标点;在处理后的数据的基础上,设计开发可视化交互界面。
[0050]
上述上报命令协议为十八字节数据的hex格式;第一字节为起始字节,固定为ascii码的“*”;第二字节为数据长度;第三字节为序号;第四、五字节为定位标签地址;第六字节为定位标签与uwb定位基站的有效位;第七至十字节为定位标签与uwb定位基站的角度信息;第十一至十四字节为定位标签与uwb定位基站的距离信息;第十五至十六字节为第三方定义数据;第十七位为校验位;第十八位为结束字节,固定为ascii码的“#”。
[0051]
进一步的,修正的卡尔曼滤波算法为:(1)对每5个位置信息数据求取平均值,进行平均处理。
[0052]
(2)定义模型参数,初始化输入数据值s(k)=[z(0) 0],实际测量值d=z(0),测量时间间隔dt=0.01s,状态转移矩阵初始化,噪声耦合矩阵初始化,激励噪声w(k)对应的协方差矩阵,测量噪声对应的协方差矩阵,状态协方差矩阵,,其中q=10,r=10。
[0053]
(3)由上一时刻状态值s对下一时刻状态值s
prediction
进行预测更新,
计算状态协方差矩阵。
[0054]
(4)计算卡尔曼增益,校准误差,式中z
measure
指实际测量值;测量值校正目标的最优估计,更新状态协方差矩阵,式中i为单位矩阵。
[0055]
(5)间断式采用卡尔曼滤波算法进行数据处理,以1 min为间隔,对卡尔曼滤波算法进行刷新处理,即每间隔1 min初始化与卡尔曼滤波算法相关的矩阵,从而消除因迭代次数的累计而带来的误差,有效地提高定位精度。
[0056]
进一步的,可视化交互界面包括:对定位目标位置坐标的实时显示;对定位目标进行分类管理;用户可自定义设置危险区域范围;可通过输入时间节点,查询历史轨迹。
[0057]
可视化交互界面设计流程如图5所示,实现了实时显示定位目标轨迹,精准定位目标。并扩展了其他应用功能,如定位目标位置坐标显示、定位目标分类管理、电子围栏预警、历史轨迹查询等等。所述电子围栏预警功能,可自定义设置禁止围栏区域。若有目标进入该区域时,将触发电子围栏功能,进行语音报警提醒。所述历史轨迹查询功能,用户可通过输入时间节点信息,提取该时间段的位置信息数据,从而进行历史轨迹查询。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。