技术特征:
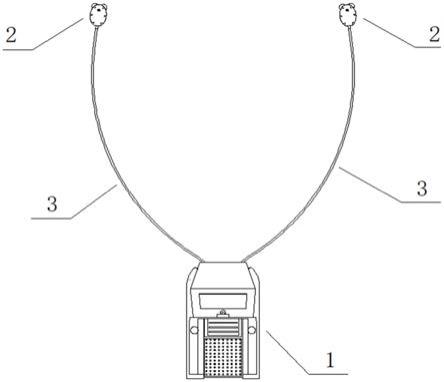
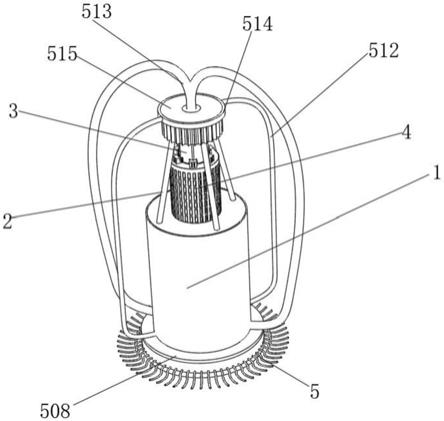
1.一种三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,包括一个主船和二个副船,二个副船通过漂浮带与主船相连。三船均具有自动驾驶功能,相互协同成倒品字型行进,同时联合漂浮带形成半包围结构清扫水面。其中,主船结合激光雷达、图像视觉、定位系统、pid控制实现自动驾驶。副船通过激光雷达实现自动驾驶。2.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,主船的自动驾驶功能:通过定位系统和目标位置规划行驶路径,再结合pid控制算法得到主船的基础前行速度和基础转向速度。通过激光雷达得到障碍物和岸边相对主船的距离和方位,从而得到主船的障碍规避的转向速度和前行速度。通过图像视觉获得副船的位置和朝向,从而得到主船为了与副船保持距离不变且朝向一致所需的前行和转向的协同补偿速度,以及副船的协同补偿速度。将基础速度、障碍规避速度和协同补偿速度进行加权累加得到主船的执行速度并实现。3.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,副船的自动驾驶功能:通过激光雷达得到岸边和障碍物相对副船的距离和方位,从而得到副船为了与岸边保持期望距离所需的沿岸行驶速度,和为了避开障碍物的沿岸行驶速度。副船将主船发送的主船基础速度和副船协同补偿速度,以及自身的沿岸行驶速度和沿岸行驶速度加权相加后作为副船的执行速度并实现。4.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,主船的自动驾驶功能具体为:主船根据定位系统给出的当前定位信息、目标点位置以及地图信息,基于视线法规划一条行驶路径。以规划路径点为目标牵引点,以其与定位系统获取的实时坐标位置的连线长度作为前向速度的反馈量,通过pid控制算法,给出主船的基础前行速度;同时以这个连线的朝向作为主船的期望前进方向,将其与定位系统获取的主船当前航向角的偏差作为反馈,通过pid控制算法,给出主船的基础转向速度。主船根据主船激光雷达的扫描信息,聚类出障碍物和河道相对主船的距离和方位,根据排斥势场方法,给出主船的障碍规避的转向速度和前行速度。主船根据获取的图像信息,采用深度神经网络,提取包含副船的边界框;在此框中,利用颜色信息提取副船的轮廓,并通过双目匹配算法确定这些轮廓的三维位置;三维位置聚合后,获得副船的位置和朝向。主船依据自身的位置朝向与副船的位置朝向的偏差,通过比例反馈,给出主船的前行和转向的协同补偿速度,以及副船的协同补偿速度,使得主船相对副船的距离保持不变且朝向一致。主船将上述的基础速度、障碍规避速度和协同补偿速度进行加权累加,作为主船的执行速度。5.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,副船的自动驾驶功能具体为:副船依据副船激光雷达的扫描信息,聚类形成河岸和障碍物信息。对沿河岸行驶的副船,根据聚类得到的副船与河岸距离,以及与期望距离的偏差,给出副船沿河岸的行驶速度。对聚类的障碍物信息,依据势场排斥法,给出副船的障碍规避速度。副船同时获取主船发送过来的主船基础速度和副船协同补偿速度。最终将上述的四个速度加权相加后作为副船的执行速度。6.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,主船包
括激光雷达、摄像头、定位系统、传送带、收集框、推进器。传送带安装在船体前部,形态为前低后高;传送带后方为漂浮物的收集框。7.如权利要求6所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,收集框与船体滑动连接。8.如权利要求1所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,副船包括激光雷达、推进器等。9.如权利要求8所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,副船还包括导水板和护栏。10.如权利要求8所述三船协同的自动驾驶无人水面漂浮物清洁船,其特征在于,副船还包括密封接插件。
技术总结
本发明公开了一种三船协同的自动驾驶无人水面漂浮物清洁船,包括一主船和二个副船,二个副船通过漂浮带与主船相连,并张开成倒品字型队形协同前进。前进中,三船加水带所形成的半包围区域内漂浮物垃圾将汇聚到主船收集口,由主船的传送带将漂浮物收集到主船的收集框内。所述主副船均具有自动驾驶功能,可准确保持倒品字型队形,不仅替代了人工,且清扫效率高;主船传送带机构将漂浮物与水分离,提高了收集容量。了收集容量。了收集容量。
技术研发人员:项基 薛峰
受保护的技术使用者:杭州华鲲云起信息技术有限公司
技术研发日:2021.09.09
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。