技术特征:
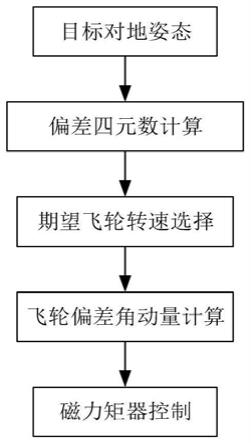
1.一种遥感卫星成像期间飞轮转速优化方法,其特征是:包括以下步骤:步骤1:建立卫星本体坐标系,包括卫星本体坐标系,轨道坐标系,期望坐标系,对日坐标系,地球惯性坐标系j2000;步骤2:建立成像任务时飞轮期望角动量;步骤3:进行成像期间的飞轮转速优化。2.根据权利要求1所述的一种遥感卫星成像期间飞轮转速优化方法,其特征是:所述步骤1具体为:建立卫星本体坐标系,卫星本体坐标系是指固连于卫星的obxbybzb直角坐标系,坐标原点ob在卫星的质心处, x轴与卫星飞行方向同向, z轴垂直于卫星对接环与运载器过渡段对接面,指向光学相机, y轴按右手法则确定,对地定向无姿态偏差时,与卫星轨道坐标系重合;建立轨道坐标系,轨道坐标系是指obxoyozo直角坐标系,其坐标原点为卫星质心ob, yo轴指向轨道角速度反方向, zo轴指向地球中心, xo轴与 yo、 zo轴成右手直角坐标系,此坐标系为对地定向基准;建立期望坐标系,期望坐标系是指obxcyczc直角坐标系,其坐标原点为卫星质心ob,为轨道坐标系绕 x轴旋转一定角度,是根据成像目标点位置形成的卫星期望对地姿态;建立对日坐标系,为了使太阳帆板对日充电,且在核心区域成像时卫星的机动角度最小,对日坐标系的设计通常是在太阳黄道坐标系基础上,绕星体某轴旋转固定角度;太阳黄道坐标系定义如下: xs轴指向太阳, zs轴指向黄北极, ys轴符合右手定则;建立地球惯性坐标系j2000,地球惯性坐标系是指oixiyizi直角坐标系,坐标系原点oi为地心,xi轴指向平春分点,zi轴指向平北极, yi轴符合右手定则,为姿态测量基准和轨道测量基准。3.根据权利要求2所述的一种遥感卫星成像期间飞轮转速优化方法,其特征是:所述步骤2具体为:为避免成像时的飞轮转速过低,且考虑机动余量,选择对地飞轮转速作为期望值;令三轴的飞轮期望转速大小均相同,作为期望转速,即4.根据权利要求3所述的一种遥感卫星成像期间飞轮转速优化方法,其特征是:所述步骤3具体为:根据对地成像任务,计算轨道系至期望姿态的四元数由星敏等姿态测量敏感器测量给出惯性系至卫星本体的四元数由导航接收机实时测量卫星的位置速度信息,通过星上转换为轨道六根数,并计算给出惯性系至轨道系四元数计算得到期望姿态至卫星本体的偏差四元数:根据角动量守恒原理,卫星常规模式下的飞轮期望角动量:
对地成像任务时飞轮期望角动量的选择方法:判断8个常规模式下的飞轮期望角动量与当前飞轮角动量矢量位置关系,找到与当前飞轮角动量矢量夹角θ
i
最小的飞轮期望角动量作为当前时刻的飞轮期望角动量,有效提高了角动量管理的效率;θ=min|θ
i
|飞轮的角动量管理通过三轴磁力矩器实现,即利用磁力矩器与磁场产生控制力矩消除飞轮角动量偏差,控制律设计为其中,k
t
为控制增益;所需磁矩的为:其中,b为磁场强度。
技术总结
本发明是一种遥感卫星成像期间飞轮转速优化方法。本发明建立卫星本体坐标系,包括卫星本体坐标系,轨道坐标系,期望坐标系,对日坐标系,地球惯性坐标系J2000;建立成像任务时飞轮期望角动量;进行成像期间的飞轮转速优化。卫星非任务期间处于常规模式,利用磁力矩器对该模式下的飞轮角动量进行管理,能够使卫星在任意时刻转为对地成像姿态时,三轴飞轮的转速在期望转速附近,避免了因飞轮转速过低引起的姿态剧烈抖动。本发明适用于有空间环境干扰的情况,且不要求常规模式下的卫星姿态恒为惯性空间稳定。空间稳定。空间稳定。
技术研发人员:韩霜雪 范林东 钟兴 戴路 刘洁冰
受保护的技术使用者:长光卫星技术有限公司
技术研发日:2021.09.15
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。