技术特征:
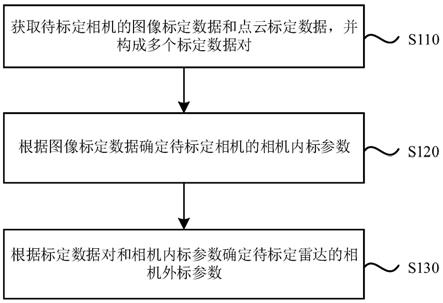
1.一种无人车相机标定方法,其特征在于,包括:获取待标定相机的图像标定数据和点云标定数据,并构成多个标定数据对,其中,所述图像标定数据和所述点云标定数据是所述无人车绕设定中心点旋转采集得到的,所述标定数据对中所述图像标定数据与所述点云标定数据是在同一时间采集的;根据所述图像标定数据确定所述待标定相机的相机内标参数,所述相机内标参数用于表征所述待标定相机的相机坐标系下相机坐标与所述待标定相机获取的图像像素坐标之间的转换关系;根据所述标定数据对和所述相机内标参数确定所述待标定雷达的相机外标参数,所述相机外标参数用于表征点云坐标与所述待标定相机的相机坐标系下相机坐标之间的转换关系。2.根据权利要求1所述的方法,其特征在于,所述获取待标定相机的图像标定数据和点云标定数据,包括:获取所述待标定相机采集的原始图像数据和所述待标定雷达采集的原始点云数据;从所述原始图像数据中筛选出包含完整标定板的图像标定数据;基于所述图像标定数据的采集时间从所述原始点云数据中筛选出所述点云标定数据。3.根据权利要求1所述的方法,其特征在于,所述根据所述标定数据对和所述相机内标参数确定所述待标定雷达的相机外标参数,包括:针对每个所述标定数据对,根据所述标定数据对中的图像标定数据和所述相机内标参数确定标定板的目标点在所述相机坐标系下的目标点相机坐标,根据所述标定数据对中的点云标定数据确定所述目标点在所述雷达坐标系下的目标点点云坐标;根据各标定数据对的所述目标点相机坐标和所述目标点点云坐标确定所述相机外标参数。4.根据权利要求3所述的方法,其特征在于,所述根据所述标定数据对中的图像标定数据和所述相机内标参数确定目标点在所述相机坐标系下的目标点相机坐标,包括:获取所述图像标定数据中标定板的角点在标定板坐标系下的角点标定板坐标,以及所述角点在图像坐标系下的角点像素坐标;根据所述角点标定板坐标、所述角点像素坐标和所述相机内标参数确定坐标变化矩阵,所述坐标变换矩阵用于表征所述标定板坐标系下标定板坐标与相机坐标之间的转换关系;获取所述目标点在标定板坐标系下的目标点标定板坐标,根据所述目标点标定板坐标以及所述坐标变换矩阵确定所述目标点相机坐标。5.根据权利要求3所述的方法,其特征在于,所述根据所述标定数据对中的点云标定数据确定所述目标点在所述雷达坐标系下的目标点点云坐标,包括:针对所述点云标定数据中每条激光射线,基于所述激光射线中点云数据点的深度得到标定板边缘点的边缘点点云坐标;基于所述边缘点点云坐标拟合出标定板的边缘直线方程,将边缘直线方程的交点坐标作为所述目标点点云坐标。6.根据权利要求3所述的方法,其特征在于,所述根据各标定数据对的所述目标点相机坐标和所述目标点点云坐标确定所述相机外标参数,包括:
采用奇异值分解算法,基于所述目标点相机坐标和所述目标点点云坐标确定所述相机外标参数。7.一种无人车相机标定装置,其特征在于,包括:标定数据获取模块,用于获取待标定相机的图像标定数据和点云标定数据,并构成多个标定数据对,其中,所述图像标定数据和所述点云标定数据是所述无人车绕设定中心点旋转采集得到的,所述标定数据对中图像标定数据与点云标定数据是在同一时间采集的;相机内标参数模块,用于根据所述图像标定数据确定所述待标定相机的相机内标参数,所述相机内标参数用于表征所述待标定相机的相机坐标系下相机坐标与所述待标定相机获取的图像像素坐标之间的转换关系;相机外标参数模块,用于根据所述标定数据对和所述相机内标参数确定所述待标定雷达的相机外标参数,所述相机外标参数用于表征点云坐标与所述待标定相机的相机坐标系下相机坐标之间的转换关系。8.一种计算机设备,其特征在于,所述设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1-6中任一所述的无人车相机标定方法。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一所述的无人车相机标定方法。10.一种无人车相机标定系统,所述系统包括转盘、至少两个标定板,以及无人车,其中:所述转盘用于固定所述无人车,并承载所述无人车绕设定中心点旋转,以使所述无人车进行数据采集;所述至少两个标定板固定于所述转盘的不同侧,以使所述无人车随所述转盘转动时获取包含所述至少两个标定板的采集数据,并根据所述采集数据进行参数标定。
技术总结
本发明实施例公开了一种无人车相机标定方法、装置、设备、存储介质及系统,所述方法包括:获取待标定相机的图像标定数据和点云标定数据,并构成多个标定数据对,其中,所述图像标定数据和所述点云标定数据是所述无人车绕设定中心点旋转采集得到的;根据所述图像标定数据确定所述待标定相机的相机内标参数;根据所述标定数据对和所述相机内标参数确定所述待标定雷达的相机外标参数,实现了一次性获取无人车相机内参及相机外参标定所需的数据;根据所述图像标定数据确定所述待标定相机的相机内标参数;根据所述标定数据对和所述相机内标参数确定所述待标定雷达的相机外标参数,简化了参数标定过程,提高了标定效率。提高了标定效率。提高了标定效率。
技术研发人员:林金表 徐卓然
受保护的技术使用者:北京京东乾石科技有限公司
技术研发日:2020.09.09
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。