技术特征:
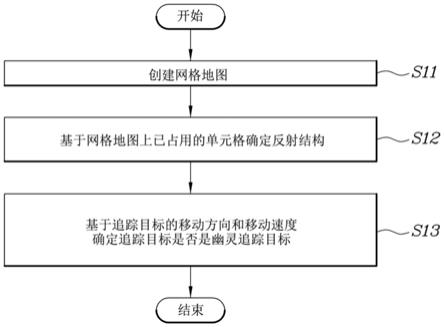
1.一种用于后方交叉碰撞警的告方法,包括:将主车辆的周围区域划分成沿横向和纵向排列的多个单元格;创建网格地图,在所述多个单元格之中,在所述网格地图上与所述主车辆周围观测到的静止物体的位置相对应的单元格被分类为已占用的单元格;基于所述网格地图上所述已占用的单元格之间的位置关系,确定反射雷达信号的反射结构的位置;以及基于所确定的反射结构的位置以及由所述雷达观测到的追踪目标的位置和所述追踪目标的移动方向中的任意一项,确定所述追踪目标是否是幽灵追踪目标。2.根据权利要求1所述的方法,其中,所述创建网格地图包括:将与所述雷达观测到的所述静止物体的点相对应的单元格分类为所述已占用的单元格。3.根据权利要求1所述的方法,其中,所述创建网格地图包括:响应于所述雷达在预定参考观测周期内观测率维持等于或高于预定的参考观测率,或响应于所述雷达接收到的信号幅度等于或大于预定阈值,将与观测到的静止物体的位置相对应的所述单元格分类为所述已占用的单元格。4.根据权利要求1所述的方法,其中,所述确定所述反射结构的所述位置包括:响应于所述网格地图的一列中所述已占用的单元格之间的距离在预定阈值距离内,确定所述已占用的单元格表示一个反射结构,并得出以下结论:在所述已占用的单元格中被确定表示一个反射结构的两个端点的单元格分别是所述一个反射结构的起始已占用的单元格和末尾已占用的单元格。5.根据权利要求1所述的方法,其中,所述确定所述追踪目标是否是所述幽灵追踪目标包括:响应于所述追踪目标向所述反射结构的位置移动,确定所述追踪目标是所述幽灵追踪目标。6.根据权利要求1所述的方法,其中,所述确定所述追踪目标是否是所述幽灵追踪目标包括:响应于所述追踪目标的横向位置比所述反射结构的横向位置更远离所述主车辆,所述追踪目标的横向位置变化的幅度指向所述主车辆的方向,并且所述追踪目标的纵向位置落在所述反射结构的起点和终点之间,确定所述追踪目标是所述幽灵追踪目标。7.根据权利要求1所述的方法,其中,所述确定所述追踪目标是否是所述幽灵追踪目标包括:响应于所述追踪目标的横向位置比所述反射结构的横向位置更远离所述主车辆,所述追踪目标的横向位置变化的幅度指向所述主车辆的方向,并且表示所述追踪目标的移动路径的直线与所述反射结构的位置交叉,确定所述追踪目标是所述幽灵追踪目标。8.根据权利要求1所述的方法,其中,所述确定所述追踪目标是否是所述幽灵追踪目标包括:响应于所述追踪目标的横向位置落在所述反射结构的所述位置和所述主车辆的位置之间,所述追踪目标的横向位置变化指向所述主车辆的方向,并且在所述追踪目标从所述反射结构的位置开始移动的条件下,以物理的方式计算得出所述追踪目标的横向加速度大于参考加速度,确定所述追踪目标是所述幽灵追踪目标。9.一种用于后方交叉碰撞警告的装置,包括:雷达,被配置为观测主车辆的周围区域的物体;和控制器,被配置为:以横向和纵向将所述主车辆周的围区域划分为多个单元格,并且创建网格地图,在所
述多个单元格之中,在所述网格地图上与所述主车辆周围观测到的静止物体的位置相对应的单元格被分类为已占用的单元格;基于所述网格地图上所述已占用的单元格之间的位置关系,确定反射所述雷达的雷达信号的反射结构的位置;以及基于所确定的反射结构的位置以及由所述雷达观测到的追踪目标的位置和所述追踪目标的移动方向中的任意一项,确定所述追踪目标是否是幽灵追踪目标。10.根据权利要求9所述的装置,其中,所述控制器包括:网格地图创建器,被配置为以横向和纵向将所述主车辆的周围区域划分为所述多个单元格,并且创建所述网格地图,在所述网格地图上与所述主车辆周围观测到的所述静止物体的所述位置相对应的所述单元格被分类为所述已占用的单元格;反射结构确定器,被配置为基于所述网格地图上所述已占用的单元格之间的位置关系,确定反射所述雷达信号的所述反射结构的位置;以及幽灵追踪目标确定器,被配置为基于所确定的所述反射结构的位置以及所述追踪目标的所述位置和所述追踪目标的所述移动方向中的任意一项,确定所述追踪目标是否是所述幽灵追踪目标。11.根据权利要求10所述的装置,其中,所述网格地图创建器还被配置为将与所述雷达观测到的所述静止物体的点相对应的单元格分类为已占用的单元格。12.根据权利要求10所述的装置,其中,所述网格地图创建器还被配置为响应于所述雷达在预定参考观测周期内观测率维持等于或高于预定的参考观测率,或响应于所述雷达接收到的信号幅度等于或大于预定阈值,将与观测到的所述静止物体的所述位置相对应的所述单元格分类为所述已占用的单元格。13.根据权利要求10所述的装置,其中,所述反射结构确定器还被配置为响应于所述网格地图的一列中已占用的单元格之间的距离在预定阈值距离内,确定所述已占用的单元格表示一个反射结构,并得出以下结论:在所述已占用的单元格中被确定表示所述一个反射结构的两个端点的单元格分别是所述一个反射结构的起始已占用的单元格和末尾已占用的单元格。14.根据权利要求10所述的装置,其中,所述幽灵追踪目标确定器还被配置为响应于所述追踪目标向所述反射结构的位置移动,确定所述追踪目标是所述幽灵追踪目标。15.根据权利要求10所述的装置,其中,所述幽灵追踪目标确定器还被配置为响应于所述追踪目标的横向位置比所述反射结构的横向位置更远离所述主车辆,所述追踪目标的横向位置变化的幅度指向所述主车辆的方向,并且所述追踪目标的纵向位置落在所述反射结构的位置的起点和终点之间,确定所述追踪目标是所述幽灵追踪目标。16.根据权利要求10所述的装置,其中,所述幽灵追踪目标确定器还被配置为响应于所述追踪目标的横向位置比所述反射结构的横向位置更远离所述主车辆,所述追踪目标的横向位置变化的幅度指向所述主车辆的方向,并且表示所述追踪目标的移动路径的直线与所述反射结构的所述位置交叉,确定所述追踪目标是所述幽灵追踪目标。17.根据权利要求10所述的装置,其中,所述幽灵追踪目标确定器还被配置为响应于所述追踪目标的横向位置落在所述反射结构的所述位置和所述主车辆的位置之间,所述追踪目标的横向位置变化指向所述主车辆的方向,并且在所述追踪目标从所述反射结构的位置
开始移动的条件下,以物理的方式计算得出所述追踪目标的横向加速度大于参考加速度,确定所述追踪目标是所述幽灵追踪目标。
技术总结
公开了一种用于后方交叉碰撞警告的方法包括:将主车辆的周围区域划分成沿横向和纵向排列的多个单元格;创建网格地图,在所述多个单元格之中,在所述网格地图上与所述主车辆周围观测到的静止物体的位置相对应的单元格被分类为已占用的单元格;基于所述网格地图上所述已占用的单元格之间的位置关系,确定反射雷达信号的反射结构的位置;以及基于所确定的反射结构的位置以及由所述雷达观测到的追踪目标的位置和所述追踪目标的移动方向中的任意一项,确定所述追踪目标是否是幽灵追踪目标。确定所述追踪目标是否是幽灵追踪目标。确定所述追踪目标是否是幽灵追踪目标。
技术研发人员:姜恩奭
受保护的技术使用者:现代摩比斯株式会社
技术研发日:2021.05.21
技术公布日:2021/11/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。