技术特征:
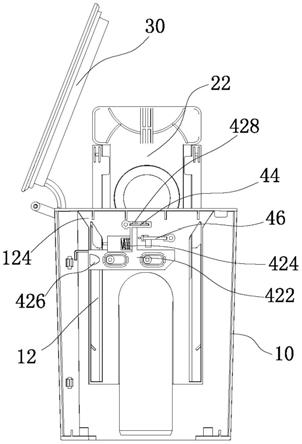
1.一种集尘装置,其特征在于,包括:壳体;尘袋组件,所述尘袋组件可拆卸地安装在所述壳体内;盖体,所述盖体用于盖合在所述壳体上;非接触式感应开关组件,安装于所述壳体上;非接触式触发件,安装于所述盖体上;控制器,电连接所述非接触式感应开关组件;当所述尘袋组件安装在所述壳体内,且所述盖体盖合在所述壳体上时,所述非接触式触发件能够随盖体移动至靠近所述非接触式感应开关组件的位置,使得所述非接触式感应开关组件产生触发信号;当所述尘袋组件与所述壳体拆卸分离,或/和所述盖体相对所述壳体打开时,所述非接触式感应开关组件未产生触发信号;所述控制器判断所述非接触式感应开关组件未产生触发信号时限制所述集尘装置启动集尘动作。2.如权利要求1所述的集尘装置,其特征在于,所述非接触式感应开关组件包括活动机构、阻隔件和非接触式感应开关,所述阻隔件和所述非接触式感应开关中一个固定连接所述活动机构,所述阻隔件和所述非接触式感应开关中另一个固定连接所述壳体,以使得所述活动机构可带动所述阻隔件和所述非接触式感应开关中一者相对所述壳体移动;当所述尘袋组件安装在所述壳体内,且所述盖体盖合在所述壳体上时,所述阻隔件处于未阻隔所述非接触式触发件和所述非接触式感应开关的位置,以允许所述非接触式感应开关组件产生触发信号;当所述尘袋组件与所述壳体拆卸分离,且所述盖体盖合在所述壳体上时,所述阻隔件处于阻隔在所述非接触式触发件和所述非接触式感应开关之间的位置,以阻止所述非接触式感应开关组件产生触发信号。3.如权利要求2所述的集尘装置,其特征在于,所述活动机构可活动地连接所述壳体,所述尘袋组件安装在所述壳体内而推动所述活动机构至第一位置,以使所述阻隔件与所述非接触式感应开关错开设置;所述尘袋组件与所述壳体拆卸分离而撤销推动以使得所述活动机构在弹性元件的作用下自动回复至第二位置,以使所述阻隔件遮挡所述非接触式感应开关。4.如权利要求3所述的集尘装置,其特征在于,所述壳体内设有插槽,所述活动机构设有受力部,当所述活动机构位于第二位置时,所述受力部至少部分伸入所述插槽内;所述尘袋组件设置有插板,所述插板可活动地插接于所述插槽内,以经所述受力部推动所述活动机构整体移动至所述第一位置。5.如权利要求4所述的集尘装置,其特征在于,所述壳体内设有第一空腔和第二空腔,以及将所述第一空腔和所述第二空腔分隔开的隔离支架,所述第一空腔用于容纳所述尘袋组件,所述第二空腔用于容纳所述非接触式感应开关组件,所述隔离支架靠近所述第一空腔一侧设有所述插槽,所述隔离支架对应所述插槽的侧壁处开设有开口,所述受力部经所述开口伸入所述插槽内。
6.如权利要求5所述的集尘装置,其特征在于,所述开口隐藏于所述插槽的内侧。7.如权利要求4所述的集尘装置,其特征在于,所述活动机构包括活动支架和弹性元件,所述活动支架可活动地连接所述壳体,所述弹性元件弹性连接所述活动支架和所述壳体,以提供所述活动支架自动回复至第二位置的弹性力,所述活动支架设有所述受力部和相对所述受力部设置的承载部,所述阻隔件或所述非接触式感应开关设置在所述承载部上。8.如权利要求7所述的集尘装置,其特征在于,所述壳体设有相对设置的两个插槽,以及位于所述两个插槽之间的定位面,所述插板与所述两个插槽插接配合时贴合所述定位面设置,所述活动支架的活动轨迹平行于所述定位面设置。9.如权利要求8所述的集尘装置,其特征在于,所述活动支架沿直线轨迹活动设置,所述活动支架的活动方向垂直所述两个插槽的长度方向设置;或者,所述活动支架转动连接所述壳体设置,所述活动支架的转动轴线垂直所述定位面设置。10.如权利要求8所述的集尘装置,其特征在于,所述插板与所述插槽插接配合时,所述插板经侧边缘抵压所述活动支架的受力部,且所述插板和所述受力部位于同一平面内。11.如权利要求4所述的集尘装置,其特征在于,所述插槽具有敞开的槽口,所述插板经所述槽口插接于所述插槽内,所述受力部具有朝向所述槽口所在一侧的受力面,所述受力面相对所述插槽的延伸方向倾斜设置,所述插板经所述受力面推动所述活动机构横向移动。12.如权利要求3所述的集尘装置,其特征在于,所述壳体设有顶表面,所述顶表面邻近所述盖体设置,所述非接触式感应开关固定连接所述壳体,并位于所述顶表面背离所述盖体一侧,所述非接触式感应开关与所述顶表面之间设置有间隔,所述阻隔件固定连接所述活动支架,当所述阻隔件随所述活动机构运动而移动至所述间隔处,所述阻隔件遮挡所述所述非接触式感应开关设置。13.如权利要求3所述的集尘装置,其特征在于,所述壳体设有顶表面,所述顶表面邻近所述盖体设置,所述阻隔件固定连接所述壳体,并位于所述顶表面背离所述盖体一侧,所述非接触式感应开关固定连接所述活动支架,当所述非接触式感应开关随所述活动机构运动而移动至所述阻隔件背离所述顶表面一侧,所述阻隔件遮挡所述非接触式感应开关设置。14.根据权利要求1至13任一项所述的集尘装置,其特征在于,所述非接触式感应开关为霍尔开关,所述非接触式触发件为磁性件。15.根据权利要求1至13任一项所述的集尘装置,其特征在于,所述盖体盖合在所述壳体上时,所述非接触式感应开关和所述非接触式触发件之间的距离为5mm~30mm。16.一种清洁机器人系统,其特征在于,包括清洁机器人和权利要求1至15任一项所述的集尘装置,所述清洁机器人可自动与所述集尘装置对接,以使所述集尘装置将所述清洁机器人的垃圾抽取至所述尘袋组件内。
技术总结
本发明涉及清洁机器人技术领域,公开了一种集尘装置及清洁机器人系统,其中,集尘装置包括壳体、尘袋组件、盖体、非接触式感应开关组件、非接触式触发件和控制器;所述尘袋组件可拆卸地安装在所述壳体内;所述盖体用于盖合在所述壳体上;非接触式感应开关组件安装于所述壳体上;非接触式触发件安装于所述盖体上;控制器电连接所述非接触式感应开关组件。本发明的集尘装置通过无接触触发的方式代替了机械触发的方式,使盖体盖合在壳体上的阻力消除,避免了灰尘等异物对盖体和壳体的影响,也减少了很多安装孔,结构更加简单、牢固,使集尘装置的整体外观性更好,能够延长集尘装置的使用寿命。命。命。
技术研发人员:钟学森 林兆庆 夏晓晓
受保护的技术使用者:深圳市银星智能科技股份有限公司
技术研发日:2021.09.30
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。