技术特征:
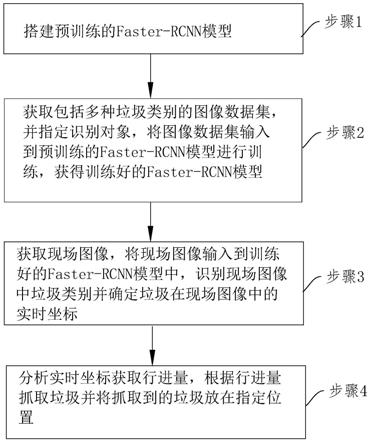
1.一种ai智能垃圾识别分类方法,其特征在于,包括以下步骤:搭建预训练的faster
‑
rcnn模型;获取包括多种垃圾类别的图像数据集,并指定识别对象,将所述图像数据集输入到所述预训练的faster
‑
rcnn模型进行训练,获得训练好的faster
‑
rcnn模型;获取现场图像,将所述现场图像输入到所述训练好的faster
‑
rcnn模型中,识别所述现场图像中垃圾类别并确定垃圾在所述现场图像中的实时坐标;分析所述实时坐标获取行进量,根据所述行进量抓取垃圾并将抓取到的垃圾放在指定位置。2.根据权利要求1所述的一种ai智能垃圾识别分类方法,其特征在于,所述搭建预训练的faster
‑
rcnn模型包括以下步骤:搭建conv layers,用于提取图片的特征图,其中所述conv layers包括conv、pooling、relu三种层;搭建区域生成网络层,使用区域生成网络层生成检测框,初步提取图片中目标候选区域;搭建区域池化层,获取并分析所述特征图和目标候选区域后提取候选特征图;搭建分类层,使用边框回归获得检测框最终精确位置,以及通过所述候选特征图判定目标类别。3.根据权利要求1所述的一种ai智能垃圾识别分类方法,其特征在于,所述预训练的faster
‑
rcnn模型进行训练的训练步骤包括:对所述图像数据集中的图片进行预处理;所述预训练的faster
‑
rcnn模型对预处理后的图片进行测试,获取测试结果;预设平均精确率ap阈值,根据所述测试结果进行评估,若评估结果低于平均精确率ap阈值,则修改所述预训练的faster
‑
rcnn模型参数,直至测试结果达到所述平均精确率ap阈值。4.根据权利要求1所述的一种ai智能垃圾识别分类方法,其特征在于,所述行进量包括x轴行进量、y轴行进量和z轴行进量,其中,所述z轴行进量为预设数值,所述x轴行进量和所述y轴行进量根据所述实时坐标计算得到。5.根据权利要求4所述的一种ai智能垃圾识别分类方法,其特征在于,所述x轴行进量和所述y轴行进量根据所述坐标计算得到的计算步骤包括:设定参考坐标点;计算所述参考坐标点和所述实时坐标的x轴偏移量和y轴偏移量;将所述x轴偏移量和所述y轴偏移量分别乘以变换因子a获得所述x轴行进量和所述y轴行进量。6.一种ai智能垃圾识别分类系统,包括机械臂子系统、传送带、图像采集单元和控制模块,所述传送带用于运输待分类的垃圾;所述图像采集单元,用于获取传送带上运输垃圾的现场图像,并将所述现场图像输入到所述控制模块;所述控制模块包括识别单元、训练单元、坐标单元和行进量单元,所述识别单元上搭建
有预训练的faster
‑
rcnn模型,用于识别垃圾类别;所述训练单元用于获取包括多种垃圾类别的图像数据集,并指定识别对象,将多种垃圾类别的图像数据集输入到所述预训练的faster
‑
rcnn模型进行训练,获得训练好的faster
‑
rcnn模型;所述坐标单元用于获取垃圾在所述现场图像中的实时坐标;所述行进量单元用于根据所述坐标确定行进量,并将所述行进量传输至所述机械臂子系统;机械臂子系统用于根据所述行进量抓取垃圾并将抓取到的垃圾放在指定位置。7.根据权利要求6所述的一种ai智能垃圾识别分类系统,其特征在于,所述控制模块还包括复位单元,所述复位单元用于当将抓取到的垃圾放在指定位置后,控制所述机械臂控制系统回到初始位置。8.根据权利要求6所述的一种ai智能垃圾识别分类系统,其特征在于,所述行进量单元包括预设子单元和计算子单元,所述预设子单元用于获取预设的z轴行进量,所述计算子单元用于根据所述实时坐标计算x轴行进量和y轴行进量。9.根据权利要求6所述的一种ai智能垃圾识别分类系统,其特征在于,所述识别单元包括:第一搭建子单元,用于搭建conv layers,用于提取图片的特征图,其中所述conv layers包括conv、pooling、relu三种层;第二搭建子单元,用于搭建区域生成网络层,使用区域生成网络层生成检测框,初步提取图片中目标候选区域;第三搭建子单元,用于搭建区域池化层,获取并分析所述特征图和目标候选区域后提取候选特征图;第四搭建子单元,搭建分类层,使用边框回归获得检测框最终精确位置,以及通过所述候选特征图判定目标类别。10.根据权利要求6所述的一种ai智能垃圾识别分类系统,其特征在于,所述训练单元包括:预处理子单元,用于对所述图像数据集中的图片进行预处理;测试子单元,用于所述预训练的faster
‑
rcnn模型对预处理后的图片进行测试,获取测试结果;评估子单元,用于预设平均精确率ap阈值,根据所述测试结果进行评估,若评估结果低于平均精确率ap阈值,则修改所述预训练的faster
‑
rcnn模型参数,直至测试结果达到所述平均精确率ap阈值。
技术总结
本申请公开了一种AI智能垃圾识别分类系统和方法,其中AI智能垃圾识别分类方法包括:通过训练Faster
技术研发人员:王艺臻
受保护的技术使用者:海南锔元科技有限公司
技术研发日:2021.05.17
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。