技术特征:
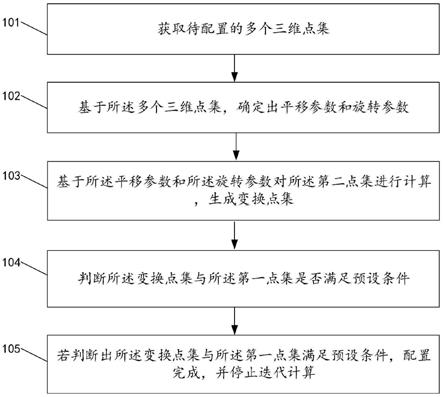
1.一种点云配准方法,其特征在于,包括:获取待配置的多个三维点集;基于所述多个三维点集,确定出平移参数和旋转参数;基于所述平移参数和所述旋转参数对所述第二点集进行计算,生成变换点集;判断所述变换点集与所述第一点集是否满足预设条件;若判断出所述变换点集与所述第一点集满足预设条件,配置完成,并停止迭代计算。2.根据权利要求1所述的方法,其特征在于,所述预设条件包括所述变换点集与所述第一点集之间的平均距离小于设定阈值。3.根据权利要求1所述的方法,其特征在于,所述多个三维点集可包括第一点集和第二点集。4.根据权利要求3所述的方法,其特征在于,还包括:若判断出所述变换点集与所述第一点集未满足预设条件,将所述变换点集作为新的第二点集,并继续执行所述计算所述第二点集中每个点在所述第一点集中对应的近点的步骤。5.根据权利要求3所述的方法,其特征在于,在所述基于所述多个三维点集,确定出平移参数和旋转参数之前,包括:计算所述第二点集中每个点在所述第一点集中对应的近点。6.根据权利要求5所述的方法,其特征在于,所述基于所述多个三维点集,确定出平移参数和旋转参数,包括:基于所述近点构建所述近点对应的点集;初始化平移参数和旋转参数,并基于所述近点对应的点集通过预设公式计算出平移参数和旋转参数。7.根据权利要求6所述的方法,其特征在于,所述基于所述近点对应的点集通过预设公式计算出平移参数和旋转参数,包括:设置所述平移参数包括dx,dy,dz,所述旋转参数包括rx,ry,rz,以及预设的缩放比例为m;通过公式:计算出平移参数和旋转参数,其中,所述{x
a
,y
a
,z
a
}表示为所述近点对应的点集中的某一点,所述{x
b
,y
b
,z
b
}表示为所述近点对应的点集中的另一点。8.一种点云配准装置,其特征在于,包括:获取模块,用于获取待配置的多个三维点集;确定模块,用于基于所述多个三维点集,确定出平移参数和旋转参数;生成模块,用于基于所述平移参数和所述旋转参数对所述第二点集进行计算,生成变
换点集;判断模块,用于判断所述变换点集与所述第一点集是否满足预设条件;处理模块,用于若判断出所述变换点集与所述第一点集满足预设条件,配置完成,并停止迭代计算。9.一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行1至7任意一项所述的点云配准方法。10.一种计算机设备,包括存储器和处理器,所述存储器用于存储包括程序指令的信息,所述处理器用于控制程序指令的执行,其特征在于:所述程序指令被处理器加载并执行时实现权利要求1至7任意一项所述的点云配准方法。
技术总结
本发明实施例提供的一种点云配准方法、装置、存储介质和计算机设备的技术方案中,获取待配置的多个三维点集;基于所述多个三维点集,确定出平移参数和旋转参数;基于所述平移参数和所述旋转参数对所述第二点集进行计算,生成变换点集;判断所述变换点集与所述第一点集是否满足预设条件;若判断出所述变换点集与所述第一点集满足预设条件,配置完成,并停止迭代计算,通过上述方式能够解决现有技术种点云配准低的问题。云配准低的问题。云配准低的问题。
技术研发人员:苏艳军 庞树鑫 徐光彩
受保护的技术使用者:中国科学院植物研究所
技术研发日:2021.08.26
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。