技术特征:
1.非连续自时延多智能体系统一致性与饱和分布式控制方法,其特征在于,步骤如下:步骤一、建立具有非连续动力学性态和混合自时延的多智能体系统并确定其一致性目标其中表示第i个智能体的状态变量;表示第i个智能体的状态变量;体现了该系统混自时延的特性;非连续向量值函数与刻画了每个孤立智能体的本质动力学性态;常数矩阵b为状态内联矩阵,半正定矩阵d1,d2表示时延配置矩阵;τ
s
表示第s个状态自时延、表示智能体i第n个状态分量;表示对的求导;提出一种广义的lipschitz条件,选取第一个智能体x1(t)为参考节点,充当一致性目标,其动力学方程为步骤二、通过传感器装置获得各节点状态信息并建立误差模型通过定义误差向量e
i
(t)=x
i
(t)
‑
x1(t),由式(1)和(2)可得多智能体误差系统:其中i=1,2,
…
,n,s=1,2,
…
,s;e
in
(t)表示误差向量e
i
(t)的第n个分量;通过定义的误差向量e
i
(t),可以将研究多智能体系统的全局指数一致性问题,转换成误差系统的指数稳定性问题,便于直接利用lyapunov稳定性定理进行系统分析;步骤三、设计具有时变控制增益的非平滑分布式控制策略智能体之间需由通信拓扑完成状态信息交互,因此需对其施加分布式策略;其中k为正值常数,sign(
·
)表示符号函数;控制配置矩阵a=[a
ij
]
n
×
n
用来实现分布式控制策略,满足耗散耦合条件,即若第i个智能体与第j个智能体之间有信息传递,i≠j,则a
ij
=a
ji
>0,否则a
ij
=a
ji
=0;时变控制强度ρ(t):[0, ∞)
→
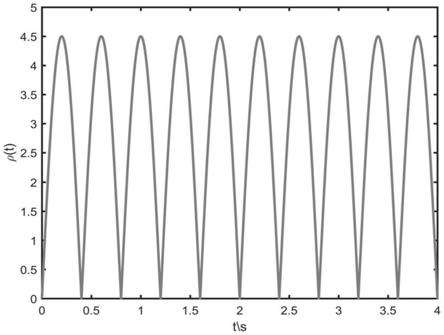
[0, ∞)有界且分段连续,其反映了系统运行过程中,智能体之间耦合强度的变化情况;且满足在任一控制域内,其控制增益的积分平均值存在下界,即:其中,t指控制域时间、m表示第m个控制域、表示任一控制域内控制增益积分平均值的下界;步骤四、利用高斯误差函数和微分中值定理模拟饱和效应
又考虑到系统实际运行环境以及控制成本,必须对控制信号加以限幅;引入饱和策略,形式如下:其中,表示控制器u
i
(t)第j个控制分量,为预设的控制器输出阈值,i=1,2,
…
,n,j=1,2,
…
,n;利用高斯误差函数来近似模拟饱和效应,从而降低控制信号的不平滑度;其中erf(
·
)表示高斯误差函数,利用微分中值定理来简化函数形式;首先定义下式:其中i=1,2,
…
,n,j=1,2,
…
,n;由于控制信号的幅值已经被限制,很容易得到是有界的,这意味着随后对函数应用微分中值定理,即存在一个常数满足下式其中线性主部线性主部线性主部表示控制器初值;从高斯误差函数的表达式得到g(0)=0,令可以将(9)式转换成下式:结合式(8)和(10),最终得到改进的饱和策略:为了便于后续推导,将式(11)转换成如下紧凑形式其中diag(
·
)表示对角矩阵;步骤五、获得多智能体系统在分布式控制策略下实现指数一致性的参数配置与最大容许时延设1:通信拓扑包含一个有向生成树,且智能体1为根节点;基于图论,若智能体1为根节点,拉普拉斯矩阵的底层拓扑可划分为:其中为常值列向量,为全零列向量,为非奇异m矩阵;则存
在一个正对对角矩阵使得成立;其中λ=diag(ξ1,ξ2,
…
,ξ
n
‑1),为了便于后续分析,记λ
min
表示矩阵的最小特征值;设2:对于非连续混合自时延多智能体系统(1),若非连续动力学函数满足设2:对于非连续混合自时延多智能体系统(1),若非连续动力学函数满足则基于filippov集值映射和测度选择定理,对于任意的的设存在正值常数m0,m1,m2,使得下列式子成立;表示filippov集值映射,α1(t)、β1(t)、α2(t
‑
τ
s
)、β2(t
‑
τ
s
)均为定义域内的可测函数,h1(t)属于函数f1(t,h1(t)的一个自变量;(t)的一个自变量;利用filippov集值映射理论,将有限个间断点映射到对应集合中,将不连续函数转化成filippov集值函数;然后利用测度选择定理挑选出可测函数以获得非连续微分方程在filippov意义下的解;又因为可测函数的不唯一性,导致出现式(13)所示,即使当h1(t)=h2(t)时,α(t)也不一定等于β1(t)的情况;基于式(13)进一步分析可以得到这意味着f1(
·
)的连续可微部分的导数将被限制在一个可变上界区间内;对于式(14),由于存在乘积效应,当h1(t)=h2(t)时,不等式可以取到等号;当τ
s
=0时,其便转换成一般的处理交叉项的形式;先推导非连续混合自时延多智能体系统(1)在非平滑分布式负反馈控制策略(4)辅之以改进的饱和策略(12)的作用下实现全局指数一致的充分条件,并估计其最大容许时延;选取如下lyapunov函数:其中i
n
表示n
×
n单位矩阵;为了便于后续的推导,基于式(15)得到如下关系式计算v(t)关于时间t的集值lie导数并根据filippov集值映射的性质得:
其中其中补偿项补偿项为集值函数;为集值函数;定义如下:显然可知存在可测函数满足显然可知存在可测函数满足由此可得基于设2,进一步得到:其中其中为矩阵d2的最大特征值;随后根据引理2,设2以及式(16)可以得到:
其中分别为矩阵和的最大特征值;为矩阵的最小特征值;根据式(18)、(19)、(20)以及(21)可得根据式(18)、(19)、(20)以及(21)可得表示矩阵d2的最大特征值;表示函数v(t q)在区间t∈[0, ∞)内的上确界,其中综上分析,可以得到在分布式策略(4)辅之以改进饱和策略(12)的作用下,多智能体系统(1)实现指数一致的充分条件与最大容许时延的估算式;对于非连续混合自时延多智能体系统(1),若各项参数满足设1与设2,在非平滑分布式负反馈控制器(4)辅之以改进的饱和策略(12)的作用下,可实现全局指数一致的条件为
最大容许时延:其中
技术总结
本发明提供了非连续自时延多智能体系统一致性与饱和分布式控制方法,属于信息技术领域。利用具有时变控制增益的分布式负反馈控制器实现智能体之间状态信息交互。又考虑到实际系统运行环境与控制成本,增设外部饱和环节来将控制信号幅值限制在一个合理的范围。然后利用高斯误差函数以及微分中值定理来近似模拟饱和效应,以此降低控制信号的不平滑度。随后应用Filippov微分包含理论和测度选择定理处理非线性动力学函数的非连续性。接着通过广义Halanay不等式和Lyapunov稳定性定理得到指数一致性判定条件与最大容许时延。最后通过数值仿真验证了本发明所提出的控制策略的有效性。仿真验证了本发明所提出的控制策略的有效性。仿真验证了本发明所提出的控制策略的有效性。
技术研发人员:汤泽 王佳枫 王艳 纪志成
受保护的技术使用者:江南大学
技术研发日:2021.08.16
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。