技术特征:
1.一种基于fpga硬件的spot
‑
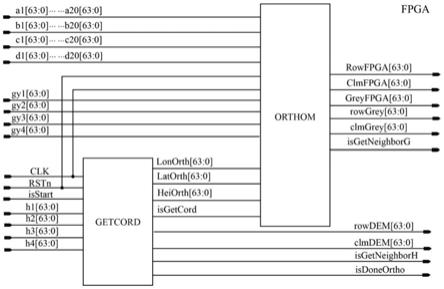
6卫星影像rfm正射纠正方法,其特征在于,包括如下步骤:1)获取正射影像像素点的大地坐标;2)利用rfm模型进行坐标转换,即将地面点的大地坐标转换为原始影像的像素行坐标和列坐标;3)进行正射影像灰度插值;4)重复步骤1)~步骤3),直至得到正射影像上所有像素点的灰度值,从而获得经过正射纠正的影像。2.根据权利要求1所述的基于fpga硬件的spot
‑
6卫星影像rfm正射纠正方法,其特征在于,步骤1)包括:设原始影像的4个顶点分别为p1、p2、p3和p4,它们对应的地面点p1、p2、p3和p4的大地坐标分别为(lon1,lat1)、(lon2,lat2)、(lon3,lat3)和(lon4,lat4),那么正射影像覆盖的地面范围根据以下公式来确定,即:在确定了正射影像的范围后,根据给定的经、纬度地面采样间距steplon和steplat来确定正射影像的行、列数量,如下公式所示:式中,n
jorth
和n
iorth
分别为正射影像的行、列数量;设正射影像上任意一个像素点p
orth
的像素坐标为(i
orth
,j
orth
),那么像素点p
orth
对应的地面点p
i
,i=1,2,3,
…
,n
jorth
×
n
iorth
,地面点p
i
的大地坐标(lon,lat)通过如下公式得到:式中,(i
lb
,j
lb
)为正射影像左下角像素点的像素坐标,即i
lb
=0,j
lb
=n
jorth
;lon为经度,lat为纬度;在得到地面点p
i
的大地坐标(lon,lat)后,根据以下公式计算地面点p
i
在dem中的行列坐标(i
d
,j
d
),即:其中,lond
min
和latd
min
分别为dem中经度和纬度的最小值;stlond和stlatd为dem的采样间距。在获取地面点p
i
在dem中的行列坐标(i
d
,j
d
)后,采用以下并行双线性插值方法计算地面点p
i
对应的高程值hei,
式中,h11和h12为中间变量;clmfdem、rowfdem为地面点p在dem中的行列坐标(i
d
,j
d
)的小数部分;h1、h2、h3、h4为四邻域像素对应的高程值;hei为最终的高程插值结果。3.根据权利要求1所述的基于fpga硬件的spot
‑
6卫星影像rfm正射纠正方法,其特征在于,步骤2)是利用如下rfm模型把地面点的大地坐标坐标lon,lat,hei转换为原始影像的像素列坐标和行坐标i
orig
,j
orig
,其中,ioff、iscale、joff和jscale为像素坐标正则化参数;多项式numl、denl、nums和dens分别由以下公式计算得到,numl=a1 a2l a3p a4h a5lp a6lh a7ph a8l2 a9p2 a
10
h2 a
11
plh a
12
l3 a
13
lp2 a
14
lh2 a
15
l2p a
16
p3 a
17
ph2 a
18
l2h a
19
p2h a
20
h3denl=b1 b2l b3p b4h b5lp b6lh b7ph b8l2 b9p2 b
10
h2 b
11
plh b
12
l3 b
13
lp2 b
14
lh2 b
15
l2p b
16
p3 b
17
ph2 b
18
l2h b
19
p2h b
20
h3nums=c1 c2l c3p c4h c5lp c6lh c7ph c8l2 c9p2 c
10
h2 c
11
plh c
12
l3 c
13
lp2 c
14
lh2 c
15
l2p c
16
p3 c
17
ph2 c
18
l2h c
19
p2h c
20
h3dens=d1 d2l d3p d4h d5lp d6lh d7ph d8l2 d9p2 d
10
h2 d
11
plh d
12
l3 d
13
lp2 d
14
lh2 d
15
l2p d
16
p3 d
17
ph2 d
18
l2h d
19
p2h d
20
h3其中,a1~a
20
、b1~b
20
,c1~c
20
,d1~d
20
为rfm模型参数;p、l和h分别为大地坐标lon、lat、和hei的正则化坐标;正则化坐标分别由以下公式计算得到,其中,lonoff、lonscale、latoff、latscale、hoff和hscale为大地坐标正则化参数。4.根据权利要求1所述的基于fpga硬件的spot
‑
6卫星影像rfm正射纠正方法,其特征在于,步骤3)是采用如下并行双线性插值方法计算原始影像的像素坐标(i
orig
,j
orig
)的灰度值greyfpga,即:式中,clmfgrey、rowfgrey分别为原始影像的像素坐标(i
orig
,j
orig
)的小数部分;gy1、gy2、gy3、gy4为原始影像的像素坐标(i
orig
,j
orig
)四邻域像素所对应的灰度值,gy11和gy12为中间变量;最后把灰度值greyfpga赋给像素坐标为(clmfpga,rowfpga)的正射影像像素点。
技术总结
一种基于FPGA硬件的SPOT
技术研发人员:张荣庭 周国清 张广运 朱强
受保护的技术使用者:南京工业大学
技术研发日:2021.08.20
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。