技术特征:
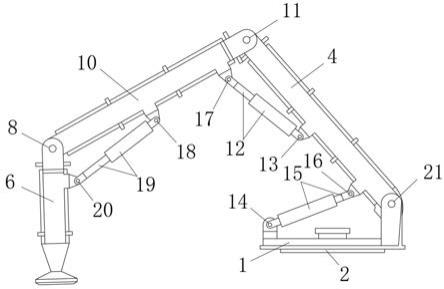
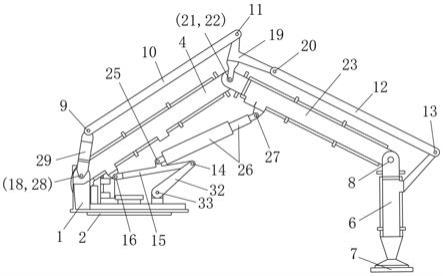
1.一种水下壁面清洗机器人三自由度清洁工作装置,包含输水管、水枪、机架、臂杆、直线驱动器,其特征在于:所述输水管为刚性管,包括第一输水管、第二输水管、第三输水管,所述臂杆包括第一臂杆、第二臂杆、第三臂杆,所述直线驱动器包含第一直线驱动器、第二直线驱动器、第三直线驱动器,所述机架、第一臂杆、第二臂杆、第三臂杆、第一直线驱动器、第二直线驱动器、第三直线驱动器构成平面三自由度连杆机构;所述第一输水管固定安装在第一臂杆上,第二输水管固定安装在第二臂杆上,第三输水管固定安装在第三臂杆上;所述第一臂杆、机架、第一直线驱动器构成第一闭环回路,所述第一臂杆、第二臂杆、第二直线驱动器组成第二闭环回路,所述第二臂杆、第三臂杆、第三直线驱动器构成第三闭环回路,第一输水管一端通过软管连通高压水路,另一端通过软管与第二输水管一端连通,第二输水管另一端通过软管与第三输水管一端连通,第三输水管另一端通过软管与水枪连通。2.根据权利要求1所述的一种水下壁面清洗机器人三自由度清洁工作装置,其特征在于:所述第一臂杆通过第一转动副安装在机架上,所述第一直线驱动器一端通过第二转动副安装在机架上,另一端通过第三转动副安装在第一臂杆上;第一直线驱动器为伺服电动缸;所述第二臂杆通过第四转动副安装在第一臂杆上,所述第二直线驱动器一端通过第五转动副安装在第一臂杆上,另一端通过第六转动副安装在第二臂杆上;所述第二直线驱动器为伺服电动缸;所述第三臂杆通过第七转动副安装在第二臂杆上,所述第三直线驱动器一端通过第八转动副安装在第二臂杆上,另一端通过第九转动副安装在第三臂杆上;所述第三直线驱动器为伺服电动缸;所述机架通过第十转动副与爬壁机器人连接。
技术总结
一种水下壁面清洗机器人三自由度清洁工作装置,包含输水管、水枪、机架、臂杆、直线驱动器,输水管为刚性管,包括第一、第二、第三输水管,所述臂杆包括第一、第二、第三臂杆;机架、臂杆、直线驱动器构成平面三自由度连杆机构;第一、第二、第三输水管分别固定安装在第一、第二、第三臂杆上;第一臂杆、机架、第一直线驱动器构成第一闭环回路,第一臂杆、第二臂杆、第二直线驱动器组成第二闭环回路,第二臂杆、第三臂杆、第三直线驱动器构成第三闭环回路;各输水管通过软管连通,第一输水管一端连通高压水路,第三输水管与水枪连通。该种壁面清洗机器人清洁工作装置可实现水枪相对机架三自由度可控运动,利用高压水流实现竖立面的清洁作业。业。业。
技术研发人员:王保平 赵凌燕 孙芹 管志光 张洪丽 张林
受保护的技术使用者:山东交通学院
技术研发日:2020.05.12
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。