1.本实用新型属于试验工装技术领域,更具体地说,特别涉及一种自动数控车床机械手试验工装。
背景技术:
2.数控车床较好地解决了复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床,数控车床机械手在进行工作的时候,需要机械手的夹持力,移动定位是否精确进行试验,便于工作时适应不同的零件加工。
3.例如申请号:cn201520293147.4中涉及一种机械手力矩试验装置,包括力矩传感器、卡涩工装、支架和顶部开设有键槽且底部与力矩传感器顶部连接的机械手适配器;所述卡涩工装包括顶部与力矩传感器的底部连接的外壳体、设置于外壳体内的旋转机构和螺栓,外壳体顶部的两侧分别开设有用于螺接螺栓的螺纹孔,螺栓的螺栓头位于外壳体内,所述旋转机构顶部两个所述螺栓的螺栓头之间设置有横向凸台,旋转机构底部可拆卸地安装于支架的底部。本实用新型连接简单方便,无需改变机械手原有的结构;且无需人员手动操作卡涩工装,避免人为因素影响,确保力矩试验的准确性。
4.基于现有技术中发现,现有的试验工装进行数控车床机械手夹持力试验的时候,需要在机械手上频繁的更换不同重量的零件,操作过程比较繁琐,工作效率比较低,且数控车床机械手进行定位移动的时候,前期的调节精度存在误差,机械手移动时容易撞击试验工装,造成试验工装的损坏。
5.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种自动数控车床机械手试验工装,以期达到更具有更加实用价值性的目的。
技术实现要素:
6.为了解决上述技术问题,本实用新型提供一种自动数控车床机械手试验工装,以解决现有的试验工装进行数控车床机械手夹持力试验的时候,需要在机械手上频繁的更换不同重量的零件,操作过程比较繁琐,工作效率比较低,且数控车床机械手进行定位移动的时候,前期的调节精度存在误差,机械手移动时容易撞击试验工装,造成试验工装的损坏的问题。
7.本实用自动数控车床机械手试验工装的目的与功效,由以下具体技术手段所达成:
8.一种自动数控车床机械手试验工装,包括:主体,所述主体的前侧镶嵌有钢化玻璃,且主体的侧面贯穿安装有横杆;卡板,卡板的外端设有凸块,且卡板滑动安装在转板外侧的凹槽内;载板,所述载板转动安装在底槽的内部,且载板安装在横杆的外侧,并且载板的外侧安装有螺纹杆;挡板,挡板滑动安装在内槽的内部。
9.进一步的,所述固定板包括:顶槽,顶槽的侧面为弧形结构,且顶槽设在主体的顶部两侧,并且顶槽的内部通过弹簧与固定板的底部相连接;盖板,盖板的侧端为倾斜状结
构,且盖板通过螺纹杆滑动安装在固定板的内部。
10.进一步的,所述横杆包括:转板,转板的外侧设有凹槽,且转板安装在横杆的侧端;卡槽,卡槽为矩形结构,且卡槽的内部通过弹簧安装在卡板;横杆,所述横杆贯穿底槽的内部,且横杆外部的卡槽设在主体的侧面底部。
11.进一步的,所述载板包括:外槽,外槽为扇形结构,且外槽设在载板的外侧;竖杆,竖杆的外侧设有刻度,且竖杆安装在滑板的顶部,并且竖杆的顶端安装在托板顶部的开孔内。
12.进一步的,所述载板还包括:托板,托板滑动安装在外槽的内部,且托板通过弹簧安装在推板的侧面,并且托板的顶部设有开孔;滑槽,滑槽的两侧设有凹槽,且滑槽设在托板的侧面。
13.进一步的,所述载板还包括:滑板,滑板的两端设有凸块,且滑板通过弹簧滑动安装在滑槽的内部;夹板,夹板的侧面设有橡胶垫,且夹板安装在滑板的侧面;推板,推板为弧形板结构,且推板通过螺纹杆安装在外槽的内部。
14.进一步的,所述主体包括:底槽,底槽的两侧设有凹槽,且底槽设在主体的底部;支架,支架安装在主体的底部,且支架为轻量化钢材。
15.进一步的,所述固定板还包括:内槽,内槽的内端设有开槽,且内槽设在盖板的内部;内板,内板为矩形条结构,且内板滑动安装在内槽内端的开槽内;固定板,所述固定板的顶部安装有螺纹杆,且固定板通过合页安装在主体的顶部两侧,且挡板的内侧通过弹簧与内板相连接。
16.与现有技术相比,本实用新型具有如下有益效果:
17.1、在本装置中,设置了推板,通过载板侧面的螺纹杆推动推板在外槽的内部进行移动,推板不同的移动距离,通过弹簧施加到托板的力度不同,通过两处夹板施加的压力模拟零件的重量,不需要频繁更换零件,提高试验的工作效率,使机械手对零件施加合适的力度,推板的移动,对机械手夹持力的测试力度比较精确,提高试验结果的准确性;
18.2、在本装置中,设置了盖板,在固定板的内部移动盖板,可以确定机械手的移动范围,机械手调节存在误差的时候,机械手撞击盖板或者挡板,使固定板通过合页减小翻转,可以缓冲机械手对盖板或者挡板的撞击,减少对试验工装的损坏,节约成本。
附图说明
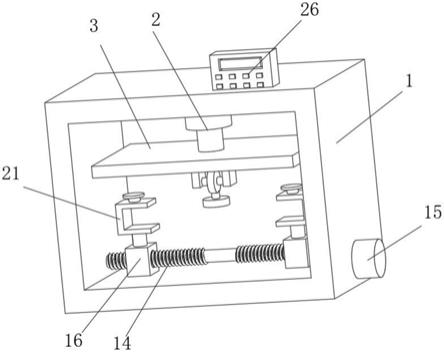
19.图1是本实用新型的立体结构示意图。
20.图2是本实用新型的支架立体结构示意图。
21.图3是本实用新型的横杆立体结构示意图。
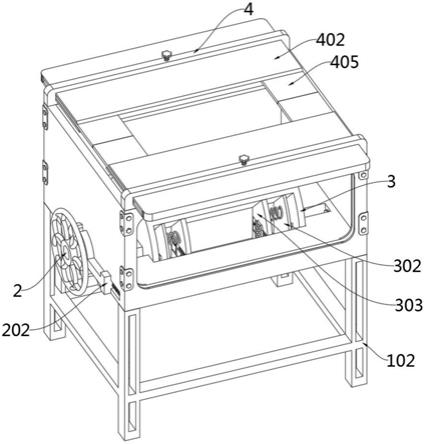
22.图4是本实用新型的载板截面结构示意图。
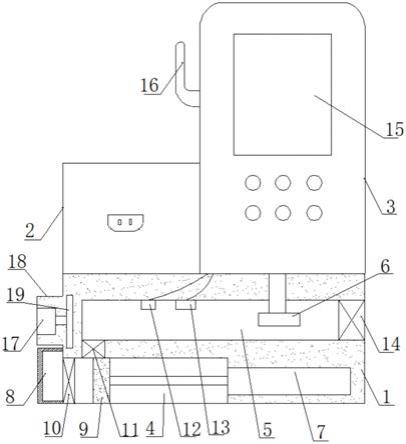
23.图5是本实用新型的固定板截面结构示意图。
24.图中,部件名称与附图编号的对应关系为:
25.1、主体;101、底槽;102、支架;2、横杆;201、转板;202、卡槽;203、卡板;3、载板;301、外槽;302、推板;303、托板;304、滑槽;305、滑板;306、夹板;307、竖杆;4、固定板;401、顶槽;402、盖板;403、内槽;404、内板;405、挡板。
具体实施方式
26.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
27.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.实施例:
30.如附图1至附图5所示:
31.本实用新型提供一种自动数控车床机械手试验工装,包括:主体1,主体1的前侧镶嵌有钢化玻璃,且主体1的侧面贯穿安装有横杆2;横杆2,横杆2贯穿底槽101的内部,横杆2为载板3的转动提供旋转力,且横杆2外部的卡槽202设在主体1的侧面底部;载板3,载板3转动安装在底槽101的内部,且载板3安装在横杆2的外侧,并且载板3的外侧安装有螺纹杆;固定板4,固定板4的顶部安装有螺纹杆,固定板4通过合页进行移动,具有导向作用,且固定板4通过合页安装在主体1的顶部两侧,使载板3可以移动到合适的角度,便于在底槽101的底部对载板3上的零件进行安装,使卡板203的卡合在转板201侧面的凹槽内,固定住转板201的位置,转板201上的四处凹槽与外槽301的位置相对应,使外槽301可以竖直朝上,竖杆307侧面的刻度可以推算出力度的大小,四处外槽301的内部可以放置不同材质,不同大小的零件,测试范围的多样性,在合页的作用下固定板4带动盖板402进行翻转,可以对机械手的撞击力件缓冲,防止造成试验工装的损坏,在弹簧的作用下使固定板4恢复原来的位置,便于进行下次的试验,主体1包括:底槽101,底槽101的两侧设有凹槽,且底槽101设在主体1的底部;支架102,支架102具有支撑主体1的作用,支架102安装在主体1的底部,且支架102为轻量化钢材,主体1前侧的钢化玻璃,便于观察机械手的试验过程,同时防止零件坠落发生撞击的情况,起到一定的防护作用,支架102为轻量化钢材,便于搬运主体1进行移动,底槽101的内部安装有载板3,横杆2包括:转板201,转板201的外侧设有凹槽,且转板201安装在横杆2的侧端;卡槽202,卡槽202为矩形结构,卡槽202具有导向作用,且卡槽202的内部通过弹簧安装在卡板203;卡板203,卡板203的外端设有凸块,且卡板203滑动安装在转板201外侧的凹槽内,通过横杆2侧端的把手转动横杆2,横杆2带动载板3移动到合适的位置以后,使卡板203在卡槽202的内部进行移动。
32.其中,载板3包括:外槽301,外槽301为扇形结构,外槽301具有导向作用,使推板302以及托板303水平移动,且外槽301设在载板3的外侧;推板302,推板302为弧形板结构,且推板302通过螺纹杆安装在外槽301的内部;托板303,托板303滑动安装在外槽301的内部,且托板303通过弹簧安装在推板302的侧面,并且托板303的顶部设有开孔;滑槽304,滑
槽304具有导向作用,滑槽304的两侧设有凹槽,且滑槽304设在托板303的侧面;滑板305,滑板305的两端设有凸块,且滑板305通过弹簧滑动安装在滑槽304的内部;夹板306,夹板306的侧面设有橡胶垫,且夹板306安装在滑板305的侧面;竖杆307,竖杆307的外侧设有刻度,且竖杆307安装在滑板305的顶部,并且竖杆307的顶端安装在托板303顶部的开孔内,在进行不同机械手夹持力试验的时候,调节载板3外侧的螺纹杆带动推板302在外槽301的内部进行移动,通过弹簧对托板303施加不同的压力,模拟零件重量的不同,两处夹板306夹持在零件的两侧,夹板306侧面的橡胶垫可以对零件进行防护,机械手拉动零件向上移动,使滑板305在滑槽304的内部进行移动,滑板305带动竖杆307在滑槽304的内部移动并且贯穿托板303的顶部进行移动,固定板4包括:顶槽401,顶槽401的侧面为弧形结构,且顶槽401设在主体1的顶部两侧,并且顶槽401的内部通过弹簧与固定板4的底部相连接;盖板402,盖板402的侧端为倾斜状结构,且盖板402通过螺纹杆滑动安装在固定板4的内部;内槽403,内槽403的内端设有开槽,内槽403具有导向作用,同时储存挡板405的作用,且内槽403设在盖板402的内部;内板404,内板404为矩形条结构,且内板404滑动安装在内槽403内端的开槽内;挡板405,挡板405滑动安装在内槽403的内部,挡板405以及盖板402具有限制机械手移动范围的作用,且挡板405的内侧通过弹簧与内板404相连接,两处固定板4通过合页安装在主体1的顶部侧面,根据机械手的移动范围,使盖板402在固定板4的内部进行移动,通过固定板4顶部的螺纹杆固定住盖板402的位置,同时使挡板405带动内板404在内槽403的内部进行移动,在弹簧的作用下使相对的两处挡板405贴合在一起,确定机械手的移动范围,机械手移动产生的误差时,撞击盖板402或者挡板405。
33.本实施例的具体使用方式与作用:
34.本实用新型中,在进行自动数控车床机械手试验的时候,首先确定机械手的移动范围,盖板402在固定板4内移动,两处盖板402移动到合适位置通过螺纹杆固定住盖板402的位置,挡板405带动在内槽403内滑动,在弹簧的作用下使相对的两处挡板405闭合,盖板402与挡板405形成的空间限制机械手的移动范围,机械手移动产生的误差撞击盖板402或者挡板405,固定板4带动盖板402进行翻转缓冲撞击力,再在夹板306的侧面安装零件,横杆2带动载板3使一处外槽301朝下,转动载板3外侧的螺纹杆带动推板302在外槽301内移动,通过弹簧对托板303施加不同的压力,两处夹板306夹持在零件的两侧,再通过横杆2侧端的把手转动横杆2,使一处外槽301朝上,在弹簧的作用下卡板203在卡槽202内移动插在转板201侧面的凹槽内,固定住转板201的位置,机械手拉动零件移动使滑板305在滑槽304内移动,根据竖杆307侧面的刻度推算出力度的大小。
35.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。