1.本发明涉及地图管理装置以及地图管理方法。
背景技术:
2.车辆的自动驾驶系统为了对车辆进行自动驾驶控制而参照的高精度的地图中需要准确地表示出与道路环境有关的信息。为此,提出了一种方案,即,服务器随时更新地图,车辆的自动驾驶系统利用从服务器下载的地图。
3.专利文献1中记载了一种利用高精度地图的自动驾驶系统。在专利文献1所记载的自动驾驶系统中,当不在自动驾驶期间的情况下,将车辆存储的道路结构图与服务器的图进行比较,在判定为不是最新版本的情况下,从服务器取得更新数据并进行更新。
4.现有技术文献
5.专利文献1:日本特开2018
‑
205093号公报
技术实现要素:
6.发明所要解决的问题
7.在自动驾驶系统中,希望有效地利用车辆中的高精度地图的存储区域。在专利文献1的自动驾驶系统中,没有充分进行将自动驾驶考虑在内的存储区域的有效利用。
8.本发明的目的在于提供能够有效地利用车辆的存储区域的地图管理装置。
9.用于解决问题的技术方案
10.本发明涉及的地图管理装置具备:评价部,其针对车辆内的存储部所保存的用于该车辆的自动驾驶控制的多个地图中的每个地图,基于表示用于自动驾驶控制的区间的区间信息,评价利用频率;以及删除部,其将利用频率低于频率阈值的地图从存储部中删除。
11.本发明涉及的地图管理装置优选地还具备:保存判定部,其在开始沿着行驶路线的自动驾驶前,判定存储部是否保存有包含行驶路线所包含的每个区间的区间地图;以及地图取得部,其在存储部没有保存区间地图的情况下,从服务器一起取得区间地图和表示该区间地图的更新阶段的版本信息并保存于存储部,在存储部保存有区间地图并且服务器所保存的区间地图的版本信息表示的更新阶段比存储部所保存的区间地图的版本信息表示的更新阶段新的情况下,从服务器取得存储部所保存的区间地图与服务器所保存的区间地图的差量,并与服务器所保存的区间地图的版本信息一起保存于存储部。
12.在本发明涉及的地图管理装置中,优选地,评价部将所述多个地图中的用于自动驾驶控制的累计距离短的地图的利用频率评价得低。
13.在本发明涉及的地图管理装置中,优选地,评价部将所述多个地图中的用于自动驾驶控制的次数中的从自动驾驶控制向手动驾驶的切换次数多的地图的利用频率评价得低。
14.本发明涉及的地图管理装置优选地还具备路线制作部,所述路线制作部通过选择存储部所保存的地图所包含的区间以使得从起点到终点连续来制作行驶路线。
15.本发明涉及的地图管理方法包括:针对车辆内的存储部所保存的用于该车辆的自动驾驶控制的多个地图中的每个地图,基于表示用于自动驾驶控制的区间的区间信息,评价利用频率;以及将利用频率低于频率阈值的地图从所述存储部中删除。
16.发明效果
17.根据本发明涉及的地图管理装置,能够有效地利用车辆的存储区域。
附图说明
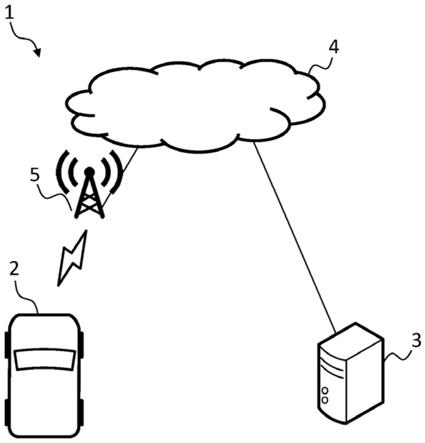
18.图1是包括地图管理装置的地图配送(广播)系统的概略构成图。
19.图2是包括ecu的车辆的概略构成图。
20.图3是ecu的硬件构成图。
21.图4是ecu具有的处理器的功能框图。
22.图5是说明路线制作处理的概要的图。
23.图6是表示地图管理表的例子的图。
24.图7是地图删除处理的动作流程图。
25.图8是地图更新处理的动作流程图。
26.图9是服务器的硬件构成图。
27.标号说明
28.1地图配送系统;2车辆;25ecu;53处理器;531路线制作部;532自动驾驶控制部;533评价部;534删除部;535保存判定部;536地图取得部。
具体实施方式
29.以下,参照附图,对地图管理装置详细进行说明。地图管理装置对车辆内的存储部所保存的用于该车辆的自动驾驶控制的多个高精度地图(以下,也简称为“地图”)中的每一个,基于表示用于自动驾驶控制的区间的区间信息来评价利用频率。而且,地图管理装置将利用频率低于频率阈值的地图从存储部中删除。
30.图1是包括地图管理装置的地图配送系统的概略构成图。地图配送系统1具有车辆2以及服务器3,车辆2包括ecu(electronic controller unit,电子控制单元),ecu是地图管理装置的一个实施方式。车辆2例如通过访问(access)经由网关等与服务器3所连接的通信网络4连接的无线基站5,从而经由无线基站5以及通信网络4与服务器3连接。此外,地图配送系统1也可以具有多个车辆2。另外,在地图配送系统1中,也可以为多个无线基站5连接于通信网络4。
31.图2是包括ecu的车辆的概略构成图。车辆2具有摄像头21、gnss(全球导航卫星系统)接收机22、dcm(data communication module,数据通信模块)23、储存(storage)装置24以及ecu25。摄像头21、gnss接收机22、dcm23以及储存装置24与ecu25经由遵照控制器域网(can)这样的标准的车内网络可通信地连接。
32.摄像头21是传感器的一例,具有由ccd(电荷耦合器件)或者c
‑
mos(互补金属氧化物半导体)等对可见光具有灵敏度的光电转换元件的阵列所构成的二维检测器、以及将该二维检测器上的成为拍摄对象的区域的像进行成像的成像光学系统。摄像头21例如以朝向车辆2前方的方式安装在车辆2的车室内。摄像头21按预定的拍摄周期(例如1/30秒~1/10
秒)拍摄车辆2的前方区域,生成映现有该前方区域的图像。由摄像头21获得的图像既可以为彩色图像,也可以为单色(黑白)图像。此外,车辆2中也可以设置有多个摄像头,多个摄像头的拍摄方向或者焦点距离也可以互不相同。
33.摄像头21每次生成图像时,将该生成的图像经由车内网络向ecu25输出。
34.gnss接收机22按预定周期接收来自gnss(global navigation satellite system,全球导航卫星系统)卫星的gnss信号,基于接收到的gnss信号测量车辆2的自身位置。gnss接收机22按预定周期将表示基于gnss信号的车辆2的自身位置的定位结果的定位信号经由车内网络向ecu25输出。
35.dcm23是通信部的一例,是执行遵照所谓的4g(4th generation)或者5g(5th generation)这样的预定的无线通信标准的无线通信处理的设备。dcm23例如通过访问无线基站5,经由无线基站5以及通信网络4与服务器3连接。dcm23接收来自无线基站5的下行链路的无线信号,将该无线信号包含的表示来自服务器3的数据发送请求的数据发送请求信号交给ecu25。另外,dcm23使从ecu25收取到的数据包含于上行链路的无线信号,将该无线信号向无线基站5发送,从而向服务器3发送数据。
36.储存装置24是存储部的一例,例如具有硬盘装置或者非易失性的半导体存储器。储存装置24保存用于自动驾驶控制的地图和用于制作行驶路线的路线制作用地图。储存装置24经由车内网络从ecu25接收地图,并按照来自ecu25的写入请求而写入接收到的地图。地图包含关于预定区域所包含的各道路的表示车道标线或者停止线这样的道路标示的信息以及表示道路标识的信息这样的地物信息。多个地图中的每个地图的区域或者所表示的地物信息的种类不同,ecu25根据自动驾驶控制所要求的信息选择地图。储存装置24按照来自ecu25的地图读取请求而读取地图,并经由车内网络将读取到的地图交给ecu25。
37.ecu25利用由摄像头21生成的图像和储存装置24所保存的地图,执行车辆2的自动驾驶控制。另外,ecu25对储存装置24所保存的多个地图中的每个地图,评价其用于自动驾驶控制的利用频率,将利用频率低于频率阈值的地图从储存装置24中删除。
38.图3是ecu25的硬件示意图。ecu25具备通信接口51、存储器52以及处理器53。
39.通信接口51是通信部的一例,具有用于将ecu25连接至车内网络的通信接口电路。通信接口51将接收到的数据供给到处理器53。另外,通信接口51将从处理器53供给的数据输出到外部。
40.存储器52具有易失性的半导体存储器以及非易失性的半导体存储器。存储器52保存由处理器53进行的处理中所使用的各种数据、例如包含地图的利用频率的评价的地图管理表、与利用频率有关的频率阈值等。另外,存储器52保存各种应用程序、例如执行地图更新处理的地图更新程序等。
41.处理器53是控制部的一例,具有一个以上的处理器及其外围电路。处理器53也可以还具有逻辑运算单元、数值运算单元或者图形处理单元这样的其他的运算电路。
42.图4是ecu25具有的处理器53的功能框图。
43.ecu25的处理器53具有路线制作部531、自动驾驶控制部532、评价部533、删除部534、保存判定部535以及地图取得部536作为功能块。处理器53具有的这些各部分是由在处理器53上执行的程序实现的功能模块。或者,处理器53具有的这些各部分也可以作为独立的集成电路、微处理器或者固件安装于ecu25。
44.路线制作部531参照储存装置24所保存的路线制作用地图,按照迪克斯特拉(dijkstra)算法这样的预定的路径搜索方法,选择区间以使得从起点到终点连续,由此制作行驶路线。区间对应于在表示交叉路口及其他道路网表现上的枢纽的节点间连接的道路。此时,路线制作部531通过选择储存装置24所保存的地图所包含的区间来制作行驶路线。在无法通过选择储存装置24所保存的地图所包含的区间来制作行驶路线的情况下,路线制作部531基于路线制作用地图,选择储存装置24所保存的地图中不包含的区间来制作行驶路线。此外,起点例如是车辆2的当前位置,可以利用由从gnss接收机22接收到的最新的定位结果得到的车辆2的自身位置。终点例如是由驾驶员指定的地点。
45.图5是说明路线制作处理的概要的图。在图5的例子中,地图m1包含干线道路的周边区域的详细的地物信息。另外,地图m2包含干线道路以及居住区道路的地物信息。地图m1被保存于储存装置24,地图m2没被保存于储存装置24。
46.路线制作部531通过选择储存装置24所保存的地图m1所包含的区间r1、r2、r3,制作从起点s到终点g的行驶路线。地图m2所包含的区间r4、r5由于没被保存于储存装置24,因此不被选择为行驶路线。
47.回到图4,自动驾驶控制部532利用储存装置24所保存的多个地图执行车辆2的自动驾驶控制。自动驾驶控制部532例如基于由摄像头21得到的图像以及从储存装置24读取到的地图,决定加速器开度、转向器的转向角或者制动量等控制量以使得沿着由路线制作部531制作的行驶路线行驶,并按照该控制量控制对加速器、转向器或制动器等进行控制的致动器。
48.评价部533针对多个地图中的每个地图,基于表示用于自动驾驶控制的区间的区间信息,评价利用频率。
49.图6是表示地图管理表的例子的图。地图管理表521是按地图将表示地图的更新阶段(版本)的版本信息、储存装置24所保存的地图的利用状况、与基于地图的利用状况评价出的利用频率相关联的信息。地图管理表521保存于存储器52。
50.在地图管理表521中,作为地图的利用状况,按地图关联有利用于自动驾驶控制的次数、自动驾驶控制的行驶距离的累计值、和当在自动驾驶控制中被利用时发生手动驾驶交替的次数。
51.自动驾驶控制的行驶距离是连续通过自动驾驶控制行驶的实际行驶距离。例如假设制作了通过自动驾驶控制在区间a(15km)、区间b(5km)和区间c(10km)的合计30km行驶的行驶路线,其中在区间b,从自动驾驶切换为手动驾驶进行了行驶。在该情况下,自动驾驶控制的行驶距离为15km(区间a) 10km(区间c)=25km。
52.在图6的例子中,利用频率是根据下式算出的值。
53.[利用频率]=[利用次数]
×
[累计距离]/[累计距离]的平均值
×
([利用次数]
‑
[交替次数])/([利用次数]
‑
[交替次数])的平均值(式1)
[0054]
通过根据式1算出利用频率,评价部533将用于自动驾驶控制的累计距离短的地图的利用频率评价得低。另外,通过根据式1算出利用频率,评价部533将用于自动驾驶控制的次数中的从自动驾驶控制向手动驾驶的切换次数多的地图的利用频率评价得低。
[0055]
利用频率也可以根据式1以外的式子算出。另外,利用频率也可以不按地图相关联地保存于地图管理表521。在该情况下,评价部533根据利用频率的请求从存储器52读取地
图管理表521,基于存储于地图管理表521的利用状况算出利用频率。
[0056]
回到图4,删除部534将利用频率低于频率阈值的地图从储存装置24中删除。
[0057]
保存判定部535在开始沿着行驶路线的自动驾驶前,判定储存装置24是否保存有包含行驶路线所包含的每个区间的区间地图。
[0058]
地图取得部536在储存装置24没有保存区间地图的情况下,从服务器3一起取得区间地图和版本信息并保存于储存装置24。另外,地图取得部536在储存装置24保存有区间地图并且服务器3所保存的区间地图的版本比储存装置24所保存的区间地图的版本新的情况下,从服务器3取得储存装置24所保存的区间地图与服务器3所保存的区间地图的差量,并与服务器所保存的区间地图的版本信息一起保存于储存装置24。
[0059]
图7是地图删除处理的动作流程图。车辆2的ecu25按照以下的动作流程图,在预定周期反复对储存装置24所存储的多个地图中的每个地图执行地图删除处理。
[0060]
首先,评价部533评价储存装置24所存储的多个地图中的一个地图被利用于自动驾驶控制的利用频率(步骤s11)。
[0061]
接着,删除部534判定该一个地图的利用频率是否低于频率阈值(步骤s12)。删除部534在利用频率低于频率阈值的情况下(步骤s12:是),将该一个地图删除(步骤s13),并结束对于该一个地图的地图删除处理。另外,删除部534在利用频率不低于频率阈值的情况下(步骤s12:否),结束对于该一个地图的地图删除处理。
[0062]
通过ecu25如上这样执行地图删除处理,ecu25能够有效地利用车辆2的存储区域。
[0063]
图8是地图更新处理的动作流程图。车辆2的ecu25在开始自动驾驶前,按照以下的动作流程图,对包含行驶路线的每个地图执行地图更新处理。
[0064]
首先,保存判定部535判定储存装置24是否保存有包含行驶路线的地图(步骤s21)。
[0065]
在储存装置24没有保存地图的情况下(步骤s21:否),地图取得部536从服务器3一起取得地图和版本信息并保存于储存装置24(步骤s22),并结束地图更新处理。在储存装置24保存有地图的情况下(步骤s21:是),地图取得部536判定服务器3所保存的地图的版本是否比储存装置24所保存的地图的版本新(步骤s23)。
[0066]
在服务器3所保存的地图的版本较新的情况下(步骤s23:是),地图取得部536从服务器3取得储存装置24所保存的地图与服务器3所保存的地图的差量,与版本信息一起保存于储存装置24(步骤s24),并结束地图更新处理。在服务器所保存的地图的版本不比储存装置24所保存的地图新(相同)的情况下(步骤s23:否),地图取得部536结束地图更新处理。
[0067]
通过ecu25如上这样执行地图更新处理,ecu25能够更有效地利用车辆2的存储区域。
[0068]
图9是服务器3的硬件构成图。服务器3存储地图,并经由通信网络4向车辆2配送地图。为此,服务器3具有通信接口31、储存装置32以及处理器33。
[0069]
通信接口31具有用于将服务器3连接于通信网络的接口电路。而且,通信接口31构成为能够经由通信网络4以及无线基站5与车辆2通信。即,通信接口31将经由无线基站5以及通信网络4从车辆2接收到的地图请求信号交给处理器33。另外,通信接口31将从处理器33收取到的地图经由通信网络4以及无线基站5发送给车辆2。
[0070]
储存装置32例如具有硬盘装置或者光存储介质及其存取装置。储存装置32将地图
与版本信息一起进行存储。另外,储存装置32存储地图的不同版本间的差量。再者,储存装置32也可以存储处理器33上执行的、用于执行地图配送处理的计算机程序。
[0071]
处理器33具有一个或多个cpu(central processing unit)及其外围电路。处理器33也可以还具有逻辑运算单元或者数值运算单元这样的其他的运算电路。
[0072]
处理器33在从车辆2接收到版本请求信号的情况下,将存储于储存装置32的版本信息经由通信接口31、通信网络4以及无线基站5发送给车辆2。
[0073]
另外,处理器33基于从车辆2接收到的地图请求信号,将存储于储存装置32的地图或者地图的差量经由通信接口31、通信网络4以及无线基站5发送给车辆2。
[0074]
根据变形例,摄像头21也可以是取得车辆2周边的距离图像的lidar(light detection and ranging,激光雷达)传感器。距离图像是各像素具有与到该像素所表示的物体的距离相应的值的图像。
[0075]
本领域技术人员应当理解,在不脱离本发明的精神和范围的情况下,可以加以各种变更、替换和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。