1.本公开涉及玻管拉管生产领域,具体地,涉及一种玻管拉管速度波动的监控装置和监控方法。
背景技术:
2.目前,玻管拉管线通过牵引机的夹持拖拽为玻管输送提供动力,连续玻管拉管的速度波动是影响拉管线玻管品质的核心因素。现有的速度波动监控通常通过牵引机伺服电机计算出与玻管接触位置的轮或皮带的速度,并根据该速度波动来监控玻管拉管的速度波动。
3.然而,在实际生产中,夹持拖拽玻管的轮或皮带易出现磨损,或与玻管之间出现打滑,导致对玻管拉管速度波动的监控失真,不利于玻管拉管的品质控制。
技术实现要素:
4.本公开的目的是提供一种玻管拉管速度波动的监控装置和监控方法,以解决玻管拉管速度波动监控失真的技术问题。
5.为了实现上述目的,根据本公开实施例的第一方面,提供一种玻管拉管速度波动的监控装置,玻管由拉管线以预设速度v沿第一方向输送,所述监控装置包括:标记机构,设置在所述玻管的正上方,所述标记机构配置为:能够每间隔预设时间t在所述玻管上做出可视的标记;以及监测机构,沿所述第一方向设置在所述标记机构的下游,所述监测机构的拍摄中心与所述标记机构的标记中心之间的距离为l,其中,l=vt,所述监测机构配置为:在所述标记机构做出所述标记之后等待所述预设时间t,所述监测机构拍摄所述玻管的照片,并根据所述标记在所述照片中的实际位置p1计算所述实际位置p1与理论位置p之间的位移l1,以监控所述玻管拉管速度波动,其中,所述理论位置p配置为:所述玻管以预设速度v沿所述第一方向匀速移动时,所述标记在所述照片中的位置。
6.可选地,所述监测机构包括:采集部,用于拍摄所述玻管的照片;以及分析部,用于计算所述位移l1。
7.可选地,所述监测机构的拍摄中心、所述标记机构的标记中心以及所述玻管的中心轴线三者共面,所述照片的中心为所述标记的理论位置p。
8.可选地,所述监测机构还包括:处理部,用于输出所述位移l1随时间变化的曲线,以反映所述玻管拉管的实际速度相对于所述预设速度v随时间的波动。
9.可选地,所述监测机构包括矩阵相机。
10.可选地,还包括机架,所述标记机构和所述监测机构设置在所述机架上,所述标记机构和所述监测机构之间的距离可调。
11.根据本公开实施例的第二方面,提供一种玻管拉管速度波动的监控方法,包括以下步骤:控制玻管以预设速度v沿第一方向移动;在第一位置,每间隔预设时间t在玻管上做出可视的标记;等待预设时间t,在距离所述第一位置为l的第二位置处拍摄所述玻管的照
片,其中,所述第一位置、所述第二位置以及所述玻管的中心轴线三者共面,且l=vt;根据所述标记在所述照片中的实际位置p1计算所述实际位置p1与理论位置p之间的位移l1,其中,所述理论位置p配置为:所述玻管以所述预设速度v沿所述第一方向匀速移动时,所述标记在所述照片中的位置。
12.可选地,还包括:输出所述位移l1随时间变化的曲线。
13.可选地,还包括:根据所述位移l1随时间变化的曲线,得到给定时间段内l1的最大值l
max
和最小值l
min
;通过公式(l
max
‑
l
min
)/l*100%计算该给定时间段内玻管拉管的实际速度相对于所述预设速度v的波动率。
14.通过上述技术方案,本公开实施例提供的玻管拉管速度波动的监控装置中,标记机构能够在玻管上做出可视的标记,监测机构能够在距离标记机构为l处对玻管进行拍照,并计算照片中标记的实际位置p1与理论位置p之间的位移l1,由于理论位置p为玻管以预设速度v匀速移动t时的位置,因此,若l1不为0,则代表玻管在t内移动的实际速度偏离了预设速度v,具体地,若l1大于0,即p1沿第一方向位于p的下游,则代表玻管在t内移动的实际速度大于v,若l1小于0,即p1沿第一方向位于p的上游,则代表玻管在t内移动的实际速度小于v。根据监测机构对l1的计算,能够对玻管拉管速度以预设时间t为单位进行连续的监控,且监控结果具有实时性和准确性。本公开实施例提供的玻管拉管速度波动的监控方法能够每间隔预设时间t对玻管进行标记,并在标记之后间隔预设时间t对玻管进行拍照和分析,通过分析l1的大小和方向,能够监控玻管拉管的实际速度相对于预设速度v的波动,从而实现以预设时间t为单位对玻管拉管速度进行连续的监控,且监控结果具有实时性和准确性。
15.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
16.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
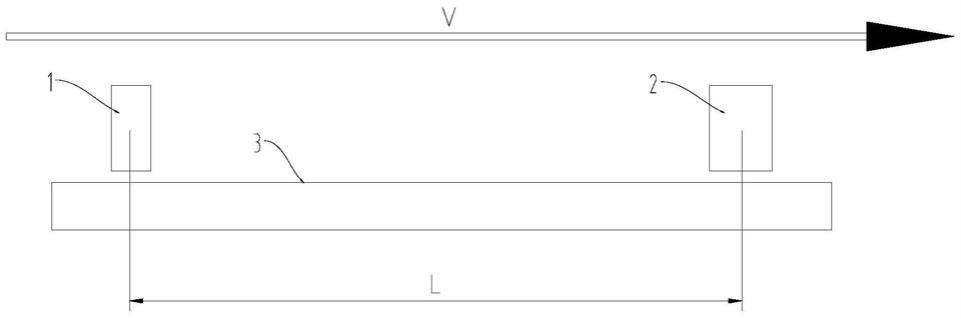
17.图1是本公开具体实施方式中玻管拉管速度波动的监控装置的结构示意图;
18.图2是本公开具体实施方式中监测机构所拍摄的玻管照片的示意图;
19.图3是本公开具体实施方式中玻管拉管速度波动的监控方法的流程图。
20.附图标记说明
[0021]1‑
标记机构,2
‑
监测机构,3
‑
机架。
具体实施方式
[0022]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0023]
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下”通常是指监控装置安装在拉管线上时在正常使用状态的上、下,参考图1的图面方向,“上游、下游”通常是指玻管通过拉管线沿第一方向由上游向下游输送,“内、外”是指相对于相应零部件自身轮廓的内、外。使用的术语如“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。此外,下面的描述在涉及附图时,不同附图中的同一标记表示相同的要素。
[0024]
为了实现上述目的,根据本公开实施例的第一方面,提供一种玻管拉管速度波动
的监控装置,参考图1所示,玻管由拉管线以预设速度v沿第一方向输送,所述第一方向为图1中的箭头方向,该监控装置可以包括标记机构1和监测机构2,其中,标记机构1设置在玻管的正上方,标记机构1可以配置为能够每间隔预设时间t在玻管上做出可视的标记,监测机构2沿第一方向设置在标记机构1的下游,监测机构2的拍摄中心与标记机构1的标记中心之间的距离为l,其中,l=vt,监测机构2可以配置为:在标记机构1做出标记之后等待预设时间t,监测机构2拍摄玻管的照片,照片如图2所示,监测机构2根据标记在照片中的实际位置p1计算实际位置p1与理论位置p之间的位移l1,以监控玻管拉管速度波动,其中,理论位置p配置为:玻管以预设速度v沿第一方向匀速移动时,标记在照片中的位置。
[0025]
通过上述技术方案,本公开实施例提供的玻管拉管速度波动的监控装置中,标记机构1能够在玻管上做出可视的标记,监测机构2能够在距离标记机构1为l处对玻管进行拍照,并计算照片中标记的实际位置p1与理论位置p之间的位移l1,由于理论位置p为玻管以预设速度v匀速移动t时的位置,因此,若l1不为0,则代表玻管在t内移动的实际速度偏离了预设速度v,具体地,若l1大于0,即p1沿第一方向位于p的下游,则代表玻管在t内移动的实际速度大于v,若l1小于0,即p1沿第一方向位于p的上游,则代表玻管在t内移动的实际速度小于v。根据监测机构2对l1的计算,能够对玻管拉管速度以预设时间t为单位进行连续的监控,且监控结果具有实时性和准确性。
[0026]
监测机构2可以包括采集部(未示出)和分析部(未示出),其中,采集部可以用于拍摄玻管的照片,分析部可以用于计算位移l1。
[0027]
监测机构2的拍摄中心、标记机构1的标记中心以及玻管的中心轴线可以共面设置,使得照片的中心为标记的理论位置p,参考图2所示。具体地,照片的尺寸可以为a*b,分析部可以根据照片的尺寸来计算理论位置p与实际位置p1之间的距离。
[0028]
此外,监测机构2还可以包括处理部(未示出),用于输出位移l1随时间变化的曲线,以反映玻管拉管的实际速度相对于预设速度v随时间的波动,为牵引机运行品质提供监控。具体地,处理部可以输出x轴坐标以预设时间t为单位,y轴坐标为l1的时间
‑
位移曲线。根据该时间
‑
位移曲线,可以方便地得到给定时间段内l1的最大值l
max
和最小值l
min
,从而能够通过公式(l
max
‑
l
min
)/l*100%计算该给定时间段内玻管拉管的实际速度相对于预设速度v的波动率。
[0029]
监测机构2可以为视觉测量系统,并包括矩阵相机。
[0030]
此外,监控装置还可以包括机架3,参考图1所示,标记机构1和监测机构2可以设置在机架3上,标记机构1和监测机构2之间的距离可调。具体地,在安装监控装置时,先将机架3安装在拉管线上,再根据拉管线的牵引速度即玻管移动的预设速度v和预设时间t确定距离l,之后将标记机构1和监测机构2连接在机架3上,并调节监测机构2的拍摄中心、标记机构1的标记中心使得两者之间的距离为l,同时确保监测机构2的拍摄中心、标记机构1的标记中心以及玻管的中心轴线共面。安装好后,对标记机构1和监测机构2进行调试,使得标记机构1在玻管上产生的标记清晰,且监测机构2所拍摄的照片清晰。若拉管线的牵引速度调整,则重复以上流程。
[0031]
根据本公开实施例的第二方面,还提供一种玻管拉管速度波动的监控方法,该监控方法可以通过上述技术方案中的监控装置来实施,参考图3所示,该监控方法可以包括步骤s1至步骤s4。
[0032]
在步骤s1中,控制玻管以预设速度v沿第一方向移动。
[0033]
在步骤s2中,在第一位置,每间隔预设时间t在玻管上做出可视的标记。
[0034]
在步骤s3中,等待预设时间t,在距离第一位置为l的第二位置处拍摄玻管的照片,其中,第一位置、第二位置以及玻管的中心轴线三者共面,且l=vt。
[0035]
在步骤s4中,根据标记在照片中的实际位置p1计算实际位置p1与理论位置p之间的位移l1,其中,理论位置p配置为:玻管以预设速度v沿第一方向匀速移动时,标记在照片中的位置。
[0036]
通过上述技术方案,本公开实施例提供的玻管拉管速度波动的监控方法能够每间隔预设时间t对玻管进行标记,并在标记之后间隔预设时间t对玻管进行拍照和分析,通过分析l1的大小和方向,能够监控玻管拉管的实际速度相对于预设速度v的波动,从而实现以预设时间t为单位对玻管拉管速度进行连续的监控,且监控结果具有实时性和准确性。
[0037]
此外,该监控方法还可以包括步骤s5:输出位移l1随时间变化的曲线。通过步骤s5,能够输出x轴坐标以预设时间t为单位,y轴坐标为l1的时间
‑
位移曲线,该曲线能够反映玻管拉管的实际速度相对于预设速度v随时间的波动,为牵引机运行品质提供监控。
[0038]
此外,该监控方法还可以包括以下步骤s6及步骤s7。
[0039]
在步骤s6中,根据位移l1随时间变化的曲线,得到给定时间段内l1的最大值l
max
和最小值l
min
。
[0040]
在步骤s7中,通过公式(l
max
‑
l
min
)/l*100%计算该给定时间段内玻管拉管的实际速度相对于预设速度v的波动率。
[0041]
在玻管的实际生产中,通过计算上述波动率,可以为拉管工艺对策提供数据。
[0042]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0043]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0044]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。