技术特征:
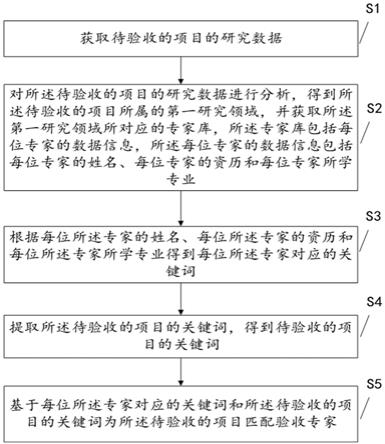
1.基于北斗的微形变预测方法,其特征在于,包括:获取位移数据集,所述位移数据集包括至少两组位移数据,所述位移数据是通过卫星测量得到的目标的三维位移量,所述三维位移量为第二时刻相对于第一时刻的位移量;将所述位移数据集中的每个所述位移数据分别进行计算,分别得到每个所述位移数据的位移形变数据,所述位移形变数据为在所述位移数据集中通过预测算法模块提取出的数据;根据所述位移形变数据,建立预测模型,并通过所述预测模型计算出所述目标在第三时刻相对于第二时刻的位移量预测结果。2.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述将位移数据集中的每个位移数据分别进行计算,分别得到位移形变数据,包括:通过箱型图分析方法对每个所述位移数据进行异常值判断;获取每个所述位移数据的异常值判断结果,若判断结果正常,则记做第一信息,若判断结果不正常,则剔除;对判断结果正常的所述第一信息的空缺部分进行填补;获取填补后的所述第一信息,将所述第一信息记做位移形变数据。3.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述根据所述位移形变的数据,建立预测模型,包括:将所述位移形变数据经过预设公式进行转化得到转化数据集,转化公式如下:其中,式中为所有位移原始数据的均值,为所有位移数据的标准差,为均值方差归一化的结果,为需要处理的数据;更新所述位移形变数据为所述转化数据集。4.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述根据所述位移形变的数据,建立预测模型,包括:更新所述位移形变数据为所述转化数据集,根据所述转化数据集,建立第一模型,所述第一模型包括更新门单元和重置门单元,所述第一模型的每个门单元和隐藏层的计算公式如下:如下:如下:如下:式中,rt为更新门单元,zt为重置门单元,为sigmoid激活函数,为双曲正切激活函数,为当前的输入,为当前输出,表示候选激活向量,为之前的输出,和是更新门单元的权重,和是重置门单元的权重,和是输出候选值,、和
分别是更新门单元、重置门单元和输出候选值的偏置向量。5.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述根据所述位移形变的数据,建立预测模型,还包括:更新所述位移形变数据为所述转化数据集,根据所述转化数据集,建立第二模型;通过所述第二模型,求解自回归过程,计算公式如下:;式中,,,,表示ar的系数,为当前输出,,,,为之前的输入,为第t个时间序列的白噪声;根据所述自回归过程获取到移动平均过程,计算如下:式中, 、,表示对应输入的误差,为随机干扰项序列,,,,表示对应的权重系数,为白噪声;根据所述自回归过程和所述移动平均过程,求解得到自回归移动平均,计算公式如下:式中,表示误差,式中,,,,表示ar的系数,为当前输出,,,,为之前的输入,、,表示对应输入的误差,,,,表示对应的权重系数。6.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述根据所述位移形变的数据,建立预测模型, 并通过所述预测模型计算出第三时刻最终位移预测结果,包括:更新所述位移形变数据为所述转化数据集,根据所述转化数据集,建立第三模型;通过第三模型,求解回归系数,计算公式如下:式中,为样本点x变量的自变量矩阵,ki为角矩阵。7.根据权利要求1所述的基于北斗的微形变预测方法,其特征在于,所述根据所述位移形变的数据,建立预测模型,并通过所述预测模型计算出第三时刻最终位移预测结果,还包括:根据所述位移形变的数据作为预测模型的输入信息,得到每个预测模型的位移数据预测结果,将所述预测结果和真实情况作差,得到每个基本模型的拟合误差;根据每个基本模型的拟合误差,计算得到每个基本模型对应的平均平方误差,其计算
公式为:式中,表示每个基本模型的拟合误差;根据每个基本模型的平均平方误差,计算出每个基本模型的权值,其计算公式为:式中,表示每个基本模型的平均平方误差;根据每个基本模型的权值和所有基本模型,建立最佳权重线性组合模型,其最佳权重线性组合模型公式为:式中,表示每个基本模型的预测数据,每个模型的权重表示为,的和为1;求解所述最佳权重线性组合模型,得到最终位移预测结果。8.一种基于北斗的微形变预测装置,其特征在于,包括:获取模块:用于获取位移数据集,所述位移数据集包括至少两组位移数据,所述位移数据是通过卫星测量得到的目标的三维位移量,所述三维位移量为第二时刻相对于第一时刻的位移量;提取模块:用于将所述位移数据集中的每个所述位移数据分别进行计算,分别得到每个所述位移数据的位移形变数据,所述位移形变数据为在所述位移数据集中通过预测算法模块提取出的数据;计算模块:用于根据所述位移形变数据,建立预测模型,并通过所述预测模型计算出所述目标在第三时刻相对于第二时刻的位移量预测结果。9.一种基于北斗的微形变预测设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如权利要求1至7任一项所述的基于北斗的微形变预测方法的步骤。10.一种可读存储介质,其特征在于:所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的基于北斗的微形变预测方法的步骤。
技术总结
本发明提供了一种基于北斗的微形变预测方法、装置、设备及可读存储介质,涉及卫星监测技术领域,包括获取位移数据集,所述位移数据集包括至少两组位移数据,所述位移数据是通过卫星测量得到的目标的三维位移量,将所述位移数据集中的每个所述位移数据分别进行计算,分别得到每个所述位移数据的位移形变数据;根据所述位移形变数据,建立预测模型,并通过所述预测模型计算出所述目标在第三时刻相对于第二时刻的位移量预测结果;预测监测对象未来形变趋势,可应用于地质灾害、建筑、桥梁等领域的监测及预警;提高了预测准确度,解决了传统单一位移形变预测模型无法准确描述变形和演化规律的局限性。规律的局限性。规律的局限性。
技术研发人员:杨柳 肖皇屿 马征 唐优华 刘恒
受保护的技术使用者:成都交大大数据科技有限公司
技术研发日:2021.10.15
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。