1.本发明涉及远程操控技术领域,具体涉及到一种凿岩台车操控系统及操控方法。
背景技术:
2.凿岩台车为应用于矿山巷道、铁路隧道等地下工程的一种凿岩设备,随着凿岩爆破工艺的不断发展,凿岩台车在生产建设中被广泛应用。凿岩台车的作业工法决定了其作业环境存在岩爆、涌水、粉尘等存在安全隐患地方,我国作为基建大国,国家在大力推动基础建设的同时,对安全生产尤为重视,因此对凿岩台车实现远程操控、作业员远离施工作业面、全面保障施工作业的安全显得尤为重要。
3.近年随着5g的加入,远程通讯技术得以迅猛发展,距离不再是制约远程操控技术的瓶颈,各种远程通讯技术为凿岩台车不同施工环境下的远程操控提供了技术支持。目前对于远程操控现场端信息的采集多基于平面摄像头,而凿岩台车作业的复杂性和施工环境的恶劣性,单一的平面摄像头难以为远端操作人员呈现全面的现场状况,因此为了避免由于信息不足,造成远端操作人员对施工现场把控的不够全面,从而引发远程操控不确定性的问题。
技术实现要素:
4.为了克服背景技术中存在的问题,本发明的目的在于提供一种凿岩台车操控系统及操控方法,可通过音视频采集系统将施工现场的音视频信息传输到远程操控台,在远程操控台能远程获取凿岩台车现场的音视频信号,以实现对凿岩台车的远程操控。
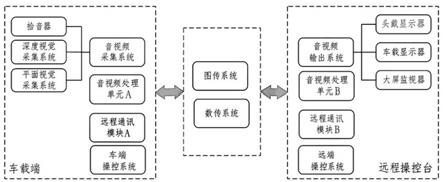
5.本发明的目的通过以下技术方案实现:第一方面,本发明提供了一种凿岩台车操控系统,包括车载端1和远程操控台2,所述车载端1包括:音视频采集系统101:用于采集凿岩台车施工现场的音频信号和视频信号;音视频处理单元a104:用于对所述音频信号和视频信号进行处理;所述远程操控台2包括:音视频处理单元b204:用于还原音视频处理单元a104处理后的音频信号和视频信号;音视频输出系统:用于输出显示音视频处理单元b204还原的音频信号及视频信号;远端操控系统:用于根据音视频输出系统显示的视频信号以及预配置的车辆参数信息提供相应的控制信号,以远程操控凿岩台车作业。
6.结合第一方面,进一步的,所述音视频采集系统101包括:拾音器1011:用于采集作业现场的音频信号;深度视觉采集系统1012:用于以立体视频的方式采集包括凿岩台车作业臂在内的作业现场深度视觉图像;
平面视觉采集系统1013:用于以平面视频的方式采集包括作业现场周围环境在内的平面视觉图像。
7.结合第一方面,进一步的,所述拾音器1011和/或深度视觉采集系统1012和/或平面视觉采集系统1013靠近车载端操作位置设置。
8.结合第一方面,进一步的,所述音视频输出系统包括:头戴显示器201:用于输出显示作业现场深度视觉图像;车载显示器205:用于接收显示车辆状态参数,以辅助远程操控台2更改车辆状态;大屏监视器206:用于输出显示作业现场深度视觉图像、平面视觉图像及车辆参数信息;所述车辆参数信息包括:车辆基本功能信息以及车载端的布孔信息图。
9.结合第一方面,进一步的,所述头戴显示器201可拆卸连接于远程操控台2的一侧;所述车载显示器205配置于远程操控台2的侧前方;所述大屏监视器206配置于远程操控台2的正前方。
10.结合第一方面,进一步的,所述车载端1和远程操控台2通过远程通讯系统通讯连接,所述远程通讯系统包括:图传系统、数传系统、远程通讯模块a102和远程通讯模块b203;远程通讯模块a102:配置于车载端1中,用于接收并传送音视频处理单元a104处理后的音频信号和视频信号;图传系统:用于将远程通讯模块a102传送的音频信号和视频信号传送至远程通讯模块b203;数传系统:用于将远程通讯模块b203传送的控制信号传送至远程通讯模块a102;远程通讯模块b203:配置于远程操控台2中,用于接收并传送远端操控系统发送的控制信号。
11.结合第一方面,进一步的,所述车载端1配置有车端操控系统103,用于近端操控凿岩台车作业。
12.结合第一方面,进一步的,所述远端操控系统模拟车端操控系统配置。
13.第二方面,本发明还提供了一种凿岩台车操控方法,由远程操控台执行,所述方法包括:采集处理后的凿岩台车施工现场的音频信号和视频信号;对所述音频信号和视频信号进行还原处理;根据还原处理后的音频信号和视频信号,结合预配置的车辆参数信息输出相应的控制信号,以远程操控凿岩台车作业。
14.结合第二方面,进一步的,所述车辆参数信息包括:车辆基本功能信息以及车载端的布孔信息图。
15.本发明的有益效果:1、本发明提供的凿岩台车操控系统配置有音视频采集系统,能够采集凿岩台车施工现场的音频信号和视频信号,音频信号和视频信号经过音视频处理单元处理成可传输的音视频信号远程传输到远程操作台,远程操控台上的操作人员能够根据所获取的音视频信号,更加准确地判断施工现场的情况,从而更加及时、准确地操控凿岩台车作业;2、音视频采集系统中包括拾音器、深度视觉采集系统及平面视觉采集系统,拾音
器实现采集施工现场的音频,传输到远程操控台,便于远端操作人员获取现场声音信息,以判断车辆信息、作业工况及突发状况的及时识别和响应;深度视觉采集系统,以立体视觉的方式采集施工现场信息,比如作业钻臂时,方便精准作业;平面视觉采集系统,采集施工现场的总体施工环境,方便远端操作人员总体把控施工现场周围环境;3、远程操控台的音视频输出系统中包括头戴显示器、车载显示器及大屏监视器,头戴显示器显示深度视觉立体成像;大屏监视器显示深度视觉系统和平面视觉系统的平面图,并同步播放音频信息;车载显示器接收显示车辆状态参数,以辅助远程操控台更改凿岩台车状态,实现对凿岩台车进行远程操控。
附图说明
16.下面结合附图对本发明作进一步的说明。
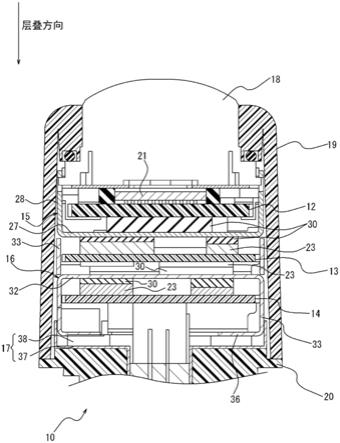
17.图1是本发明实施例提供的一种凿岩台车操控系统的电路原理框图;图2是本发明实施例提供的一种车载端的结构示意图;图3是本发明实施例提供的一种远程操控台的结构示意图;图4是本发明实施例提供的凿岩台车操控方法的流程图;图中:1、车载端;101、音视频采集系统;1011、拾音器;1012、深度视觉采集系统;1013、平面视觉采集系统;102、远程通讯模块a;103、车端操控系统;104、音视频处理单元a;2、远程操控台;201、头戴显示器;202、远程操控系统;203、远程通讯模块b;204、音视频处理单元b;205、车载显示器;206、大屏监视器。
具体实施方式
18.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
19.实施例一:如图1~3所示,一种凿岩台车操控系统,包括车载端1和远程操控台2;车载端1包括:音视频采集系统101:用于采集凿岩台车施工现场的音频信号和视频信号;音视频处理单元a104:用于对所述音频信号和视频信号进行处理;音视频采集系统101可以设置于车载端1的驾驶室顶部,驾驶室顶部高处遮挡少,方便视频系统的采集。远程操控台2包括:音视频处理单元b204:用于还原音视频处理单元a104处理后的音频信号和视频信号;音视频输出系统:用于输出显示音视频处理单元b204还原的音频信号及视频信号;远端操控系统:用于根据音视频输出系统显示的视频信号以及预配置的车辆参数信息提供相应的控制信号,以远程操控凿岩台车作业;如图1和4所示,其中,音视频采集系统101包含拾音器1011、深度视觉采集系统1012及平面视觉采集系统1013。
20.拾音器1011:用于采集作业现场的音频信号,拾音器1011为音频采集结构,深度视
觉采集系统1012为现场信息立体视觉采集结构,平面视觉采集系统1013为施工环境采集结构;深度视觉采集系统1012:用于以立体视频的方式采集包括凿岩台车作业臂在内的作业现场深度视觉图像;平面视觉采集系统1013:用于以平面视频的方式采集包括作业现场周围环境在内的平面视觉图像。
21.拾音器1011和/或深度视觉采集系统1012和/或平面视觉采集系统1013靠近车载端1操作位置设置。拾音器1011靠近车载端1操作位置安装,便于远端操作人员对于近端操作感应到的声音系统趋近,有利于通过声音信息对车辆状况的判断。如图2和4所示,其中,音视频输出系统包含头戴显示器201、车载显示器205及大屏监视器206。
22.如图1所示,其中,音视频输出系统包含:头戴显示器201:用于输出显示作业现场深度视觉图像;车载显示器205:用于接收显示车辆状态参数,以辅助远程操控台2更改车辆状态;大屏监视器206:用于输出显示作业现场深度视觉图像、平面视觉图像及车辆参数信息。所述车辆参数信息包括:车辆基本功能信息以及车载端的布孔信息图。
23.车载显示器205可以设置于远程操控台2的侧前方,方便远端操作人员监测车辆参数信息,头戴显示器201可拆装式设置于远程操控台2的另一端,头戴显示器201在远端操作人员佩戴后,可看到施工钻臂的深度视觉图像,方便远端操作人员精准作业,监测车辆参数信息。
24.如图2和4所示,其中,头戴显示器201可拆卸连接于远程操控台2的一侧;大屏监视器206配置于远程操控台2的正前方。
25.车载端1和远程操控台2通过远程通讯系统通讯连接,远程通讯系统包括:图传系统、数传系统、远程通讯模块a102和远程通讯模块b203,车载端1内部的音视频处理单元a104将采集到的音视频处理后经由远程通讯模块a102通过远程通讯系统传输至远程操控台2;远程通讯模块a102:配置于车载端1中,用于接收并传送音视频处理单元a104处理后的音频信号和视频信号;图传系统:用于将远程通讯模块a102传送的音频信号和视频信号传送至远程通讯模块b203;数传系统:用于将远程通讯模块b203传送的控制信号传送至远程通讯模块a102;远程通讯模块b203:配置于远程操控台2中,用于接收并传送远端操控系统发送的控制信号。
26.如图1
‑
3所示,其中,车载端1配置有车端操控系统:用于近端操控凿岩台车作业。远端操控系统模拟车端操控系统配置,以便远端操作人员不需要培训,可直接进行远端操作。
27.实施例二:如图3所示,本发明实施例提供一种凿岩台车操控方法,本方法可由实施例一中的远程操控台2执行,所述方法包括以下步骤:步骤一:采集处理后的凿岩台车施工现场的音频信号和视频信号;
步骤二:对音频信号和视频信号进行还原处理;步骤三:根据还原处理后的音频信号和视频信号,结合预配置的车辆参数信息输出相应的控制信号,以远程操控凿岩台车作业。
28.其中,车辆参数信息包括:车辆基本功能信息以及车载端1的布孔信息图。
29.对于步骤一中,处理后的凿岩台车施工现场的音频信号和视频信号可以由车载端提供,车载端的具体结构可以参照实施例一,具体的:、车载端1内部的音视频采集系统101中拾音器1011用于采集施工现场的音频、深度视觉采集系统1012用于以立体视觉的方式采集施工现场信息、平面视觉采集系统1013用于采集施工现场的总体施工环境等信息后,音视频处理单元a104将音视频采集系统101采集到的不同信号处理成可传输的音视频信号,利用远程通讯模块a102与远程操控台2内部的远程通讯模块b203之间进行音视频信号传导。
30.对于步骤二中所述的还原处理,可以由远程操控台中的音视频处理单元b204执行。远程操控台2内部的音视频输出系统用于输出音频信号、显示视频信号,音视频输出系统可以包含头戴显示器201显示深度视觉立体成像,大屏监视器206显示深度视觉采集系统1012和平面视觉采集系统1013的平面图,并同步播放音频信息;车载显示器205显示各项相关参数信息。工作人员能够根据还原处理后的音频信号和视频信号,结合预配置的车辆参数信息判断车辆信息、作业工况及突发状况,及时输出相应的控制信号,实现对凿岩台车的远程操控。
31.需要说明的是:本发明实施例提供的凿岩台车操控系统及操控方法,可通过音视频采集系统101将施工现场的音视频信息传输到远程操控端,在远程操作端以声音、立体视觉、平面视觉组合的显示方式全面显示凿岩台车现场的施工环境,以实现对凿岩台车的远程操控。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。