1.本发明属于航天器动力学仿真技术领域,尤其涉及一种航天器交会对接仿真方法及系统。
背景技术:
2.空间航天器自主交会对接是空间在轨服务任务的重要一环,航天器交会对接时,往往一方的重量较大,一方的重量较小,所以需要弱碰撞,从而防止发生意外,对控制提出了较高的要求,直接进行地面物理试验危险性高,容易发生事故,虽然地面可以通过6自由度气浮台进行全姿态机动控制模拟,但是姿态机动角度有限,不利于验证真实控制工况。因此需要通过模拟仿真,建立相应的动力学模型,从而对交会对接控制技术进行验证后,再进行物理试验,确保交会对接的顺利进行。
3.空间合作目标自主交会对接通常通过光学相机与相应的靶标辅助定位,因此需要仿真过程能够模拟相机对图像的采集过程;同时,对接过程中,两航天器会持续发生碰撞,从而影响对接的结果,碰撞检测与碰撞力的模拟是动力学仿真闭环的重要环节。传统的解决方案一般对其中一个环节或者分开进行仿真,并未打通从动力学仿真与控制到可视化渲染显示的仿真环境。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提供了一种航天器交会对接仿真方法及系统,能够实现航天器弱碰撞交会对接仿真,为航天器交会对接设计提供参考。
5.本发明目的通过以下技术方案予以实现:一种航天器交会对接仿真方法,所述方法包括如下步骤:步骤s1:建立地月日空间场景模型;步骤s2:建立远场近场相机模型;步骤s3:建立姿轨动力学模型;步骤s4:建立交会对接碰撞动力学模型;步骤s5:根据地月日空间场景模型、远场近场相机模型、姿轨动力学模型和交会对接碰撞动力学模型构建交会对接仿真系统。
6.上述航天器交会对接仿真方法中,在步骤s1中,建立地月日空间场景模型包括如下步骤:步骤s11:根据数学仿真系统时间,将时间转换到基准历元时间起算的儒略时;步骤s12:以步骤s11中儒略时为参数根,以de404星历表中天体基本数据为参数,根据天体计算模型进行岁差改正、自行改正、章动改正和光行差改正,得到天体在第二赤道坐标系下的赤经和赤纬,将赤经和赤纬经空间转换成相对于地球所在空间直角坐标系中的视位置即天体三维坐标;步骤s13:用步骤s12中天体三维坐标驱动以地球为中心的场景目标运动,采用高清星球表面照片对星球进行贴图渲染处理得到地月日空间场景模型。
7.上述航天器交会对接仿真方法中,在步骤s2中,建立远场近场相机模型包括如下步骤:基于opengl虚拟相机来模拟航天器上的远场和近场相机传感器,生成空间交会目标的天基观测图像,从而作为交会对接控制器的输入;利用截锥体来确定虚拟相机的观测视场,并采用平头椎体来模拟真实光学系统中的透视投影,通过坐标转换,将空间目标的三维
模型从对象坐标系中转换到窗口坐标系,从而得到了模型的空间位置与图像像素位置之间的映射关系。
8.上述航天器交会对接仿真方法中,在步骤s4中,建立交会对接碰撞动力学模型包括如下步骤:步骤s41:将预设交会对接航天器的对接机构的机械设计三维cad模型进行简化得到不同粒度的机构表面片元模型;步骤s42:对步骤s41的机构表面片元模型进行碰撞检测,从而得到捕获机构和被捕获机构两个复杂机械结构的碰撞点位置及嵌入深度量;步骤s43:采用建立在弹性理论基础上的赫兹接触力模型,根据步骤s42中的碰撞点位置及嵌入深度量,施加一个和嵌入深度量成函数关系的抵抗力作用在碰撞点位置上,同时根据作用力和反作用力原理,也在另外一侧的面上施加一个大小相等方向相反的力;步骤s44:根据库伦摩擦计算接触摩擦力。
9.上述航天器交会对接仿真方法中,在步骤s41中,简化原则为不影响两体的质量惯量及碰撞特性。
10.上述航天器交会对接仿真方法中,在步骤s41中,对对接机构的表面进行三角片元化,根据预设仿真精度要求得到不同粒度的机构表面片元模型;
11.上述航天器交会对接仿真方法中,在步骤s42中,对步骤s41的机构表面片元模型采用沿坐标轴的包围盒aabb算法对捕获机构和被捕获机构进行碰撞检测。
12.上述航天器交会对接仿真方法中,在步骤s43中,在赫兹接触力模型中,将接触过程中存在的能量消耗视为材料阻尼引起,则碰撞力f
c
为:
[0013][0014]
其中,k
c
为接触碰撞刚度系数,c
c
为接触碰撞阻尼系数,δ为嵌入深度量,为侵入速度,n为碰撞法向方向。
[0015]
上述航天器交会对接仿真方法中,在步骤s44中,接触摩擦力f
t
为:
[0016]
f
t
=μ(|v
t
|)f
c
;
[0017]
其中,μ为摩擦系数,v
t
为切向相对速度,f
c
为碰撞力的值。
[0018]
一种航天器交会对接仿真系统,包括:第一模块,用于建立地月日空间场景模型;第二模块,用于建立远场近场相机模型;第三模块,用于建立姿轨动力学模型;第四模块,用于建立交会对接碰撞动力学模型;第五模块,用于根据地月日空间场景模型、远场近场相机模型、姿轨动力学模型和交会对接碰撞动力学模型构建交会对接仿真系统。
[0019]
本发明与现有技术相比具有如下有益效果:
[0020]
(1)本发明能够通过模拟仿真交会对接过程,实现对交会对接控制算法的验证,从而降低了地面物理试验的风险。
[0021]
(2)本发明能够验证传感器、空间环境以及航天器故障等影响,具有比地面物理试验更大的灵活度。
[0022]
(3)本发明具有模拟效果逼真、使用简便灵活、适用范围广的特点,可广泛应用于空间交会对接试验与仿真,具有良好的市场推广前景。
附图说明
[0023]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明
的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0024]
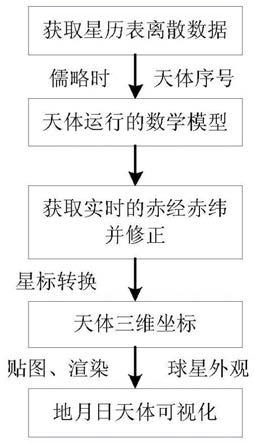
图1是本发明实施例提供的地月日可视化流程图;
[0025]
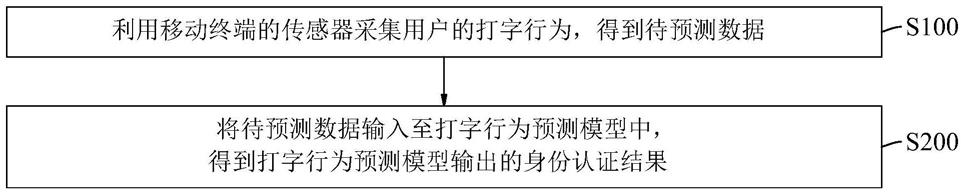
图2是本发明实施例提供的航天器交会对接仿真方法的流程图;
[0026]
图3是本发明实施例提供的日地月空间仿真场景渲染图。
具体实施方式
[0027]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0028]
本实施例提供了一种航天器交会对接仿真方法,具体方法如下:
[0029]
(1)地月日空间场景建模:基于jpl实验室的星历建立地球、月球、太阳及星系的运行状态,模拟轨道器与月球上升器的交会对接空间场景。建模流程如图1所示,包括:
[0030]
(11)根据数学仿真系统时间,将时间转换到基准历元时间起算的儒略时;
[0031]
(12)然后以步骤(11)中儒略时为参数根,以de404星历表中天体基本数据为参数,根据天体计算模型进行岁差改正、自行改正、章动改正和光行差改正,由此得到天体在第二赤道坐标系下的赤经和赤纬,此坐标经空间转换成相对于地球所在空间直角坐标系中的视位置,即天体三维坐标。
[0032]
(13)用步骤(12)中天体三维坐标信息驱动以地球为中心的场景目标运动,采用高清星球表面照片对星球进行贴图渲染处理,实现逼真的显示效果完成地月日空间场景的三维可视化。
[0033]
地月日空间场景的渲染效果如图3所示。需要理解的是,因为图3为渲染图,根据需要图3为有颜色的。
[0034]
(2)远场近场相机建模:基于opengl虚拟相机来模拟航天器上的远场和近场相机传感器,生成空间交会目标的天基观测图像,从而作为交会对接控制器的输入。利用截锥体来确定虚拟相机的观测视场,并采用平头椎体来模拟真实光学系统中的透视投影,通过坐标转换,将空间目标的三维模型从对象坐标系中转换到窗口坐标系,从而得到了模型的空间位置与图像像素位置之间的映射关系。
[0035]
(3)姿轨动力学建模:因为交会对接过程主要作用力为碰撞力,因此忽略航天器上的柔性附件,按照刚体动力学和轨道动力学原理对航天器姿轨动力学特征进行建模,模拟航天器在轨道的真实运动状态。
[0036]
(4)建立交会对接碰撞动力学模型,实时计算交会对接仿真中的捕获对接过程的碰撞力和接触摩擦力,并驱动场景中航天器的运动。建模流程如下:
[0037]
(41)将交会对接航天器的对接机构的机械设计三维cad模型进行简化,从而提高碰撞检测的效率,简化原则为不影响两体的质量惯量及碰撞特性。用三角面片可以逼近实体的复杂几何体外形,因此,对对接机构的表面进行三角片元化,根据仿真精度要求得到不同粒度的机构表面片元模型,用于碰撞检测。
[0038]
(42)对步骤(41)所得的片元模型采用沿坐标轴的包围盒aabb算法对捕获机构和
被捕获机构进行碰撞检测,这种包围盒有较好的紧密性和包围盒计算简单的优点,从而得到两个复杂机械结构的碰撞点位置及嵌入深度量。
[0039]
(43)根据步骤(42)中检测信息,施加一个和侵入量成函数关系的抵抗力作用在发生侵入的点上,同时根据作用力和反作用力原理,也在另外一侧的面上施加一个大小相等方向相反的力,相当于在所有检测几何体之间放置法向弹簧。采用建立在弹性理论基础上的赫兹接触力模型,将接触过程中存在的能量消耗视为材料阻尼引起,则碰撞力f
c
为:
[0040][0041]
式中:k
c
为接触碰撞刚度系数,c
c
为接触碰撞阻尼系数,δ为侵入深度,为侵入速度,n为碰撞法向方向。
[0042]
(44)根据库伦摩擦计算接触摩擦力f
t
:
[0043]
f
t
=μ(|v
t
|)f
c
[0044]
其中,μ为摩擦系数,由切向相对速度v
t
决定:
[0045]
(5)仿真系统建模:仿真系统采用c 语言开发,系统组成包括:碰撞模块,负责对模型碰撞检测及碰撞力计算;姿轨动力学模块,负责空间轨道推演与计算;执行机构模块,负责模拟控制力或力矩;传感器模块,负责模拟星上相机传感器;可视化模块,负责模拟地日及星系、捕获装置和被捕获装置及交会对接过程状态数据。实现交会对接过程中控制器、传感器、故障以及空间环境的验证。其中可视化模块在步骤(1)的基础上,采用osg开发,osg是一种快速可靠的图形开发环境,并有着标准的图形接口规范,可以满足交会对接仿真系统的实时可靠的图形显示要求。而且,可接受cad软件的零件图作为模型源,从而方便得了实现交会对接航天器机构的真实显示;传感器模块基于步骤(2)进行开发;碰撞模块在步骤(4)的基础上采用bullet开发,bullet是一个跨平台的物理模拟计算引擎,可以实现复杂的物理模拟计算,能够满足交会对接碰撞检测的要求;因为交会对接过程主要作用力为碰撞力,因此忽略航天器上的柔性附件,按照步骤(3)对轨道动力学模块和执行机构模块进行开发。
[0046]
(6)仿真流程如图2所示,首先初始动力学仿真参数与可视化场景,通过捕获航天器上的远近场相机获取目标航天器的靶标信息,经过处理后获得两航天器的相对位姿,然后作为交会对接控制器的输入,生成执行器的控制指令,航天器对象在轨道动力学、执行力以及碰撞力的共同下进行交会对接动力学仿真,从而实现交会对接过程中控制器、传感器、故障以及空间环境的验证。
[0047]
本实施例还提供了一种航天器交会对接仿真系统,包括:第一模块,用于建立地月日空间场景模型;第二模块,用于建立远场近场相机模型;第三模块,用于建立姿轨动力学模型;第四模块,用于建立交会对接碰撞动力学模型;第五模块,用于根据地月日空间场景模型、远场近场相机模型、姿轨动力学模型和交会对接碰撞动力学模型构建交会对接仿真系统。
[0048]
本发明能够通过模拟仿真交会对接过程,实现对交会对接控制算法的验证,从而降低了地面物理试验的风险;本发明能够验证传感器、空间环境以及航天器故障等影响,具有比地面物理试验更大的灵活度;本发明具有模拟效果逼真、使用简便灵活、适用范围广的特点,可广泛应用于空间交会对接试验与仿真,具有良好的市场推广前景。
[0049]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域
技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。