1.本公开的示例总体上涉及消毒设备,例如可以用于对诸如商用飞机的交通工具内的结构和区域消毒,并且更具体地涉及用于使用紫外(uv)光对结构和区域自动或半自动消毒的移动设备。
背景技术:
2.诸如商用飞机的交通工具用于在各个位置之间运送乘客。当前正在开发用于例如使用uv光对飞机内的表面进行杀菌或以其他方式消毒的系统。为了对结构的表面消毒,已知的uv光消毒方法将广谱uvc光发射到结构上。
3.正在开发用于对部件消毒的具有棒组件的便携式消毒系统。便携式消毒系统的棒组件包括被构造为发射uv光的uv灯。通常,操作员在部件的表面上移动棒组件,以对表面消毒。然而,个人通常不知道棒组件被移动得太快还是太慢以至于不能有效且高效地对表面消毒。通常,使用手持装置对表面消毒的手动过程具有不同程度的一致性。
4.正在开发可以沿着诸如飞机内的内部舱的过道的路径滚动或以其他方式移动并在设备移动时向结构表面发射uv光的移动消毒设备。然而,已知的移动消毒设备具有有限的杀菌效果和一致性,这是因为当设备沿着路径移动时,uv光被悬挂在相对于被uv光照射的结构的固定高度处。结果是uv光可能定位得距结构表面相对远,并且uv光与结构表面之间的距离可能会发生变化。目标表面上的杀菌或消毒的量被称为剂量,并受uv光的功率、从uv光源到目标表面的范围或距离以及曝光时间的影响。设备相对于目标表面的速度会影响曝光时间。由于从固定的uv光源到不同表面的距离不同,因此施加到不同表面的剂量也会发生变化,导致消毒效果不一致。此外,从uv光源到一些表面的相对远的距离以及缺乏将uv光对准表面的能力可能导致施加到表面的uv光的剂量不足。增大剂量以达到期望的杀菌量的一种方法是显著降低移动消毒设备的速度,以增加曝光时间,但是这会使消毒过程效率降低。
技术实现要素:
5.需要一种自动或半自动的移动式uv消毒设备,所述uv消毒设备可以在设备移动时一致且高效地对结构和区域进行杀菌。
6.考虑到这一需要,本公开的特定示例提供一种紫外(uv)光消毒推车,其包括:一个或多个第一uv灯,被构造为发射uv光;一个或多个棒组件,包括被构造为发射uv光的一个或多个第二uv灯。所述一个或多个棒组件在收起位置和展开位置之间是能移动的。
7.在至少一个示例中,uv光消毒推车还包括具有移动基座的主体。所述一个或多个第一uv灯固定至所述主体的一个或多个部分。作为另一示例,所述一个或多个棒组件通过一个或多个系绳连接到所述主体。所述一个或多个系绳可以包括电源线、电缆和空气软管中的一个或多个。
8.在至少一个示例中,所述uv光消毒推车是被构造为移入和移出交通工具的内部舱
的厨房内的隔室的厨房推车。
9.在至少一个示例中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射远uv光谱内的波长的uv光。例如,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射222nm波长的uv光。
10.在至少另一个示例中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射uvc光谱内的波长的uv光。例如,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射254nm波长的uv光。
11.在至少一个示例中,所述一个或多个棒组件包括第一棒组件和第二棒组件。
12.在至少一个示例中,所述一个或多个棒组件包括:手柄;以及消毒头,联接到手柄。所述消毒头包括所述一个或多个第二uv灯。作为另一示例,所述消毒头可移动地联接至手柄。
13.本公开的特定示例提供了一种紫外(uv)光消毒方法,所述紫外光消毒方法包括:在uv光消毒推车上或内设置一个或多个第一uv灯;在所述uv光消毒推车上或内设置包括一个或多个第二uv灯的一个或多个棒组件;在收起位置和展开位置之间移动所述一个或多个棒组件。
附图说明
14.图1是根据本公开的示例的包括uv光消毒推车的交通工具的内部舱的后视图或朝后视图。
15.图2是包括uv光消毒推车的交通工具的内部舱的侧视图或外侧视图。
16.图3是根据本公开的示例的内部舱中的uv光消毒推车的透视图。
17.图4示出了根据本公开的示例的内部舱中的两排座椅的侧视图或外侧视图,并且示出了uv光消毒推车的uv光阵列随时间的运动路径。
18.图5是根据本公开的示例的uv光消毒推车的示意图。
19.图6是根据本公开的示例的具有抬起和伸出的臂的uv光消毒推车的后视图。
20.图7是根据本公开的示例的被收起在内部舱内的立体空间内的uv光消毒推车的示图。
21.图8示出了根据本公开的示例的用于升高和降低uv光消毒推车的臂以及因此升高和降低uv光阵列的弯曲的齿条和小齿轮致动器。
22.图9示出了根据本公开的示例的用于升高和降低uv光消毒推车的臂以及因此升高和降低uv光阵列的线性致动器。
23.图10是根据本公开的示例的uv光消毒推车的俯视图。
24.图11是根据本公开的示例的uv光消毒推车的臂中的一个的内部构件和外部构件的截面图。
25.图12a示出了相对于内部构件延伸的臂的外部构件。
26.图12b示出了相对于内部构件缩回的外部构件。
27.图13示出了用于控制外部构件相对于内部构件的延伸的齿条和小齿轮或齿轮驱动的致动器。
28.图14a
‑
e示出了根据另一示例的uv光消毒推车的臂相对于其主干的各种姿势,其
中臂的外部构件可以相对于内部构件枢转。
29.图15示出了根据本公开的示例的被安装到uv光消毒推车的臂的内部构件的外部阵列承载件。
30.图16描绘了根据本公开的示例的用于控制uv光消毒推车的车轮的位置的转向机构。
31.图17示出了图16中所示的转向机构的车轮承载件组件。
32.图18示出了作为图16和图17中所示的转向机构的替代方案的用于使uv光消毒推车转向的齿条和小齿轮机构。
33.图19示出了根据本公开的示例的相对于主干成角度的uv光消毒推车的承载件。
34.图20描绘了根据本公开的示例的可以用于使承载件围绕竖直轴线旋转的致动器。
35.图21a示出了处于第一高度的uv光消毒推车。
36.图21b示出了由于主干的延伸而处于高于第一高度的第二高度处的uv光消毒推车。
37.图21c描绘了根据本公开的示例的用于延伸和缩回主干的齿条和小齿轮致动器的侧视图和俯视图。
38.图22描绘了根据本公开的替代示例的uv光消毒推车的基座。
39.图23示出了根据本公开的替代示例的uv光消毒推车的主干。
40.图24示出了根据本公开的示例的uv光消毒推车的透视前视图。
41.图25示出了根据本公开的示例的在交通工具的内部舱内的uv光消毒推车的透视图。
42.图26示出了图24的uv光消毒推车的侧视图。
43.图27示出了图24的uv光消毒推车的俯视图。
44.图28示出了根据本公开的示例的uv光消毒推车的俯视图。
45.图29示出了根据本公开的示例的具有处于收起位置的棒组件的uv光消毒推车的透视前视图。
46.图30示出了根据公开的示例的具有处于展开位置的棒组件的uv光消毒推车的透视前视图。
47.图31示出了根据本公开的示例的棒组件的透视侧向俯视图。
48.图32示出了图31的棒组件的透视后视图。
49.图33示出了图31的棒组件的透视侧视图。
50.图34示出了根据本公开的示例的消毒头的uv灯和反射器的透视端视图。
51.图35示出了根据本公开的示例的消毒头的uv灯和反射器的透视端视图。
52.图36示出了根据本公开的示例的消毒头的uv灯和反射器的透视端视图。
53.图37示出了紫外光光谱。
54.图38示出了根据本公开的示例的内部舱内的厨房的透视图。
55.图39示出了根据本公开的示例的uv光消毒方法的流程图。
具体实施方式
56.当结合附图阅读时,将更好地理解前述发明内容以及特定示例的以下详细描述。
如本文中所使用的,以单数形式陈述并且词语“一”或“一个”在前的元件或步骤应被理解为不必然排除多个元件或步骤。此外,对“一个示例”的引用无意被解释为排除也包含所述特征的附加示例的存在。此外,除非有明确的相反说明,否则“包括”或“具有”具有特定条件的一个或多个元素的示例可以包括不具有该条件的其他元素。
57.本公开的特定示例提供一种紫外(uv)光消毒推车,所述紫外光消毒推车随着推车在区域内移动发射uv光。推车包括发射uv光的uv光源阵列。本文所指的uv光源或灯可以发射中和(例如,杀死)微生物的一个或多个波长的远uv光光谱中的光。本文所指的微生物可以包括病毒和细菌。uv灯发射的uv光的波长在与人接触时可能不会造成任何风险,例如222nm。uv灯可以是准分子灯。可选地,uv光源可以发射诸如在uvc光谱内的其他波长的uv光。
58.在至少一个示例中,包括附加的uv光源的棒组件联接到uv光消毒推车。棒组件在推车上或推车内的收起位置与展开位置之间是可移动的,在所述展开位置,棒组件能够到达推车否则可能无法到达的区域。
59.uv光消毒推车可用在交通工具的内部舱内,以对内部舱内的结构、墙壁、地板、天花板等的表面消毒和杀菌。该结构可以包括座椅、存储容器或储物箱、桌子等。与诸如使用uv棒进行手动消毒并推动具有固定在位的uv光源的移动设备的某些已知的uv系统相比,本文公开的主题的示例提供更安全、更有效和更高效的卫生条件。
60.作为示例,棒组件是手持式uv棒,其诸如通过电力线或电源线和冷却空气软管附接到uv消毒推车。uv棒从uv消毒推车接收电力。手持棒提供附加的消毒装置。uv棒可以操作为诸如在200nm至320nm之间的任何杀菌uv波段。在至少一个示例中,uv棒包括uv灯,所述uv灯被构造为发射波长在200nm至230nm的光谱带内的对人体组织无害的uv光。在至少一个实施方式中,uv灯被构造为发射波长为222nm的uv光,所述uv光消除或减少部件的表面上的病原体,并且对人类乘员没有危害。
61.包括联接到推车的棒组件的uv消毒系统可以按设定的定期时间表连续运行,或者也可以根据需要打开。系统的电力可以通过电池和/或连接至机外电源的电力线提供。
62.uv棒附件(即,联接到推车的棒组件)允许一个或多个个人对可能被遮挡的区域或主要的uv推车uv光可能未充分进行杀菌的区域进行杀菌。可以使手持式uv棒非常靠近表面,并相对于表面期望地定向。这允许棒组件对不能被推车的其他uv光源杀菌的表面进行照射并杀菌。
63.图1是根据示例的包括uv光消毒系统或推车100的交通工具104的内部舱102的后视图或朝后视图。图2是包括uv光消毒推车100的交通工具104的内部舱102的侧视图或外侧视图。内部舱102沿着纵向轴线或x轴110、横向轴线或y轴111以及竖直(例如高度)轴线或z轴112定向。轴线110
‑
112相互垂直。内部舱102通过交通工具104的地板114、天花板116和侧壁118限定。内部舱102具有用于乘客的多个座椅120。座椅120被布置成两个组122、124,其通过过道126彼此间隔开。过道126沿着纵向轴线110延伸。每个组122、124包括沿着内部舱102的长度间隔开的以多个排128布置的座椅120。每个排128平行于横向轴线111定向。舱102还包括安装在座椅120上方的储物箱130,以用于存储诸如行李、箱包、夹克等的个人物品。储物箱130可被固定到天花板116和/或侧壁118。uv光消毒推车100能操作为对内部舱102内的表面高效、有效且一致地消毒和杀菌,包括例如座椅120、储物箱130、地板114、侧壁
118和/或天花板116。
64.在非限制性示例中,交通工具104是诸如商用客机的飞机,内部舱102是乘客舱。在另一个示例中,交通工具104可以是另一类型的交通工具,诸如基于铁路的客运火车、公共汽车等。uv光消毒推车100可以可选地用于对交通工具外部的诸如建筑物中的其他封闭区域消毒。例如,推车100可以用于对办公楼、剧院、饭店、礼拜场所等进行消毒。
65.uv光消毒系统或推车100包括具有移动基座132和多个互连的刚性构件133的主体131。刚性构件133支撑在基座132上。主体131的刚性构件133可以包括例如联接到基座132的直立构件或主干134和从主干134延伸的臂136。刚性构件133还可以包括诸如手柄146、承载件214(本文中参照图6更详细地描述的)等的附加部件。推车100包括通过多个uv灯140限定的uv光阵列138。阵列138中的uv灯140中的至少一些安装到臂136。臂136是可致动的,以从主干134延伸以及朝向所述主干缩回。在图1和图2中示出了臂136处于伸出位置,所述伸出位置是在操作以对内部舱102的表面进行杀菌时所利用的位置。处于伸出位置的臂136平行于横向轴线111伸长。臂136的延伸长度可以基于舱102内的空间和待杀菌的期望表面来控制。例如,在所示的舱102中,每个排128中总共有六个座椅120,每个组122、124中有三个相邻的座椅120。第一臂136a跨过第一组122中的三个座椅120延伸,第二臂136b跨过第二组122中的三个座椅120上延伸。设置在第一臂136a上的uv灯140将uv光发射在第一组122中的三个座椅120的表面上,设置在第二臂136b上的uv灯140照射第二组124中的三个座椅120的表面。因此,在图1和图2中所示的推车100在舱102内的位置中,推车100同时对排128中的所有六个座椅120消毒。推车100沿着推车路径141移动,诸如沿着推车路径向前和向后移动,以在平行于推车路径141的方向上平移uv光阵列138。在所示的示例中,环境是内部舱102,推车路径141通过过道126表示。推车100沿着过道126的长度移动,以一次对每个排128进行消毒。
66.在所示的示例中,基座132包括多个车轮142,所述多个车轮提供移动性并使推车100能够沿着诸如过道126的路径的长度滚动。在所示的示例中,基座132具有四个车轮142。可替换地,代替车轮142的表面,基座132可以包括连续的轨道,所述轨道具有与地板114接合的胎面带。基座132可以支撑推车100的诸如一个或多个电池组144的附加部件。
67.主干134从基座132延伸并沿着竖直(或高度)轴线112定向。手柄146联接到主干134。如图2中所示,手柄146提供使操作员能够物理地抓握推车100并控制其运动的接口。在所示的示例中,推车100被操作员推动或拉动,使得推车100以半自动模式操作。如本文中更详细描述的,半自动模式依赖于操作员沿着过道126推动推车100,但是可以提供各种自动化任务,例如包括uv光阵列138和臂136沿着座椅120的轮廓的地形跟随,并且控制向操作员的反馈,所述反馈指示操作员是否应该改变推车100沿着过道126的运动的速度或方向以增强消毒效果。在自动模式下,包括推车100沿着过道126的运动在内的所有操作是自动化的。例如,如本文所述,操作员可以使用输入装置选择性地唤醒或打开推车100,从而触发推车100进行对内部舱102的消毒,然后返回到收起位置。当在示例中推车100可以仅在自动模式下操作时,手柄146是可选的。
68.如本文中所述,uv光消毒系统或推车100还包括棒组件,所述棒组件联接(诸如,可移动地固定)到uv光消毒系统或推车的一部分。例如,棒组件联接到基座132,并且被构造为相对于基座132在收起位置和展开位置之间移动。
69.图3是根据示例的内部舱102中的uv光消毒推车100的透视图。图3中的推车100设置在过道126中,并且第一臂136a在单个(第一)排128a中在座椅120的第一组122的三个座椅120上方延伸。在图3中省略了手柄146。图4示出了根据示例的座椅120的两个排128的侧视图或外侧视图,并且示出了uv光消毒推车100的uv光阵列138随时间的运动路径。两排包括图3中所示的座椅120的第一排128a以及在第一排128a前面的座椅120的排128b。图3和图4示出了uv光消毒推车100的地形跟随能力,其实现了对舱102中的各个表面的有效、高效和一致的杀菌。在图3中所示的位置,臂136a设置在座椅120的头枕150上方,设置在臂136a上的uv灯140(图1中所示)将uv光发射到头枕150的顶部上。
70.参照图3,uv光消毒推车100可以相对于内部舱102中的座椅120和其他结构平移和旋转uv光阵列138(图1中所示)中的uv灯140,以在结构的表面的指定接近度内发射uv光。指定接近度可以是几英寸,诸如2英寸、4英寸等。在所示的示例中,推车100通过使推车100沿着过道126移动而使uv灯140沿着纵向轴线或x轴110移动。例如,在自动模式下,车轮142推进以驱动推车100。在半自动模式下,推车100可以指示操作员如何推动或拉动推车100,例如通过提供关于沿着纵向轴线110的运动的速度和方向的反馈。臂136沿着竖直轴线或z轴112是可平移的,以控制uv灯相对于座椅120和其他结构的表面的高度。例如,主干134可以是伸缩的,以机械地升高和降低臂136。臂136可以绕横向轴线或y轴111是可旋转的,以使uv光对准朝向座椅120和其他结构的表面。
71.现在参考图4,第一臂136a在图3中所示的位置中的当前位置通过实线矩形152指示,所述实线矩形在第一排128a中设置在座椅120的头枕150的顶部151上方。通过所示的在臂136a上的uv灯140发射的uv光照射头枕150的顶部151。图4示出了根据示例的第一臂136a随时间的清洁路径160。虚线矩形162表示当推车100沿着清洁路径160移动臂136a时第一臂136a在随后时间的位置。例如,在对头枕150的顶部151消毒之后,第一臂136a沿着清洁路径160移动到位置162a,在所述位置处,uv光从uv灯140发射到头枕150的前部155上。尽管在图4中每排仅示出一个座椅120,但是认识到的是,图3中所示的方框中的所有三个座椅120可以在座椅120的相同的相应表面上同时接收uv光。此外,尽管在不同位置示出了若干虚线矩形162,但是在示例中,uv光沿着清洁路径160的整个长度从臂136a连续发射。所示的虚线矩形162不表示发射uv光的唯一位置。
72.第一臂136a(及其上的uv灯140)的清洁路径160沿着(方框中的每个座椅120的)座椅靠背158的前部157延伸至座椅底部165的顶部164,然后沿着座椅底部165的前部166延伸。uv光随后在座椅120下方发射,然后朝向两个排128a、128b之间的地板114发射。然后,臂136a移动以使uv灯140在下个排128b中的座椅120下方发射uv光,然后将uv光从每个座椅120的底部168朝向头枕150的顶部151发射到(方框中的每个座椅120的)座椅靠背158的后部167上。
73.臂136a沿着清洁路径160的运动是自动的或至少是半自动的。在示例中,在半自动模式下接收手动输入的唯一运动是沿着纵向轴线110的运动。推车100能够提供复合运动,这是指沿着多个轴线和/或铰接点的同时运动。例如,为了完成从图4中的152指示的位置到位置162a的过渡,保持uv灯140的臂136a沿着纵向轴线110在向前的方向170(图3中所示)上移动,沿着竖直轴线112在向下的方向172(图3)上降低,并绕着横向轴线111在逆时针方向174(图3)上旋转。可以同时执行这些运动,以使臂136a能够沿着头枕150的轮廓扫动。在所
示的示例中,可以通过向前驱动整个推车100来实现在向前的方向170上的运动,但是替代地,可以通过相对于基座132致动主干134和/或臂136a以使得推车100保持在过道126上的固定位置来实现。为了使臂136a沿着清洁路径160达到其他位置,臂136a可以沿着纵向轴线110在向后或向后的方向171上移动,沿着竖直轴线111在向上的方向173上移动,以及绕着横向轴线111在顺时针方向175上移动。虽然在图3中未示出,但是推车100也能够沿着如本文中所述的其他平面和旋转轴线移动臂136。
74.清洁路径160描绘出舱102中存在的座椅120和其他结构的轮廓。在示例中,清洁路径160被设计为允许uv灯140处于用于提供有效且高效的uv光的剂量的距表面的指定或预定的接近度或范围内。例如,通过将uv灯140控制在表面的几英寸之内,可以施加指定的剂量而无需大量的uv光功率或曝光时间。限制功率需求是节能的,并且限制曝光时间相对于时间是有效的。例如,通过发射更靠近目标表面的uv光,推车100可以以比已知系统更少的时间和功率消耗来提供对舱102的一致且有效的杀菌。此外,与使用大约相同量的功率和/或时间进行清洁的已知系统相比,因为从uv灯到目标表面的范围较小,所以通过推车100施加到表面的uv剂量可能更大,因此在中和微生物方面更有效。
75.可选地,图4中所示的清洁路径160可以是uv光消毒推车100沿着过道126的长度在诸如向前的方向170的一个方向上遵循的第一路径。然后,当推车100沿着过道126在相反的向后方向171上移动时,uv光消毒推车100则可以遵循第二清洁路径180。第二清洁路径180遵循座椅120上方的天花板116和/或储物箱130的轮廓。uv光向上发射到天花板116和/或储物箱130上,而不是向下发射到座椅120和地板114上。在非限制性示例中,通过简单地使推车100向下移动过道126的长度,然后返回到在初始位置,推车100可以对结构、墙壁、地板等的表面进行消毒。
76.图5是根据示例的uv光消毒推车100的示意图。消毒推车100包括表示阵列138(图1中所示)的uv灯140、控制单元190、电源192、传感器194、致动器196和输出装置198。致动器196是指产生推车100的诸如车轮142的旋转、主干(或支撑构件)134和臂136的延伸和缩回、臂136的相对于主干134的旋转等的自动运动的机械致动器、电机和驱动系统。
77.电源192向uv灯140提供电能以为uv光的产生提供动力。电源192还向致动器196、控制单元190、传感器194和输出装置198提供电力。各种导电线和/或电缆可以将电力从电源192传导至uv灯140、致动器196、控制单元190、传感器194和输出装置198。电源192可以包括或表示任何机载能量储存装置或发电部件,包括但不限于图1和图2中所示的电池144。电源192还可以包括电容器、光伏电池等。可选地,电源192可以是电力电缆,其插入到设置在推车100外的电源中,诸如包括内部舱102的交通工具104(或建筑物)的电气系统中。电缆能够延伸内部舱102的整个长度,以使推车100能够对整个舱102进行消毒,而无需将电缆从插座中移除以插入到另一插座中。在另一示例中,电源192可以是在推车100外且与交通工具104分离的发电机或电气储存装置。例如,电源192可以设置在由操作员携带的背包中或可以设置在与uv光消毒推车100相连的侧推车上。
78.在至少一个实施方式中,uv灯140中的至少一个在棒组件上或棒组件内。例如,包括至少一个uv灯140的棒组件联接到uv光消毒推车100的一部分,诸如联接到图1和图2中所示的主体131。
79.控制单元190经由有线和/或无线通信路径可操作地连接到uv灯140、致动器196、
传感器194和输出装置198。控制单元190产生控制信号,所述控制信号控制uv灯140的诸如开/关状态的操作、所产生的uv光的幅度或功率输出,以及可选地还控制uv光的波长。控制单元190还产生用于控制致动器196和输出装置198的控制信号。这些控制信号可以基于从传感器194接收的传感器信号来产生。控制单元190表示包括和/或连接有一个或多个处理器197(例如,一个或多个微处理器、集成电路、微控制器、现场可编程门阵列等)的硬件电路。控制单元190包括和/或连接有有形且非暂时性的计算机可读存储介质(例如,存储器)199。例如,存储器199可以存储通过一个或多个处理器197来执行的编程指令(例如,软件),以执行本文中所述的控制单元190的操作。
80.传感器194可以包括接近传感器、视觉传感器等。传感器194可以利用超声、相机(例如,在视觉和/或红外波长范围内)、光学范围感测(例如,光检测和测距(lidar))等。传感器194用于避开物体,以防止推车100与舱102中的物体和结构之间发生碰撞。在特定示例中,传感器194还用于空间识别,以沿着图4中所示的清洁路径160、180方向引导带有uv灯140的臂136。例如,传感器194可以被控制单元190使用,以确定推车100和/或其部件相对于内部舱102的当前位置。
81.在一个非限制性示例中,存储器199存储内部舱102内的环境的地图。该地图可以是三维的,并且可以具有坐标系。例如,座椅120的所有排128在地图内具有已知坐标。此外,清洁路径160、180可以是地图的坐标系内的预编程路线。处于自动模式的控制单元190可以移动到或保持在舱102内的指定参考位置。推车100的运动可以通过控制单元190基于诸如齿轮、连杆、致动器196等的机械元件来追踪。通过以参考位置开始,然后追踪从参考位置开始的后续运动,控制单元190可以将物理空间中的运动与3d地图的虚拟空间中的相应运动相关联或配准。例如,控制单元190可以基于查阅3d地图并从参考位置追踪推车100的运动来确定推车100在舱102中的当前位置。推车100的运动可以通过监测指示运动方向的车轮142的定位并监测车轮142(或相关部件)的旋转来部分地追踪。可以通过具有3d地图的控制单元190来利用经由各种致动器196和控制臂136的运动的其他机械元件对臂136的相似跟踪,使控制单元190能够控制图4中所示和所述的地形跟随。在基于舱102的存储地图控制uv阵列138的运动的示例中,传感器194用于避开物体。例如,传感器信号可以指示何时应执行对地图的修改以避开在地图中未考虑的物体,诸如留在座椅上的包等。
82.在另一示例中,传感器194可以用于指导推车100的运动,而不是使用地图。例如,控制单元190可以是基于视觉的系统。传感器194可以向控制单元190提供图像数据、范围数据等。一个或多个处理器197可以分析传感器数据并执行对象检测,诸如以识别图像数据中的座椅120。基于所识别的座椅以及基于传感器数据的到座椅的距离,控制单元190产生控制信号,以控制臂136如图4中所示的清洁路径160、180所显示地接近座椅120的表面并沿着该表面移动。
83.输出装置198可以包括或表示用于向附近人员提供警报和通知的灯、扬声器、显示屏、振动包等。例如,当推车100以自动模式操作时,输出装置198可以具有闪光灯和/或发出蜂鸣声,以警告推车100附近的人员推车100正在移动。当处于存在人类操作员的半自动模式时,输出装置198可以用于指示或修改操作员的运动,以用于提高消毒过程的有效性、效率和/或一致性的目的。例如,可以存在推车100沿着过道126移动以产生有利或令人满意的杀菌性能的指定速度或速度范围,其部分地基于uv光在目标表面上的曝光时间。可以使用
以下中的一种或多种方式将推车100的相对于指定速度的实际速度告知操作员:推车100上的步速(pacing)灯,其根据速度是否恰当、太快或太慢而以不同的颜色和闪烁率来点亮;手柄146,根据速度是否恰当、太快或太慢而以不同的频率和/或强度振动;和/或音频音调,根据速度是否恰当、太快或太慢而改变声音和脉冲率。
84.图6是根据示例的臂136被升高和延伸的uv光消毒推车100的后视图。在臂136延伸的情况下,uv光阵列138沿着阵列轴线201线性地伸长。uv光阵列138沿着阵列138的长度发射uv光,以基本上提供uv光的壁状物或片状物。在一个或多个示例中,当需要使uv光阵列138能够跟随消毒环境内的部件表面的轮廓并随着表面弯曲和相交而朝向部件表面对准uv光时,推车100被自动控制以使uv光阵列138绕阵列轴线201旋转。推车100还被自动控制为沿着彼此垂直且垂直于阵列轴线201的两个轴线平移uv光阵列138。例如,当阵列轴线201平行于图1和图3中所示的横向轴线111时,推车100可以在消毒过程期间沿着竖直或高度轴线112竖直平移uv光阵列138以及沿着纵向轴线110纵向平移所述uv光阵列。
85.第一臂136a和第二臂136b可以是彼此的镜像复制,所以仅描述了一个臂136来表示两者。臂136包括多个互连的构件,所述互连的构件至少包括内部构件202和外部构件204。内部构件202连接到主干134,并且将外部构件204连接到主干134。uv光阵列138包括安装到内部构件202和外部构件204中的每个的至少一个细长的uv灯140。uv灯140沿着臂136的至少大部分长度伸长,以基本上发射uv光的壁状物。在所示的示例中,uv灯140仅沿着构件202、204的一侧206设置,但是在其他示例中,附加的uv灯140可以设置在外部构件204的端部208处和/或也沿着构件202、204的相对侧210设置。在所示的升高和伸出位置,臂136a、136b彼此平行并且平行于地板(例如,垂直于主干134的轴线)延伸。
86.所示的示例还示出了推车100上的传感器194的各个位置。例如,推车100可以包括在车轮142或基座132上的传感器194,所述传感器用于确定基座132与附近物体的接近度,以避开物体。附加的传感器194可以安装在臂136a、136b的端部208处,以确定与附近物体和/或结构的接近度。例如,端部208上的传感器194可以用于确定臂136a、136b从主干134延伸的距离。另一传感器194可意安装在主干134的顶部212处,其可以用于确定臂136a、136b到推车100上方的表面的接近度。
87.在示例中,推车100包括承载件或头部214。承载件214安装到主干134,并且可以相对于主干134绕图3中所示的竖直轴线112旋转。承载件214也可以相对于主干134绕横向轴线111旋转。臂136a、136b可以机械地联接到承载件214,使得承载件214的旋转引起臂136a、136b(和uv光阵列138)相对于主干134的相似运动。臂136a、136b可以在与承载件214的接合部处的铰链上枢转。
88.图7是根据示例的收起在内部舱102内的立体空间(monument)220内的uv光消毒推车100的视图。推车100被示出臂136相对于主干134处于折叠状态。在折叠状态下,臂136缩回以平行于主干134延伸,并且设置为与主干134相邻。臂136可以在折叠状态下物理地邻接(例如,接触)主干134。臂136通过在承载件214的铰链处枢转而缩回。推车100收起在其中的立体空间220可以是壁橱、前庭或另一个隔室。在自动模式下,控制单元190可在完成消毒任务后缩回臂136并将推车100驱动到立体空间220内的腔222中。可选地,信标装置可以设置在立体空间220内,其与推车100通信,以使推车100能够返回到原始的收起位置。
89.在示例中,控制单元190通过将清洁事件记录在存储器199中来自我监测uv光消毒
推车100的活动。例如,在消毒过程期间或返回到原始的收起位置时,一个或多个处理器197可以在日志或数据库中记录新记录。该记录可以提供最近一次清洁事件的日期和时间,并且可以可选地包括其他详细信息,诸如整个清洁事件的经过时间、施加到表面的uv光的计算剂量、经过消毒的内部舱102和/或交通工具104的标识、在清洁事件期间检测到的任何错误或意外物体、推车100是处于完全自动模式还是半自动模式等。清洁事件的日志可以用作舱102已通过机器恰当消毒的证据,而没有人为错误或疏忽的风险。可以根据需要从存储器199远程复制和/或发送日志,以进行数据收集、共享等。
90.图8和图9示出了用于相对于主干134升高和降低臂136以及由此升高和降低uv光阵列138的两个不同的致动器机构。每个臂136与主干134之间的角度称为“theta”(θ)。图8示出了包括弯曲齿轮232和圆形驱动齿轮234的弯曲的齿条和小齿轮致动器230。图9示出了包括在缸体244内的活塞242的线性致动器240。每个致动器230、240从电源192接收动力,并从控制单元190接收控制信号,以控制相应的臂136和主干134之间的角度theta。
91.图10是根据示例的uv光消毒推车100的俯视图。图11是根据示例的uv光消毒推车100的一个臂136的内部构件202和外部构件204的截面图。截面沿着图10中的线11
‑
11截取。在所示的示例中,每个臂136的外部构件204嵌套在内部构件202中。例如,内部构件202限定在两个导轨252之间的轨道250,外部构件204在轨道250内滑动,以控制臂136的长度或延伸。尽管在所示的示例中每个臂136具有两个构件202、204,但是在其他示例中,臂136可以仅具有一个构件或至少三个构件。例如,另一构件可以联接到外部构件204并且能控制为延伸超过外部构件204的端部208,以增大延伸长度。尽管未示出,但是如上所述,阵列138的uv灯140安装到构件202、204中的每个。
92.图12a、图12b和图13示出了用于调节臂136的延伸长度(例如,调节uv光阵列138的横向宽度)的两种不同的致动器机构。图12a和图12b示出了安装到内部构件202并且机械地联接到外部构件204的线性致动器260。例如,致动器260的平移活塞264的端部262联接到外部构件204,使得活塞264的延伸将外部构件204沿着轨道250在远离主干234的方向上推动,并且活塞264的缩回将外部构件204拉向主干234。图12a示出了相对于内部构件202延伸的外部构件204,图12b示出了缩回的外部构件204。图13示出了齿条和小齿轮或齿轮驱动的致动器270。图13中的放大的插入部分a示出了齿轮驱动器272可以被安装到内部构件202,并且外部构件204可以包括与齿轮驱动器272啮合的齿轮齿排274。齿轮驱动器272的动力旋转引起外部构件204相对于内部构件202沿着轨道250的平移。
93.图14a
‑
e描绘了根据另一示例的uv光消毒推车100的臂136和主干134,其中,外部构件204可以相对于内部构件202枢转。在图14a中,外部构件204相对于内部构件202向下枢转,以限定内部构件202与外部构件204之间的直角。在图14b中,外部构件204向上延伸,以与内部构件202限定直角。在图14c中,两个臂136a、136b从主干134向上延伸,并且近似彼此平行且与主干134平行。内部构件202和外部构件204在图14c中是同轴的。在图14d和图14e中,外部构件204相对于主干134以近似直角水平地延伸,但是内部构件202相对于主干134以倾斜角度延伸。独立地控制内部构件202和外部构件204相对于主干134以及相对于彼此的延伸角度的能力可以使控制单元190能够将uv光同时对准各种不同的表面,以便照射内部舱102的座椅120和侧壁118二者。
94.图15描绘了根据示例的安装到uv光消毒推车100的臂136的内部构件202的外部阵
列承载件280。外部阵列承载件280相对于内部构件202沿着轨道250是可平移的。外部阵列承载件280联接到外部构件204,并且被构造为使外部构件204相对于内部构件202旋转。独立地旋转内部构件202和外部构件204的能力可以使uv灯140沿着被消毒的目标表面提供有机扫掠运动。旋转还可以通过减少遮挡的存在来减轻可归因于遮挡的不一致的消毒。
95.图16描绘了根据示例的用于控制uv光消毒推车100的车轮142的位置的转向机构290。致动器290包括联接到横拉杆或连杆294的伺服转向电机292。伺服电机292通过控制单元190控制,以顺时针或逆时针旋转设定量,这使横拉杆294运动。横拉杆294的每端连接到相应的车轮承载件组件296。
96.现在参考图17,其更详细地示出了车轮承载件组件296中的一个。承载件组件296包括为车轮142产生扭矩的牵引电机300。承载件组件296可枢转或可旋转地固定到推车100的框架或基座132。横拉杆294通过伺服转向电机292的运动使得承载件组件296相对于基座132转动或枢转。由于承载件组件296包括车轮142,因此随着承载件组件296枢转,推车100转动。
97.图18示出了作为图16和图17中所示的转向机构290的替代方案的用于使推车100转向的齿条和小齿轮机构310。例如,横拉杆或连杆294可包括与联接到电机316的驱动齿轮314啮合的齿轮齿排312。如上所述,驱动齿轮314通过电机316的旋转引起横拉杆294的改变车轮142的角度的运动。图18示出了机构310的俯视图318和侧视图319。
98.图19示出了uv光消毒推车100的相对于主干134成角度的承载件214。承载件214可以相对于主干134绕图3中所示的横向轴线111旋转,以提供“beta”(β)角的一个范围。控制单元190控制致动器以设定beta角。臂136和uv光阵列138与承载件214一起旋转。因此,控制单元190可以使承载件214旋转,以改变uv光阵列138相对于内部舱102的定向,以用于将uv光朝向表面对准。例如,臂136沿着如图4中示意性描绘的清洁路径160的不同定向可以通过旋转承载件214以改变beta角来实现。
99.图20描绘了可以用于使承载件214绕图3中所示的竖直轴线112旋转的致动器320。使承载件214相对于主干134旋转角度“alpha”(α)可以相对于主干134和基座132旋动臂136和uv光阵列138。
100.图21a
‑
c示出了齿条和小齿轮致动器330可以用于延伸和缩回uv光消毒推车100的伸缩主干134。图21a示出了处于第一高度的推车100。图21b示出了由于主干134的延伸而处于比第一高度高的第二高度的推车100。图21c以侧视图332和俯视图334描绘了齿条和小齿轮致动器330。
101.图22示出了根据替代示例的uv光消毒推车100的基座132。以上在图1
‑
3中描述的示例中,主干134固定在基座132上的适当位置,并且整个推车100沿着过道126向前或向后移动或驱动,以沿着纵向轴线110移动臂136和uv光阵列138。在图22中,主干134沿着至少一个轴线相对于基座132是可平移的。可选地,主干134在保持安装在基座132上的同时,能够相对于基座132纵向和横向平移。例如,主干134可以经由使主干134能够沿着一个轴线移动的履带齿条和小齿轮机构342或带和滑轮机构340联接到基座132。任一机构340、342能够经由承载件轮343在通过基座132限定的轨道344内沿着垂直轴线滑动。例如,具有可平移的主干134使推车100的基座132能够拉入到两个排128之间的位置中,然后在主干134、承载件214和/或臂136平移和/或旋转以提供uv光阵列138的地形跟随的同时使推车在该位置保持
静止。一旦完成清洁路径160的一段,则推车100可前进到两个排128之间的另一位置,以重复该过程并对沿着清洁路径160的另一段对表面消毒。
102.图23描绘了根据替代示例的uv光消毒推车100的主干134。在所示的示例中,主干134被分段以在主干构件352之间提供多个铰接点350。沿着主干134的致动器可以使主干构件352在铰接点350处相对于彼此枢转,这可以选择性地将承载件214定位在空间中的各个不同位置。图23中所示的示例可以与图22中所示的基座132结合使用或代替其使用。
103.参照图1
‑
23,在至少一个示例中,uv光阵列138被构造为(通过uv灯140的操作)发射在诸如200nm至230nm之间的远uv光谱内的消毒uv光。在至少一个示例中,uv光阵列138发射具有222nm波长的消毒uv光。可选地,uv光阵列138被构造为发射除远uv光谱内以外的波长的消毒uv光。例如,uv光阵列138可以发射在uvc光谱内的消毒uv光。
104.在一个或多个示例中,控制单元190控制和/或引导uv光阵列138(和/或uv光消毒推车100的棒组件)相对于被消毒的表面的运动,以确保指定或预定剂量的uv光沿着清洁路径160、180连续地施加到表面。该剂量基于通过uv灯140发射的uv光的功率输出或幅度、从uv灯140到消毒表面的接近度或范围以及曝光或停留的时间。曝光时间表示当推车100的uv光阵列138扫过消毒表面时给定区域被uv光照射的时间长度。指定剂量可以基于操作员的意愿、监管要求等预先选择。uv光的功率输出或幅度可以基于uv灯140的能力极限和/或期望的能量消耗极限来设置。接近距离可以选择在几英寸内,诸如2英寸、3英寸、4英寸等。用于指定剂量、功率和接近度的这些特性可以存储在存储器199中,并且通过一个或多个处理器197访问。可选地,一些特性可以基于被消毒的表面的类型而变化,因此存储器199可以存储一些特性的多个值。在示例中,基于所存储的特性,一个或多个处理器可以计算停留时间,所述停留时间表示在消毒表面的给定区域上达到指定剂量所需的最小曝光时间量。一个或多个处理器可以使用停留时间来确定uv光阵列138相对于消毒表面的步进速度,以用于在不过度减慢消毒任务完成的情况下一致地达到指定剂量。步进速度指示对于特定的uv光和发射的uv光的输出功率,在检测的接近距离处对表面进行适当消毒的正确速度。
105.步进速度可以存储在存储器199中,并在追踪表面的轮廓时被控制单元190用于控制uv光阵列138的运动。例如,当uv光阵列138追踪表面时,控制单元190接收并分析来自传感器194和致动器196的反馈。控制单元190可以接收来自设置在臂136上的传感器194的接近度数据,所述传感器测量从uv灯140到舱102中的消毒表面的实际距离或范围。基于接近度数据,控制单元190可以确定uv光阵列138是否保持与表面的指定接近度(例如,阵列138是否保持在沿着相应的清洁路径160、180的规定位置)。此外,控制单元190可以确定uv光阵列138相对于表面的实际速度,并且可以将实际速度与存储在存储器199中的步进速度进行比较。实际速度可以基于来自致动器196的反馈来确定。例如,机械传动系和电机的动作可以通过控制单元190转换为uv光阵列138在空间中的物理运动,所述物理运动在被时间除以时提供实际速度。在另一示例中,一个或多个传感器194可以用于追踪uv光阵列138随时间的运动,以确定uv光阵列138的实际速度。
106.在示例中,如果uv光阵列138的实际速度与步进速度相差超过指定的公差范围(例如2%、5%等),则控制单元190可以产生控制信号以改变uv光阵列138相对于表面的运动,以减小实际速度和步进速度之间的差异。可以将控制信号传送到一个或多个致动器194,所述致动器可以基于控制信号来调节致动器194的操作速度。例如,如果实际速度快于步进速
度,则供应的uv光的剂量可能不足以提供所需的消毒水平或量。作为响应,控制单元190产生控制信号以减慢uv光阵列138的运动,以增大剂量。相反,如果实际速度慢于步进速度,则供应到表面的uv光的剂量可能多于足以提供所需的消毒水平的程度,从而有机会通过增大uv光阵列138的速度来提高能源效率并降低完成消毒任务的总清洁时间。
107.在半自动模式下,uv光阵列138的速度可以部分地通过操作员沿着过道126推动或拉动推车100来控制。在确定实际速度与步进速度之间的差异时,控制单元190可以向输出装置198产生控制信号。例如,如果实际速度比步进速度快,则所产生的控制信号使输出装置198警告或通知操作员速度太快并且提示放慢推车100的运动。警报可通过由一个或多个输出装置198提供的相应的灯光效果(例如,发出红光、闪烁的灯光等)、音频效果(例如,频繁、高频和/或大声的哔哔声)和/或触觉效果(例如,手柄146的振动)来指示速度过快。在另一示例中,如果实际速度慢于步进速度,则控制信号可使得输出装置198提供诸如黄光的不同的相应灯光和/或音频效果,以向操作员指示操作员可以提高推车100的速度。如果实际速度在步进速度的公差范围内,则控制信号可以使得输出装置198提供诸如绿灯的另一相应的灯光和/或音频效果,或者可以不提供任何灯光和/或音频效果。
108.如图4中所示,当uv光消毒推车100的臂136和其他可移动部件被致动以控制uv光阵列138沿着舱102中的表面轮廓遵循清洁路径160、180行进时,推车100沿着过道126的速度将发生变化。在基座132沿着过道126的滚动运动用于使uv光阵列138沿着纵向轴线移动的一个或多个示例中,控制单元190可根据被消毒的表面自动控制基座132和车轮142的运动方向和速度。例如,当uv光阵列138对成排的座椅120之间的地板114或天花板116进行消毒时,基座132可以基于所确定的停留时间以相对恒定的速度移动。但是,例如,当uv光阵列138基本竖直地移动以对座椅120的座椅靠背的后部消毒时,基座132被控制为保持静止直到再次期望uv光阵列138的纵向运动。基于表面的轮廓,基座132甚至可以在与清洁路径的总体方向相反的逆向方向上移动,至少暂时地使uv光阵列138能够保持紧贴轮廓并且避免与舱102中的任何物体直接接触。
109.在图22和图23中所示的uv光阵列138可以相对于基座132纵向移动的示例中,基座132可以经由控制单元190和/或操作员来控制,以依次移动然后暂停在沿着过道126的长度的各个位置处。例如,推车100可以移动或驱动到与排128对齐或在两个排128之间的位置。然后,推车100的基座132保持静止,而主干134、承载件214和/或臂136操纵uv光阵列138以沿着一排或两排遵循表面的轮廓。如图22和/或图23中所示,因为uv光阵列138的纵向运动可以通过移动主干134来实现,所以基座132可以保持静止。在完成对一排或两排的消毒之后,基座132然后被控制以沿着过道126前进到另一位置,以重复该过程。
110.在替代示例中,uv光消毒推车100可包括能从臂136选择性地延伸的附加uv灯140。附加uv灯140可设置在安装到臂136的端部执行器上并选择性地从臂136突出。例如,端部执行器可以选择性地枢转离开臂136的平面,以将相应的uv灯140定位在臂136的前面或后面(例如,沿着纵向轴线)。端部执行器上的uv灯140可以相对于臂136上的uv灯140以达到90度的角度定向,从而在端部执行器处提供l或t形的uv阵列。端部执行器上的uv灯140可用于在腔内和诸如乘客座椅120下方的物体下方进行消毒。例如,尽管横向延伸穿过座椅120的臂136可能无法足够靠近在座椅下方的区域,但端部执行器可以从臂136突出到紧靠座椅底部下方的空间,以对座椅120下方的地板114和/或座椅底部的底部表面消毒。端部执行器上的
uv灯140也可用于清洁扶手、部分储物箱、墙壁等。通过推车100提供的许多平移和旋转轴线使uv灯140能够定位和对准基本复制手持uv灯棒的人员的能力,而不会出现与手动消毒相关的速度、覆盖范围和接近性的固有矛盾。
111.在至少一个实施方式中,uv光消毒推车100包括联接到推车100的诸如手持式uv棒的棒组件。棒组件为人员提供与通过推车100的自动消毒结合使用棒的选择,以对推车100难以进入的区域进行消毒,或者为某些高流量区域提供额外的uv剂量。棒可以通过至少电源线连接到推车100,以为棒上的uv灯供电。替代地,棒可以由电池供电。可选地,棒可以包括光传感器,所述光传感器向操作员指示是否uv灯设置在距被消毒表面期望的接近距离(或范围)处。在第63/027,869号美国临时申请中公开了指示棒距表面的范围的光传感器。
112.在一个或多个示例中,提供一种紫外(uv)光消毒推车,其包括uv光阵列、主体、致动器和控制单元。uv光阵列包括被构造为发射uv光以对部件的表面消毒的uv灯。主体包括移动基座和通过基座支撑的多个互连的刚性构件。uv灯安装到刚性构件中的至少一个。致动器机械地连接到主体。致动器中的至少一些被构造为控制刚性构件相对于彼此以及相对于基座的运动。控制单元被构造为产生用于控制致动器的控制信号,以使uv灯阵列沿着遵循表面轮廓的清洁路径移动。
113.可选地,刚性构件包括臂和主干。主干安装到移动基座。臂从主干在相反的方向上延伸并保持uv灯中的至少一些,以提供uv灯的线性布置。臂中的每个可至少包括内部构件和外部构件。内部构件布置在外部构件与主干之间。外部构件被构造为缩回以嵌套在内部构件内并且从内部构件线性地向外延伸以增大臂的长度。可选地,致动器中的至少一些连接到臂并且可通过控制单元控制,以将臂枢转至折叠状态,在所述折叠状态下,臂平行于主干并与主干相邻。
114.可选地,uv光阵列包括沿着阵列轴线延伸的多个uv灯的线性布置。致动器和主体被构造为沿着彼此垂直且垂直于阵列轴线的两个轴线平移uv光阵列,并且被构造为使uv光阵列绕阵列轴线旋转。
115.可选地,移动基座包括与地板接合并支撑推车的多个车轮。致动器包括在移动基座上用于驱动车轮的旋转和使车轮转向的电机。通过控制单元产生以使uv灯阵列沿着清洁路径移动的控制信号可以包括用于移动基座上的电机的控制信号,以用于沿着推车路径驱动移动基座来沿着平行于推车路径的轴线平移uv灯阵列。
116.可选地,主体包括被构造为通过沿着推车路径手动推动推车的操作员握持的可伸缩手柄,以沿着平行于推车路径的轴线平移uv光阵列。
117.可选地,推车还包括传感器,所述传感器安装在主体上并被构造为产生传感器数据,所述传感器数据指示推车到部件的表面或到另一部件的表面的接近度。控制单元被构造为基于传感器数据产生控制信号,以避免推车与部件的表面或另一部件的表面之间的碰撞。
118.可选地,控制单元包括存储装置,所述存储装置存储部件所位于的环境的三维地图。控制单元被构造为确定uv光阵列相对于三维地图的参考位置,并基于三维地图以及uv光阵列的参考位置产生控制信号以使uv光阵列在环境中沿着清洁路径移动。
119.可选地,推车还包括传感器,所述传感器安装在主体的靠近uv灯的刚性构件上。传感器被构造为产生指示uv灯到部件的表面的接近度的传感器数据。控制单元被构造为基于
传感器数据产生控制信号,以将uv灯保持在距表面指定的接近距离处,以确保将指定剂量的uv光施加到表面。
120.可选地,控制单元包括存储用于uv光阵列的步进速度的存储装置。步进速度基于uv灯的功率输出以及uv灯与部件的表面之间的指定接近距离,以向表面提供指定剂量的uv光。控制单元被构造为产生控制信号,以控制致动器使uv光阵列以基于步进速度的速率沿着清洁路径移动。控制单元可以被构造为确定uv光阵列相对于部件的表面的实际速度,并且将实际速度与步进速度进行比较。响应于实际速度大于步进速度,控制单元可以被构造为产生控制信号,以控制致动器来减慢uv光阵列沿着清洁路径的运动。
121.可选地,控制单元包括存储装置,并且控制单元被构造为将通过推车随时间执行的清洁任务的记录存储在存储装置中。
122.可选地,控制单元被构造为产生用于致动器中的至少两个致动器的控制信号,以提供uv光阵列的复合运动,使得uv光阵列执行以下项中的一个或多个:(i)同时绕两个不同的轴线旋转,(ii)沿着两个不同的轴线同时平移,或(iii)绕一个轴线旋转同时绕一个轴线或不同的轴线平移。
123.在一个或多个示例中,提供一种方法,所述方法包括提供推车,所述推车包括保持紫外(uv)光阵列的主体。uv光阵列包括被构造为发射uv光以对部件的表面消毒的uv灯。推车还包括机械地连接到主体的致动器和通信地连接到致动器的控制单元。所述方法包括:经由控制单元确定用于uv光阵列的遵循表面的轮廓的清洁路径;以及经由控制单元产生控制信号,以控制致动器使主体移动使得uv光阵列遵循清洁路径。
124.可选地,uv光阵列包括沿着阵列轴线延伸的多个uv灯的线性布置。可以产生控制信号以控制致动器和主体沿着彼此垂直且垂直于阵列轴线的两个轴线平移uv光阵列,并随着uv光阵列遵循清洁路径行进而使uv光阵列绕阵列轴线旋转。
125.可选地,主体包括具有支撑基座的多个车轮的移动基座,并且致动器包括在基座上的一个或多个电机,以用于驱动车轮的旋转和使车轮转向。产生控制信号可以包括产生用于沿着推车路径驱动移动基座以沿着平行于推车路径的轴线平移uv光阵列的控制信号。
126.可选地,该方法还包括接收传感器数据,所述传感器数据指示uv光阵列到部件的表面的接近度。基于传感器数据产生控制信号,以用于以下项中的一个或多个:(i)避免推车与部件的表面之间发生碰撞,或者(ii)保持uv灯与部件的表面之间的指定接近距离,以向表面提供指定剂量的uv光。
127.可选地,该方法还包括将用于uv光阵列的步进速度存储在存储装置中。步进速度可以基于uv灯的功率输出以及uv灯与部件的表面之间的用于向表面提供指定剂量的uv光的指定接近距离。该方法还可以包括:经由控制单元,确定uv光阵列的相对于部件的表面的实际速度;以及产生控制信号,以控制致动器响应于实际速度与步进速度的差异超过指定的公差范围来改变uv光阵列的沿着清洁路径的实际速度。
128.如本文中所使用的,术语“控制单元”、“中央处理单元”、“cpu”、“计算机”等可以包括任何基于处理器或基于微处理器的系统,其包括使用微控制器、精简指令集计算机(risc)、专用集成电路(asic)、逻辑电路以及能够执行本文中所述的功能的包括硬件、软件或其组合的任何其他电路或处理器的系统。这仅是示例性的,因此无意于以任何方式限制这样的术语的定义和/或含义。
129.控制单元190被构造为执行存储在一个或多个数据存储单元或元件(诸如,一个或多个存储器199)中的一组指令,以处理数据。数据存储单元还可以根据期望或需要存储数据或其他信息。数据存储单元可以呈信息源或处理机内的物理存储元件的形式。
130.指令集可以包括各种命令,所述命令指示作为处理机的控制单元190以执行诸如本文中描述的主题的各个示例的方法和过程的特定操作。指令集可以是软件程序的形式。该软件可以呈诸如系统软件或应用软件的各种形式。此外,软件可以呈单独程序的集合、较大程序内的程序子集或程序的一部分的形式。软件还可以包括呈面向对象编程形式的模块化编程。通过处理机对输入数据的处理可以响应于用户命令,或者响应于先前处理的结果,或者响应于另一处理机做出的请求。
131.本文中的示例图可以示出一个或多个控制或处理单元、诸如控制单元190。应当理解,处理或控制单元可以表示可以被实施为具有执行本文中所述操作的指令的相关联的硬件的电路、电路系统或其一部分(例如,诸如计算机硬盘驱动器、rom、ram等的存储在有形且非暂时性计算机可读存储介质上的软件)。硬件可以包括硬连线以执行本文中描述的功能的状态机电路。可选地,硬件可以包括电子电路,所述电子电路包括和/或连接到一个或多个基于逻辑的装置,诸如微处理器、处理器、控制器等。可选地,控制单元190可以表示诸如现场可编程门阵列(fpga)、专用集成电路(asic)、微处理器等中的一个或多个的处理电路。各个示例中的电路可以被构造为执行一个或多个算法,以执行本文中描述的功能。无论在流程图或方法中是否明确标识,一个或多个算法可包括本文中公开的示例的方面。
132.如本文中所使用的,术语“软件”和“固件”是可互换的,并且包括存储在数据存储单元(例如,一个或多个存储器)中以供计算机执行的任何计算机程序,其包括ram存储器、rom存储器、eprom存储器、eeprom存储器和非易失性ram(nvram)存储器。上述数据存储单元的类型仅是示例性的,因此对于可用于存储计算机程序的存储器的类型没有限制。
133.本公开的特定示例提供了系统和方法,以自动地控制uv灯遵循表面的轮廓,从而提供对表面的一致、高效和有效的消毒。uv灯的自动控制确保将正确剂量的uv光传递到表面上,以有效地清洁表面。本文中所述的uv光消毒推车是能折叠的且是能收起在交通工具上的,使得推车可以在需要时被操作,然后在不需要时被收起,诸如在交通工具的旅行期间被收起。
134.图24示出了根据本公开的示例的uv光消毒系统或推车100的前视立体图。如本文中所述,uv光消毒推车100包括具有移动基座132的主体131以及uv光阵列138,所述uv光阵列包括被构造为发射uv光以对部件的表面消毒的uv灯140。uv光消毒推车100还包括棒组件1202。在至少一个实施方式中,棒组件1202联接到主体131。例如,棒组件1202联接到基座132。棒组件1202被构造为选择性地在诸如基座132上的收起位置与棒组件1202移动远离基座132的展开位置之间移动。在展开位置,棒组件1202可以通过系绳1203连接到基座132,所述系绳可以包括电源线、电缆、空气软管等。
135.在至少一个实施方式中,uv光消毒推车100的uv光阵列138被构造为发射诸如在远uv光光谱或uvc光谱内的特定波长的uv光,棒组件1202的uv灯被构造为发射特定波长的uv光,其可以与通过uv光消毒推车100的uv光阵列138发射的uv光相同或不同。作为示例,uv光阵列138可以发射诸如在远uv光光谱或uvc光谱内的第一波长的uv光,棒组件1202的uv灯可以发射不同于第一波长的诸如在远uv光光谱或uvc光谱内的第二波长的uv光。
136.在至少另一个示例中,uv光消毒推车100可以是具有一个或多个uv光源、诸如一个或多个uv灯140的厨房(galley)推车。棒组件1202可以联接到厨房推车。
137.在至少一个示例中,棒组件1202通过系绳1203附接到主体131,所述系绳包括电源线和/或冷却空气软管。如本文中所述,棒组件1202从uv消毒推车100的一个或多个电源接收电力。棒组件1202包括uv灯140,所述uv灯被构造为发射诸如在200nm至320nm之间的任何杀菌uv波段中的uv光。在至少一个示例中,棒组件1202的uv灯140被构造为发射在远uv光光谱中的诸如在200nm至230nm之间的uv光,已经发现该uv光对于人类是安全的。
138.uv棒组件1202允许个人对部件的可能被遮挡或可能未被uv光阵列138充分杀菌的表面进行杀菌。例如,棒组件1202可以从主体131上的收起位置移动,并且相对于可能被遮挡的表面移动和定向。
139.如本文中所述,本公开的示例提供一种uv光消毒推车100,所述uv光消毒推车包括被构造为发射uv光的一个或多个第一uv灯140并包括棒组件1202,所述棒组件包括被构造为发射uv光的一个或多个第二uv灯140。在至少一个实施方式中,uv光阵列138包括第一uv灯140。作为另一个例,uv光消毒推车100可以是厨房推车,其包括固定在其部分上或固定在其部分内的一个或多个第一uv灯140。
140.可选地,uv光消毒推车100的尺寸、形状和构造可以与所示的不同。在至少一个示例中,uv光消毒推车100的尺寸和形状被设计为厨房推车。在至少一个示例中,uv光消毒推车100包括固定到其外部的诸如一个或多个uv灯的uv光源,无论其是否为可移动阵列的一部分。在至少另一个示例中,推车部分可以不包括uv光源。相比之下,uv光消毒推车100可以包括棒组件1202,所述棒组件具有联接到可移动推车(无论是如图24所示地构造还是不同地构造)的一个或多个uv灯,所述可移动推车可包括或可不包括另外的uv光源。
141.图25示出了根据本公开的示例的在交通工具104的内部舱102内的uv光消毒推车100的透视图。如本文中所述,uv光消毒推车100被构造为移动通过过道126。棒组件1202在图25中处于展开位置。棒组件1202通过个人移动,以经由棒组件1202的uv灯140发射消毒uv光,以对部件的可能被遮挡的表面消毒。例如,遮挡的表面可能无法接收到来自uv光消毒推车100的uv光阵列138的uv光。因此,棒组件1202移动到否则可能没有充分暴露于uv光阵列138发射的uv光的区域。
142.图26示出了图24的uv光消毒推车100的侧视图。棒组件1202可以在各种不同的定向上移动和操纵。例如,棒组件1202可以朝向并靠近诸如在内部舱内的座椅之间的部件从主体131移开。棒组件1202可以延伸、旋转、成角度等,以到达否则可能不容易通过uv光阵列138到达的区域。
143.棒组件1202为uv光消毒推车100提供更多的通用性。与uv光阵列138相比,棒组件1202能够到达更狭窄的空间。与紫外线阵列138相比,棒组件1202能够移动得更靠近内部舱内的特定部件(诸如,座椅之间的托盘桌、壁部分等)。棒组件1202的uv灯140能够将消毒的uv光发射到可能被其他部件和/或uv光消毒推车100本身遮挡的表面上。
144.图27示出了图24的uv光消毒推车100的俯视图。如所示的,个人1205可以将棒组件1202移动到展开位置,在所述展开位置,棒组件1202可以相对于主体131移动。
145.如所示的,棒组件1202通过系绳1203连接到主体131,所述系绳可以包括一个或多个电力电缆、空气软管等。在至少另一个示例中,棒组件1202未通过系绳1203连接至主体
131。相比之下,棒组件1202可相对于主体131完全独立。在该示例中,棒组件1202可包括其自身的电源,诸如一个或多个电池。
146.如本文中所述,个人1205诸如通过在内部舱的过道内推动uv光消毒推车100来移动uv光消毒推车100。可选地,uv光消毒推车100可以包括一个或多个致动器、电机等,其允许uv光消毒推车100在环境内自动移动。也就是说,uv光消毒推车100可以通过个人移动或自动移动。
147.图28示出了根据本公开的示例的uv光消毒推车100的俯视图。在至少一个示例中,uv光消毒推车100包括通过第一系绳1203a联接到主体131的第一棒组件1202a以及通过第二系绳1203b联接到主体131的第二棒组件1202b。
148.图29示出了根据本公开的示例的具有处于收起位置的棒组件1202的uv光消毒推车100的透视前视图。例如,棒组件1202可以通过一个或多个夹子、闩锁、卡扣、带等可移除地固定到主体131的一部分,诸如基座132。在至少一个示例中,基座132包括凹部,所述凹部与棒组件1202的至少一部分的外表面相符。棒组件1202被保持在凹部内。作为另一示例,处于收起位置的棒组件1202可以通过过盈配合固定到基座132。作为另一示例,主体131包括被可移动门覆盖的内部隔室。当不使用时,棒组件1202可以被收起在内部隔室内。
149.图30示出了根据本公开的示例的具有处于展开位置的棒组件1202的uv光消毒推车100的透视前视图。个人根据需要将棒组件1202从收起位置移动到展开位置,并将棒组件1202移动到否则可能不容易被uv光阵列138到达的区域。
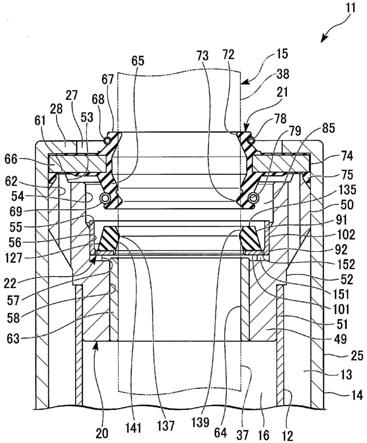
150.图31示出了根据本公开的示例的棒组件1202的横向透视俯视图。棒组件1202包括联接到手柄1208的消毒头1206。在至少一个示例中,消毒头1206通过联接器1210可移动地联接到手柄1208。
151.消毒头1206包括罩1212,所述罩具有从近端1216延伸至远端1218的外部覆盖件1214。如本文中所述,罩1212包含诸如uv灯的uv光源。
152.可选地,棒组件1202可包括连接到固定手柄的消毒头1206。此外,棒组件1202的尺寸和形状可以与所示的不同。
153.端口1220从近端1216延伸。端口1220联接至软管1222,所述软管进而联接至uv光消毒推车100的一部分,诸如主体131的一部分(如图24
‑
30所示)。软管1222是图24
‑
30中所示的系绳1203的示例。在至少一个示例中,软管1222包含将uv光消毒推车100内的电力源或电源(诸如一个或多个电池)联接到罩1212内的uv灯的电线、电缆、布线等。可选地,电线、电缆、布线等可以在软管1222的外部。在至少一个实施方式中,软管1222还包含将罩1212的内部腔室流体地联接到uv光消毒推车100内的鼓风机、真空发生器、空气过滤器等的空气输送管线、诸如空气管。
154.联接器1210固定到罩1212的外部覆盖件1214,诸如固定在靠近近端1216处。联接器1210可以包括固定到外部覆盖件1214的固定梁1224,诸如通过一个或多个紧固件、粘合剂等。延伸梁1226从固定梁1224向外延伸,从而使手柄1208与罩1212间隔开。支承组件1228从延伸梁1226与固定梁1224相对地延伸。支承组件1228包括一个或多个支承件、轨道等,其允许手柄1208在箭头1259的方向上相对于联接器1210线性平移,和/或在弧形1261的方向上绕枢轴枢转。可选地,固定梁1224可以包括支承组件,除了手柄1208联接到支承组件1228之外还或者代替手柄1208联接到支承组件1228,所述支承组件允许消毒头1206在箭头a的
方向上平移和/或在弧形b的方向上转动(例如,旋转)(例如,手柄1208可以固定到联接器1210)。
155.在至少另一个示例中,棒组件1202不包括联接器1210。相比之下,例如,手柄1208可以固定至罩1212。
156.在至少一个示例中,手柄1208包括可以比罩1212长的棒、杆、梁或类似物1230。可选地,杆1230可以比罩1212短。一个或多个抓握部232固定到棒1230。抓握部1232被构造为被个人抓握并保持。抓握部1232可包括符合人体工程学的触觉特征1234。
157.图32示出了图31的棒组件1202的透视后视图。图33示出了图31的棒组件1202的透视侧视图。参照图32和图33,手柄1208可以通过具有枢轴1238的支承件1236枢转地联接到联接器1210,所述枢轴将手柄1208可枢转地联接到联接器1210。手柄1208还可被构造为线性地移入和移出支承件1236。例如,手柄1208可被构造为伸缩进出支承件1236。可选地或替代地,在至少一个实施方式中,手柄1208可以包括伸缩主体,所述伸缩主体允许手柄1208向外延伸并向内后退。在至少一个其他实施方式中,手柄1208可以不被构造为相对于罩1212移动、延伸、缩回等。
158.为了使消毒头1206相对于手柄1208延伸,使消毒头1206相对于手柄1208向外滑动(或者,使手柄1208相对于消毒头1206向后滑动)。如所指出的,消毒头1206能够经由联接器1210相对于手柄1208线性地平移。消毒头1206的向外延伸允许棒组件1202容易地到达远距离区域。替代地,消毒头1206可以不相对于手柄1208线性地平移。
159.为了进一步到达,手柄1208可以被构造为线性平移,例如通过伸缩部分线性平移,以允许消毒头1206进一步向外到达。替代地,手柄1208可以不被构造为延伸和缩回。
160.在至少一个实施方式中,手柄1208可以包括锁定件。锁定件被构造为被选择性地操作以将手柄1208固定到期望的延伸(或缩回)位置。
161.如所指出的,消毒头1206被构造为经由联接器1210相对于手柄1208旋转。相对于柄1208旋转消毒头1206允许消毒头1206移动至期望位置,并且扫掠或以其他方式伸入如果将消毒头1206刚性地固定到手柄1208上则难以到达的区域。替代地,消毒头1206可以相对于手柄1208是不可旋转的。
162.图34示出了根据本公开的示例的消毒头1206的uv灯140和反射器1242的透视端视图。uv灯140和反射器1242被固定在消毒头1206的罩1212(例如,图31中所示)内。在至少一个实施方式中,反射器1242被固定到罩1212的底侧1241,例如通过一个或多个粘合剂固定。作为另一示例,反射器1242是罩1212的组成部分。例如,反射器1242可以是罩1212的下侧1241,或者以其他方式提供罩1212的下侧1241。反射器1242提供反射表面1243(诸如,由特氟龙、镜面等形成),所述反射表面被构造为向外反射通过uv灯140发射的uv光。在至少一个示例中,罩1212可以是或包括由玻璃纤维形成的壳体,并且反射器1242可以由反射率达到98%的特氟龙形成。在至少一个实施方式中,反射器1242可以是多件式反射器。
163.反射器1242可以沿着罩1212的下侧1241的整个长度延伸。可选地,反射器1242可以沿着小于罩1212的下侧1241的整个长度延伸。
164.uv灯140可以沿着整个长度(或者基本上沿着整个长度,诸如在端部1216和1218之间)延伸。例如,uv灯140通过一个或多个诸如支架的安装件固定到反射器1242和/或罩1212。uv灯140包括一个或多个uv光发射器、诸如一个或多个灯泡、发光元件(诸如发光二极
管)等。在至少一个实施方式中,uv灯140被构造为发射诸如在200nm至230nm之间的波长的远uv光谱的uv光。在至少一个实施方式中,uv灯140被构造为发射具有222nm的波长的uv光。例如,uv灯140可以是或包括被构造为发射具有222nm的波长的uv光的300w灯泡。替代地,uv灯140可以被构造为在uv光谱的诸如uvc光谱的其他部分中发射uv光。
165.如所示的,反射器1242包括通过上弯曲壁1246连接在一起的平坦的竖直侧壁1244。上弯曲壁1246可以远离uv灯140向外弯曲。例如,上弯曲壁1246可以具有抛物线形截面和/或轮廓。
166.已经发现,直的线性的侧壁1244提供从uv灯1240朝向期望位置发射和发射到期望位置上的uv光的期望反射和/或聚焦。替代地,侧壁1244可以不是线性且平坦的。
167.图35示出了根据本公开的示例的uv灯140和消毒头1206的反射器1242的透视端视图。除了侧壁1244可以从上弯曲壁1246向外倾斜之外,图35中所示的反射器1242类似于图34中所示的反射器1242。
168.图36示出了根据本公开的示例的uv灯140和消毒头1206的反射器1242的透视端视图。在该实施方式中,侧壁1244可以根据上弯曲壁1246的曲率弯曲。
169.图37示出了紫外光光谱。参照图1
‑
图37,在至少一个示例中,诸如uv灯阵列138和棒组件1202的uv灯的uv灯被构造为发射诸如在200nm到230nm之间的远uv光谱内的消毒uv光。在至少一个实施方式中,uv灯发射具有222nm波长的消毒uv光。
170.可选地,紫外线灯可以被构造为发射波长在200nm至230nm之间的波长以外的uv光。例如,uv灯可以发射uvc光谱内的uv光。
171.图38示出了根据本公开的实施方式的内部舱1342(诸如,图1中所示的内部舱102)内的厨房(galley)1340的透视图。厨房1340包括一个或多个推车隔室1344。推车隔室1344被构造为接收和保持厨房推车1300。例如,厨房推车1300被构造为在箭头1383的方向上移入或移出推车隔室1344。
172.在至少一个示例中,厨房推车1300提供uv光消毒推车100。例如,厨房推车1300包括诸如一个或多个uv灯140的一个或多个uv光源,所述uv光源可以相对于厨房推车1300固定或是可移动的。厨房推车1300还包括通过系绳1203连接到厨房推车1300的棒组件1202。
173.图39示出了根据本公开的示例的uv光消毒方法的流程图。uv光消毒方法包括:在1400处,在uv光消毒推车上或内设置一个或多个第一uv灯;在1402处,在uv光消毒推车上或内设置包括一个或多个第二uv灯的棒组件;在1404处,使一个或多个棒组件在收起位置和展开位置之间移动。
174.在至少一个示例中,所述设置一个或多个第一uv灯包括将一个或多个第一uv灯固定至uv光消毒推车的主体的一个或多个部分。此外,在至少一个示例中,所述固定包括通过一个或多个系绳将一个或多个棒组件连接到主体。一个或多个系绳可以包括电源线、电缆或空气软管中的一个或多个。
175.在至少一个示例中,uv光消毒方法还包括:将uv光消毒推车移入和移出交通工具的内部舱的厨房内的隔室内。
176.在至少一个示例中,所述提供一个或多个棒组件包括:设置第一棒组件和第二棒组件。
177.参照图1
‑
图39,本发明的示例提供自动的或半自动的移动uv消毒设备,所述移动
uv消毒设备可以在设备移动时始终如一且高效地对结构和区域进行杀菌。
178.此外,本公开包括根据以下条款的实施方式:
179.条款1:一种紫外(uv)光消毒推车,包括:
180.一个或多个第一uv灯,被构造为发射uv光;
181.一个或多个棒组件,包括被构造为发射uv光的一个或多个第二uv灯,
182.其中,所述一个或多个棒组件在收起位置和展开位置之间是能移动的。
183.条款2:根据条款1所述的uv光消毒推车,还包括具有移动基座的主体,其中,所述一个或多个第一uv灯固定至所述主体的一个或多个部分。
184.条款3.根据条款2所述的uv光消毒推车,其中,所述一个或多个棒组件通过一个或多个系绳连接到所述主体。
185.条款4.根据条款3所述的uv光消毒推车,其中,所述一个或多个系绳包括电源线、电缆和空气软管中的一个或多个。
186.条款5.根据条款1
‑
4中的任一项所述的uv光消毒推车,其中,所述uv光消毒推车是被构造为移入和移出交通工具的内部舱的厨房内的隔室的厨房推车。
187.条款6.根据条款1
‑
5中的任一项所述的uv光消毒推车,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射远uv光谱内的波长的uv光。
188.条款7.根据条款1
‑
6中的任一项所述的uv光消毒推车,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射222nm波长的uv光。
189.条款8.根据条款1
‑
6中的任一项所述的uv光消毒推车,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射uvc光谱内的波长的uv光。
190.条款9.根据条款1
‑
6中的任一项所述的uv光消毒推车,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射254nm波长的uv光。
191.条款10.根据条款1
‑
9中的任一项所述的uv光消毒推车,其中,所述一个或多个棒组件包括第一棒组件和第二棒组件。
192.条款11.根据条款1
‑
10中的任一项所述的uv光消毒推车,其中,所述一个或多个棒组件包括:
193.手柄;
194.消毒头,联接到手柄,其中,所述消毒头包括一个或多个第二uv灯。
195.条款12.根据条款11所述的uv光消毒推车,其中,所述消毒头能移动地联接到所述手柄。
196.条款13.一种紫外(uv)光消毒方法,包括:
197.在uv光消毒推车上或内设置一个或多个第一uv灯;
198.在所述uv光消毒推车上或内设置包括一个或多个第二uv灯的一个或多个棒组件;
199.在收起位置和展开位置之间移动所述一个或多个棒组件。
200.条款14.根据条款13所述的uv光消毒方法,其中,所述设置一个或多个第一uv灯的步骤包括:将所述一个或多个第一uv灯固定至所述uv光消毒推车的主体的一个或多个部分。
201.条款15.根据条款14所述的uv光消毒方法,其中,所述固定包括:通过一个或多个系绳将所述一个或多个棒组件连接到所述主体。
202.条款16.根据条款15所述的uv光消毒方法,其中,所述一个或多个系绳包括电源线、电缆或空气软管中的一个或多个。
203.条款17.根据条款13
‑
16中的任一项所述的uv光消毒方法,还包括:将所述uv光消毒推车移入和移出交通工具的内部舱的厨房内的隔室内。
204.条款18.根据条款13
‑
17中的任一项所述的uv光消毒方法,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射远uv光谱内的波长的uv光。
205.条款19.根据条款13
‑
18中的任一项所述的uv光消毒方法,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射222nm波长的uv光。
206.条款20.根据条款13
‑
17中的任一项所述的uv光消毒方法,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射uvc光谱内的波长的uv光。
207.条款21.根据条款13
‑
17中的任一项所述的uv光消毒方法,其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射254nm波长的uv光。
208.条款22.根据条款13
‑
21中的任一项所述的uv光消毒方法,其中,所述设置一个或多个棒组件的步骤包括:设置第一棒组件和第二棒组件。
209.条款23.一种紫外(uv)光消毒推车,包括:
210.主体,具有移动基座;
211.一个或多个第一uv灯,固定到所述主体的一个或多个部分,其中,所述一个或多个第一uv灯被构造为发射uv光;
212.一个或多个棒组件,包括被构造为发射uv光的一个或多个第二uv灯,其中,所述一个或多个棒组件通过一个或多个系绳连接到所述主体,
213.其中,所述一个或多个棒组件在收起位置和展开位置之间是能移动的,
214.其中,所述一个或多个第一uv灯和所述一个或多个第二uv灯被构造为发射处于远uv光谱内的波长的uv光。
215.条款24.根据条款23所述的uv光消毒推车,其中,所述一个或多个棒组件包括:
216.手柄;
217.消毒头,能移动地联接至所述手柄,其中,所述消毒头包括所述一个或多个第二uv灯。
218.尽管可以使用诸如顶部、底部、下部、中间、侧面、水平、垂直、前面等的各种空间和方向术语来描述本公开的示例,但是应理解的是,这样的术语仅用于针对图中所示的方向。方向可以颠倒、旋转或以其他方式改变,使得上部是下部,反之亦然,水平变为竖直等。
219.如本文中所使用的,“被构造为”执行任务或操作的结构、限制或元素特别地以与任务或操作相对应的方式在结构上形成、构造或适配。为了清楚和避免疑义的目的,仅能够被修改以执行任务或操作的对象未“被构造为”执行本文中所使用的任务或操作。
220.应理解的是,以上描述意在说明而非限制性的。例如,上述示例(和/或其方面)可以彼此组合使用。此外,在不脱离本公开范围的情况下,可以做出许多修改,以使特定情况或材料适应于本公开的各种示例的教导。尽管本文中描述的材料的尺寸和类型意在限定本公开的各种示例的参数,但是这些示例绝不是限制性的,而是示例性示例。在查阅以上描述之后,许多其他示例对于本领域技术人员将是显而易见的。因此,应参考所附权利要求书以及这样的权利要求书所赋予的等效物的全部范围,确定本公开的各种示例的范围。在所附
权利要求书和本文中的详细描述中,术语“包括”和“在其中”被用作相应术语“具有”和“其中”的通俗易懂的词语的等效词。此外,术语“第一”、“第二”和“第三”等仅用作标签,并不意在对其对象施加数字要求。此外,以下权利要求书的限制不以装置加功能的格式撰写,也不意在基于35u.s.c
§
112(f)来解释,除非并在这样的权利要求限制之前明确使用后接没有进一步结构的功能说明的“用于
……
的手段”一词。
221.本书面描述使用示例来公开本公开的包括最佳模式的各种示例,并且还使本领域的任何技术人员能够实践本公开的包括制造和使用任何装置或系统以及执行任何合并的方法的各种示例。本公开的各种示例的可专利范围通过权利要求限定,并且可以包括本领域技术人员想到的其他示例。如果这样的示例具有与权利要求的字面语言没有不同的结构元素,或者如果这些示例包括与权利要求的字面语言无实质区别的等效结构元素,则这样的其他示例意图在权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。