avs3帧内预测模式粗选方法、系统及介质
技术领域
1.本技术属于数字视频编解码技术领域,具体地,涉及一种avs3帧内预测模式粗选方法、系统及介质。
背景技术:
2.为了适应高速发展的数字电视广播等媒体对视频图像压缩传输的高标准需求,信源编码标准avs(audio video coding standard)应运而生。其中,帧内预测是消除控件冗余的关键技术,它充分利用图像的空间相关性进行预测编码,引入率失真优化技术rdo(rate distortion optimization)进行最优模式的选择,提高了视频编码的压缩效率以及编码性能。
3.帧内预测模式通过计算每一种帧内预测模式的率失真代价,找出其中最小代价的预测模式作为最佳预测模式,但是,这样大大增加了编码器的计算复杂度,很难适应实时性要求高的场合。
4.avs3相比avs2,加入了很多新技术,在代码实现上有很大的提升。avs3中将最大的编码单元lcu(largest code unit)的尺寸从64x64扩展到了128x128,并且引入了二叉树bt(binary tree)和扩展二叉树eqt的编码单元划分模式,使得帧内编码的复杂度急剧增加。另外,帧内预测单元pu(prediction unit)还引入了帧内衍生模式,除了之前的nxn、2nx2n这样的传统正方形pu划分和avs2中原有的2n x 0.5n、0.5n x 2n非正方形pu划分,还引入了2nx(n/2) 2nx(3n/2)、2nx(3n/2) 2nx(n/2)、(n/2)x2n (3n/2)x2n、(3n/2)x2n (n/2)x2n等四种非正方形划分,进一步增加了帧内编码的复杂度。不仅如此,粗略的模式决策rmd(roughmode decision)过程还增加了帧内预测滤波等步骤,进一步增加计算复杂度。
5.而为了满足目前数字视频的通讯实行性等高要求,需要新的帧内预测模式粗选方案降低帧内模式决策的运算复杂度。
技术实现要素:
6.本发明提出的avs3帧内预测模式粗选方法、系统及介质,降低了帧内模式决策的运算复杂度,提高了视频通讯实时性。
7.根据本技术实施例的第一个方面,提供了一种avs3帧内预测模式粗选方法方法,具体包括以下步骤:
8.获取用于帧内预测的图像像素;
9.将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;
10.遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;
11.拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;其中,预测块由多个第一预测单元拼接构成;
12.遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代
价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
13.在本技术一些实施方式中,第一预测单元为4x4子块。
14.在本技术一些实施方式中,遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价,具体包括:
15.遍历编码单元中所有的4x4子块,根据预测像素,计算每一个4x4子块的率失真代价并保存。
16.在本技术一些实施方式中,拼接多个第一预测单元的率失真代价,得到预测块的率失真代价,预测块d(x,y)的率失真代价的计算公式为:
[0017][0018]
其中,w和h分别为预测块的宽和高,w和h分别为4x4子块的宽和高,(x,y)为相应块坐标。
[0019]
在本技术一些实施方式中,将图像像素对应的编码单元划分为多个预测块,具体包括:将编码单元按照不划分模式、二叉树划分模式和/或扩展二叉树划分模式,划分为多个预测块。
[0020]
在本技术一些实施方式中,得到每一个预测块的粗模式决策候选列表之后,还包括:
[0021]
将粗模式决策候选列表的多个预测块按照尺寸大小进行分类,并按照尺寸大小进行排列。
[0022]
在本技术一些实施方式中,得到每一个预测块的粗模式决策候选列表之前,还包括:
[0023]
选取每一个预测块对应的n个前面排列的帧内预测模式,形成编码单元的粗模式决策候选列表。
[0024]
根据本技术实施例的第二个方面,提供了一种avs3帧内预测模式粗选系统,具体包括:
[0025]
图像获取模块:获取用于帧内预测的图像像素;
[0026]
编码划分模块:用于将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;
[0027]
第一代价模块:用于遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;
[0028]
预测块代价模块:用于拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;其中,预测块由多个第一预测单元拼接构成;
[0029]
帧内预测模式粗选模块:用于遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0030]
根据本技术实施例的第三个方面,提供了一种avs3帧内预测模式粗选设备,包括:
[0031]
存储器:用于存储可执行指令;以及
[0032]
处理器:用于与存储器连接以执行可执行指令从而完成avs3帧内预测模式粗选方
法。
[0033]
根据本技术实施例的第四个方面,提供了一种计算机可读存储介质,其上存储有计算机程序;计算机程序被处理器执行以实现avs3帧内预测模式粗选方法。
[0034]
采用本技术的avs3帧内预测模式粗选方法、系统及介质,获取用于帧内预测的图像像素;将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0035]
本技术采用小尺寸子块的率失真代价拼凑,得到大尺寸预测单元对应的代价,代替了大尺寸预测单元的代价复杂计算,大大降低了帧内模式决策的运算复杂度,提高了通讯实行性。
附图说明
[0036]
此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
[0037]
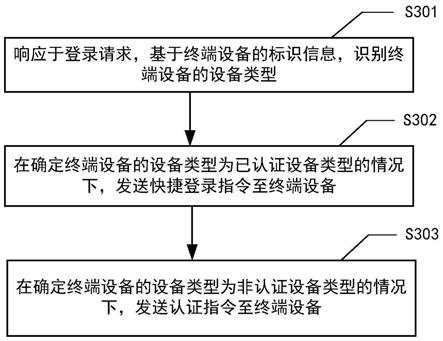
图1中示出了根据本技术实施例的avs3帧内预测模式粗选方法的步骤示意图;
[0038]
图2中示出了根据本技术实施例的avs3帧内预测模式粗选方法的流程示意图;
[0039]
图3中示出了根据本技术实施例的4x4子块算法流程图;
[0040]
图4中示出了根据本技术实施例的avs3帧内预测模式粗选系统的结构示意图;
[0041]
图5中示出了根据本技术实施例的avs3帧内预测模式粗选设备的结构示意图。
具体实施方式
[0042]
在实现本技术的过程中,发明人发现avs3相比avs2,在代码实现上有很大的提升。但是同时大大增加了编码器的计算复杂度,很难适应实时性要求高的场合。
[0043]
为了满足目前数字视频的通讯实行性的高要求,本技术提出了针对avs3的快速帧内模式粗选算法。
[0044]
具体的,
[0045]
本技术的avs3帧内预测模式粗选方法、系统及介质,获取用于帧内预测的图像像素;将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0046]
本技术采用小尺寸子块的率失真代价拼凑,得到大尺寸预测单元对应的代价,代替了大尺寸预测单元的代价复杂计算,大大降低了帧内模式决策的运算复杂度,提高了通讯实行性。
[0047]
为了使本技术实施例中的技术方案及优点更加清楚明白,以下结合附图对本技术的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本技术的一部分实施
例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0048]
实施例1
[0049]
图1中示出了根据本技术实施例的avs3帧内预测模式粗选方法的步骤示意图。图2中示出了根据本技术实施例的avs3帧内预测模式粗选方法的流程示意图。
[0050]
本技术针对avs3的快速帧内模式粗选算法主要包括两部分,分别是基于4x4子块算法的率失真(sum of absolute transformed difference)代价拼接以及基于预测块尺寸的rmd候选列表构建。
[0051]
其整体流程图如图2所示,首先,获取帧内预测需要的参考图像像素;获取之后,计算最大的编码单元lcd(largest code unit)中,所有4x4预测单元pu的率失真代价;
[0052]
本技术考虑到对所有预测单元pu的代价进行计算过于复杂,因此采用计算小尺寸预测单元的代价,通过拼接求和得到大尺寸预测单元pu的代价。
[0053]
计算完所有尺寸的代价后,按照代价从小到大对各个预测单元pu帧内预测模式进行排序,根据不同的预测块尺寸大小选择不同的帧内预测模式个数,进入下一步的rdo过程,最后得到rmd候选列表进行输出。
[0054]
如图1所示,本技术实施例的avs3帧内预测模式粗选方法,具体包括以下步骤:
[0055]
根据本技术实施例的第一个方面,提供了一种avs3帧内预测模式粗选方法方法,具体包括以下步骤:
[0056]
s101:获取用于帧内预测的图像像素。
[0057]
s102:将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成。
[0058]
具体的,将编码单元lcu通过划分模式划分为多个预测块,划分模式具体包括:不划分模式、二叉树划分模式和/或扩展二叉树划分模式。
[0059]
s103:遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价。
[0060]
具体的,第一预测单元为4x4子块。
[0061]
具体包括:遍历编码单元中所有的4x4子块,根据预测像素,计算每一个4x4子块的率失真代价并保存。
[0062]
s104:拼接多个第一预测单元的率失真代价,得到多个预测块的率失真代价。其中,预测块由多个第一预测单元拼接构成。
[0063]
根据avs3编码特性分析,由于其划分模式和帧内预测模式过多,若采用最初原始的算法将给编码器带来不可接受的计算复杂度,不能满足实时性要求。基于此,本技术具体采用计算4x4子块的率失真代价拼凑大尺寸预测单元pu的代价的算法,以减小rmd过程的计算复杂度。
[0064]
因此,本技术中所有尺寸预测单元pu的代价均为小尺寸预测单元pu代价拼凑而来。
[0065]
图3中示出了根据本技术实施例的4x4子块算法流程图。
[0066]
如图3所示,展示了4x4子块算法流程。
[0067]
具体的,首先遍历lcu中全部的4x4子块,获取预测像素后,根据率失真代价计算公
式,计算得到4x4编码子块的代价。具体代价计算过程属于本领域常规算法,此处不再赘述。
[0068]
之后,遍历所有预测块,通过拼接小尺寸子块的代价得到每一个预测块的代价,最小的子块为4x4子块。以计算大尺寸预测块为8x4子块和4x8子块为例,仅需先计算4x4子块的代价,然后相加得到。
[0069]
拼接多个4x4子块的率失真代价,得到预测块的率失真代价,预测块d(x,y)的率失真代价的计算公式为:
[0070][0071]
其中,w和h分别为预测块的宽和高,w和h分别为4x4子块的宽和高,(x,y)为相应块坐标。
[0072]
一个64x64的预测块中共有256个4x4子块pu,由于粗模式决策模块是lcu级的模块,并不需要使用z行扫描的方式进行计算和存储。对256个预测块的计算先按行计算,按照从前往后,从左到右的计算方式进行,即光栅扫描方式。
[0073]
对于4x4子块的计算依然采用计算绝对误差和的方式。虽然在此计算4x4预测单元的代价,但由于划分模式中取消了4x4划分,但并不会根据代价来得到关于4x4 pu的rmd候选列表。
[0074]
如表1大尺寸预测单元拼接方式所示,每一块大尺寸pu均使用两块子块来拼接,其中父块即大尺寸预测块,子块即4x4子块。根据公式(1),哈达码的计算简化为两个子块哈达码的和。如一块4x8和8x4使用两块4x4拼接,4x16使用两块4x8,16x4使用两块8x4。
[0075]
表1 大尺寸预测单元拼接方式
[0076]
父块子块4x84x48x44x44x164x816x48x48x84x84x324x1632x416x48x164x1616x816x48x324x3232x832x416x168x168x648x3264x832x816x328x3232x1632x816x648x64
64x1664x832x3216x3232x6416x6464x3264x1664x6432x64
[0077]
s105:遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0078]
具体的,得到每一个预测块的粗模式决策候选列表之后,还包括:
[0079]
将粗模式决策候选列表的多个预测块按照尺寸大小进行分类,并按照尺寸大小进行排列。
[0080]
在本技术一些实施方式中,得到每一个预测块的粗模式决策候选列表之前,还包括:
[0081]
选取每一个预测块对应的n个前面排列的帧内预测模式,形成编码单元的粗模式决策候选列表。n的数值根据预测块尺寸大小进行自定义,一般情况下,尺寸越大的预测块,其对应的帧内预测模式数目越多。
[0082]
具体的,本实施例中,avs3标准中通过计算得到rmd候选列表的个数,共有从0到5种候选模式。
[0083]
对于rmd候选列表中的帧内预测模式,越在候选列表的前面,其代价值越低,其被选中为最优帧内预测模式的概率越大。
[0084]
如表2所示,为了平衡性能与复杂度,经过大量实验本文确定相应划分模式下对应的rmd候选模式数量。
[0085]
其中,ns表示不划分,bt表示二叉树划分,eqt表示扩展二叉树划分。对于8x8尺寸,所有的划分模式均有5个候选模式,对于其他对称尺寸,不划分有3种候选模式,划分后的小尺寸有两种候选模式。
[0086]
表2 pu尺寸与候选模式数目
[0087][0088]
采用本实施例的avs3帧内预测模式粗选方法,获取用于帧内预测的图像像素;将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0089]
本技术采用小尺寸子块的率失真代价拼凑,得到大尺寸预测单元对应的代价,代替了大尺寸预测单元的代价复杂计算,大大降低了帧内模式决策的运算复杂度,提高了通讯实行性。
[0090]
实施例2
[0091]
本实施例提供了一种avs3帧内预测模式粗选系统,对于本实施例的avs3帧内预测模式粗选系统中未披露的细节,请参照其它实施例中的avs3帧内预测模式粗选方法的具体实施内容。
[0092]
图4中示出了根据本技术实施例的avs3帧内预测模式粗选系统的结构示意图。
[0093]
如图4所示,本技术实施例的avs3帧内预测模式粗选系统,具体包括图像获取模块10、编码划分模块20、第一代价模块30、预测块代价模块40以及帧内预测模式粗选模块30。
[0094]
具体的,
[0095]
图像获取模块10:获取用于帧内预测的图像像素。
[0096]
编码划分模块20:用于将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成。
[0097]
具体的,将编码单元lcu通过划分模式划分为多个预测块,划分模式具体包括:不划分模式、二叉树划分模式和/或扩展二叉树划分模式。
[0098]
第一代价模块30:用于遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价。
[0099]
具体的,第一预测单元为4x4子块。
[0100]
具体包括:遍历编码单元中所有的4x4子块,根据预测像素,计算每一个4x4子块的率失真代价并保存。
[0101]
预测块代价模块40:用于拼接多个第一预测单元的率失真代价,得到预测块的率失真代价。
[0102]
根据avs3编码特性分析,由于其划分模式和帧内预测模式过多,若采用最初原始的算法将给编码器带来不可接受的计算复杂度,不能满足实时性要求。基于此,本技术具体采用计算4x4子块的率失真代价拼凑大尺寸预测单元pu的代价的算法,以减小rmd过程的计算复杂度。
[0103]
因此,本技术中所有尺寸预测单元pu的代价均为小尺寸预测单元pu代价拼凑而来。
[0104]
图3中示出了根据本技术实施例的4x4子块算法流程图。
[0105]
如图3所示,展示了4x4子块算法流程。
[0106]
具体的,首先遍历lcu中全部的4x4子块,获取预测像素后,根据率失真代价计算公式,计算得到4x4编码子块的代价。具体代价计算过程属于本领域常规算法,此处不再赘述。
[0107]
之后,遍历所有预测块,通过拼接小尺寸子块的代价得到每一个预测块的代价,最小的子块为4x4子块。以计算大尺寸预测块为8x4子块和4x8子块为例,仅需先计算4x4子块的代价,然后相加得到。
[0108]
拼接多个4x4子块的率失真代价,得到预测块的率失真代价,预测块d(x,y)的率失真代价的计算公式为:
[0109][0110]
其中,w和h分别为预测块的宽和高,w和h分别为4x4子块的宽和高,(x,y)为相应块坐标。
[0111]
帧内预测模式粗选模块50:用于遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0112]
具体的,得到每一个预测块的粗模式决策候选列表之后,还包括:
[0113]
将粗模式决策候选列表的多个预测块按照尺寸大小进行分类,并按照尺寸大小进行排列。
[0114]
在本技术一些实施方式中,得到每一个预测块的粗模式决策候选列表之前,还包括:
[0115]
选取每一个预测块对应的n个前面排列的帧内预测模式,形成编码单元的粗模式决策候选列表。n的数值根据预测块尺寸大小进行自定义,一般情况下,尺寸越大的预测块,其对应的帧内预测模式数目越多。
[0116]
采用本实施例的avs3帧内预测模式粗选系统,图像获取模块10获取用于帧内预测的图像像素;编码划分模块20将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;第一代价模块30遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;预测块代价模块40拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;帧内预测模式粗选模块30遍历全部帧内预测模式后,得
到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0117]
本技术采用小尺寸子块的率失真代价拼凑,得到大尺寸预测单元对应的代价,代替了大尺寸预测单元的代价复杂计算,大大降低了帧内模式决策的运算复杂度,提高了通讯实行性。
[0118]
实施例3
[0119]
本实施例提供了一种avs3帧内预测模式粗选设备,对于本实施例的avs3帧内预测模式粗选设备中未披露的细节,请参照其它实施例中的avs3帧内预测模式粗选方法或系统具体的实施内容。
[0120]
图5中示出了根据本技术实施例的avs3帧内预测模式粗选设备400的结构示意图。
[0121]
如图5所示,avs3帧内预测模式粗选设备400,包括:
[0122]
存储器402:用于存储可执行指令;以及
[0123]
处理器401:用于与存储器402连接以执行可执行指令从而完成运动矢量预测方法。
[0124]
本领域技术人员可以理解,示意图5仅仅是avs3帧内预测模式粗选设备400的示例,并不构成对avs3帧内预测模式粗选设备400的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件,例如avs3帧内预测模式粗选设备400还可以包括输入输出设备、网络接入设备、总线等。
[0125]
所称处理器401(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现场可编程门阵列(field
‑
programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器401也可以是任何常规的处理器等,处理器401是avs3帧内预测模式粗选设备400的控制中心,利用各种接口和线路连接整个avs3帧内预测模式粗选设备400的各个部分。
[0126]
存储器402可用于存储计算机可读指令,处理器401通过运行或执行存储在存储器402内的计算机可读指令或模块,以及调用存储在存储器402内的数据,实现avs3帧内预测模式粗选设备400的各种功能。存储器402可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据avs3帧内预测模式粗选设备400使用所创建的数据等。此外,存储器402可以包括硬盘、内存、插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、只读存储器(read
‑
only memory,rom)、随机存取存储器(random access memory,ram)或其他非易失性/易失性存储器件。
[0127]
avs3帧内预测模式粗选设备400集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机可读指令来指令相关的硬件来完成,的计算机可读指令可存储于一计算机可读存储介质中,该计算机可读指令在被处理器执行时,可实现上述各个方法实施例的步骤。
[0128]
实施例4
[0129]
本实施例提供了一种计算机可读存储介质,其上存储有计算机程序;计算机程序被处理器执行以实现其他实施例中的avs3帧内预测模式粗选方法。
[0130]
本技术实施例的avs3帧内预测模式粗选设备及存储介质,获取用于帧内预测的图像像素;将图像像素对应的编码单元划分为多个预测块,每一个预测块由多个第一预测单元拼接而成;遍历编码单元中全部的第一预测单元,计算每一个第一预测单元的率失真代价;拼接多个第一预测单元的率失真代价,得到预测块的率失真代价;遍历全部帧内预测模式后,得到每一个预测块的多个率失真代价,按照率失真代价的大小,从小向大将每一个预测块对应的帧内预测模式进行排列,得到编码单元的粗模式决策候选列表。
[0131]
本技术采用小尺寸子块的率失真代价拼凑,得到大尺寸预测单元对应的代价,代替了大尺寸预测单元的代价复杂计算,大大降低了帧内模式决策的运算复杂度,提高了通讯实行性。
[0132]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0133]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0134]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0135]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0136]
在本发明使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
[0137]
应当理解,尽管在本发明可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
[0138]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
[0139]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。