1.本发明涉及相机参数标定的技术领域,尤其涉及一种手术导航中单目相机内外参动态标定方法,以及手术导航中单目相机内外参动态标定装置,主要用于特定目标的跟踪和增强现实领域。
背景技术:
2.当前,在基于相机的目标跟踪与检测、三维重建、增强现实等领域,相机的内外参和畸变参数的获取是进行这些操作的前提条件。相机标定的一般方法是基于棋盘格的张氏标定法,在已知棋盘格角点的物理坐标后,利用对图像的角点检测算法可实现对相机内外参和畸变参数的求解。但这种方法需要引入外部辅助标记棋盘格,在相机内参变化时(例如相机焦距变化)需要重新利用棋盘格对相机进行标定,这样大大降低了相机在有关应用领域的效率和实时性。
技术实现要素:
3.为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种手术导航中单目相机内外参动态标定方法,其能够大大提升相机在特定目标的跟踪和增强现实领域的效率和实时性,既可以对增强现实的误差进行实时校正,也可以对目标的跟踪误差进行实时校正,应用前景广泛。
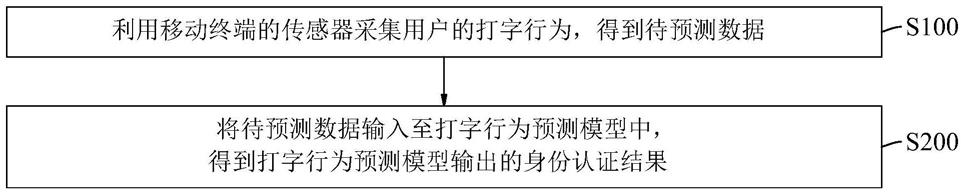
4.本发明的技术方案是:这种手术导航中单目相机内外参动态标定方法,其包括以下步骤:
5.(1)将单目相机拍摄的视频流分解为单帧图像;
6.(2)识别每帧图像在像素空间的标志矩形框范围,并利用目标特征区域划分对像素空间的标志矩形框排序;
7.(3)将各矩形框内像素点进行阈值分割,获取矩形框中心点在像素空间的坐标值;
8.(4)在光学跟踪系统下计算目标的特征框中心标志点的物理坐标,使标志点的像素坐标与物理坐标一一对应;
9.(5)利用公式(1)对每帧图像进行相机标定,求解相机的内外参矩阵和畸变参数
[0010][0011]
其中,s:尺度,u,v:像素坐标,fx,fy:相机焦距,cx,cy:相机主点坐标,r11
‑
r33:9个元素组成相机外参的旋转部分,t1,t2,t3:相机外参的平移部分,xw,yw,zw:与像素坐标点对应的3维点。
[0012]
本发明通过对单目相机的视频流进行逐帧分解,识别每张图片像素空间标志矩形框的坐标可以构建与物理空间中标志矩形框的一一对应关系,从而对每帧图片进行快速标
定以获取相机内外参和畸变参数,由于每帧图片由视频流分解而来,故相机的标定是一个动态的过程,能够大大提升相机在特定目标的跟踪和增强现实领域的效率和实时性,既可以对增强现实的误差进行实时校正,也可以对目标的跟踪误差进行实时校正,应用前景广泛。
[0013]
还提供了手术导航中单目相机内外参动态标定装置,其包括:
[0014]
分解模块,其配置来将单目相机拍摄的视频流分解为单帧图像;
[0015]
排序模块,其配置来识别每帧图像在像素空间的标志矩形框范围,并利用目标特征区域划分对像素空间的标志矩形框排序;
[0016]
分割模块,其配置来将各矩形框内像素点进行阈值分割,获取矩形框中心点在像素空间的坐标值;
[0017]
对应模块,其配置来在光学跟踪系统下计算目标的特征框中心标志点的物理坐标,使标志点的像素坐标与物理坐标一一对应;
[0018]
标定模块,其配置来利用相机成像的坐标转换公式对每帧图像进行相机标定,求解相机的内外参矩阵和畸变参数。
附图说明
[0019]
图1是根据本发明的手术导航中单目相机内外参动态标定方法的流程图。
[0020]
图2是根据本发明的手术导航中单目相机内外参动态标定方法的一个具体实施例的流程图。
具体实施方式
[0021]
如图1所示,这种手术导航中单目相机内外参动态标定方法,其包括以下步骤:
[0022]
(1)将单目相机拍摄的视频流分解为单帧图像;
[0023]
(2)识别每帧图像在像素空间的标志矩形框范围,并利用目标特征区域划分对像素空间的标志矩形框排序;
[0024]
(3)将各矩形框内像素点进行阈值分割,获取矩形框中心点在像素空间的坐标值;
[0025]
(4)在光学跟踪系统下计算目标的特征框中心标志点的物理坐标,使标志点的像素坐标与物理坐标一一对应;
[0026]
(5)利用公式(1)对每帧图像进行相机标定,求解相机的内外参矩阵和畸变参数
[0027][0028]
其中,s:尺度,u,v:像素坐标,fx,fy:相机焦距,cx,cy:相机主点坐标,r11
‑
r33:9个元素组成相机外参的旋转部分,t1,t2,t3:相机外参的平移部分,xw,yw,zw:与像素坐标点对应的3维点。
[0029]
本发明通过对单目相机的视频流进行逐帧分解,识别每张图片像素空间标志矩形框的坐标可以构建与物理空间中标志矩形框的一一对应关系,从而对每帧图片进行快速标定以获取相机内外参和畸变参数,由于每帧图片由视频流分解而来,故相机的标定是一个
动态的过程,能够大大提升相机在特定目标的跟踪和增强现实领域的效率和实时性,既可以对增强现实的误差进行实时校正,也可以对目标的跟踪误差进行实时校正,应用前景广泛。
[0030]
优选地,在所述步骤(1)之前执行:在特定目标上粘贴若干显著性标志矩形框,对显著性标志矩形框构建物理空间的坐标系p,并在光学跟踪系统下计算每一个显著性标志矩形框中心点的物理坐标。显著性标志矩形框与特定目标区别较大(颜色或形状),可以在图像中被快速识别。
[0031]
优选地,所述步骤(2)中,每帧图像在像素空间识别标志矩形框的范围像素坐标,若标志矩形框被成功检测到,则利用目标的特征区域划分对像素空间的标志矩形框进行排序;若该帧图像的标志矩形框均检测失败,则舍弃当前帧的相机标定,对下一帧图像进行标定。
[0032]
优选地,所述步骤(5)中,若停止标定,则标定流程结束;若不停止标定,则对下一帧图像进行标定。
[0033]
图2给出了一个具体实施例的流程图。该方法包括以下步骤:
[0034]
s101,在特定目标上粘贴若干显著性标志矩形框;
[0035]
显著性标志矩形框与特定目标区别较大(颜色或形状),可以在图像中被快速识别。
[0036]
s102,对标志矩形框构建物理空间的坐标系p,并在光学跟踪系统下计算每一个标志矩形框中心点的物理坐标。
[0037]
s103,单目相机拍摄特定目标的视频流,对视频流分解为单帧图像。
[0038]
s104,每帧图像在像素空间识别标志矩形框的范围像素坐标。
[0039]
s105,若标志矩形框被成功检测到,则利用目标的特征区域划分对像素空间的标志矩形框进行排序。若该帧图像的标志矩形框均检测失败,则舍弃当前帧的相机标定,对下一帧图像进行标定。
[0040]
s106,对检测到的矩形框利用灰度值差异进行阈值分割,提取矩形框中心点的像素坐标。
[0041]
s107,对可以进行标定的图像构建基于标志矩形框中心点的相机标定方程。
[0042]
s108,对标定方程求解以获取相机的内外参矩阵和畸变参数。
[0043]
s109,若停止标定,则标定流程结束。若不停止标定,则对下一帧图像进行标定。
[0044]
本领域普通技术人员可以理解,实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,该程序在执行时,包括上述实施例方法的各步骤,而所述的存储介质可以是:rom/ram、磁碟、光盘、存储卡等。因此,与本发明的方法相对应的,本发明还同时包括一种手术导航中单目相机内外参动态标定装置,该装置通常以与方法各步骤相对应的功能模块的形式表示。该装置包括:
[0045]
分解模块,其配置来将单目相机拍摄的视频流分解为单帧图像;
[0046]
排序模块,其配置来识别每帧图像在像素空间的标志矩形框范围,并利用目标特征区域划分对像素空间的标志矩形框排序;
[0047]
分割模块,其配置来将各矩形框内像素点进行阈值分割,获取矩形框中心点在像
素空间的坐标值;
[0048]
对应模块,其配置来在光学跟踪系统下计算目标的特征框中心标志点的物理坐标,使标志点的像素坐标与物理坐标一一对应;
[0049]
标定模块,其配置来利用相机成像的坐标转换公式对每帧图像进行相机标定,求解相机的内外参矩阵和畸变参数。
[0050]
优选地,该装置还包括构建模块,其在所述分解模块之前执行:在特定目标上粘贴若干显著性标志矩形框,对显著性标志矩形框构建物理空间的坐标系p,并在光学跟踪系统下计算每一个显著性标志矩形框中心点的物理坐标。
[0051]
优选地,所述排序模块中,每帧图像在像素空间识别标志矩形框的范围像素坐标,若标志矩形框被成功检测到,则利用目标的特征区域划分对像素空间的标志矩形框进行排序;若该帧图像的标志矩形框均检测失败,则舍弃当前帧的相机标定,对下一帧图像进行标定。
[0052]
优选地,所述标定模块中,若停止标定,则标定流程结束;若不停止标定,则对下一帧图像进行标定。
[0053]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。