1.本发明涉及农业测控技术,特别是一种适用于播种作业过程的小粒种子动态跟踪自适应补种测控装置及方法。
背景技术:
2.我国小粒径种子作物种类繁多,种植面积广泛,产业价值持续提高,在我国作物种植中有着重要的地位,具有非常广阔的发展前景。小粒径种子播种是种植的主要工序,在保证匹配施肥播种机器作业进度的过程中,要高效低损均匀地补种,并采用补种装置将种子逐一输送到施肥播种机的各个种箱中,致使有效提升播种施肥的工作进程,确保其高效率、持续性的正常工作。
3.现阶段学者对施肥播种方面进行了大量研究,取得了较好成果,但在小粒种子动态跟踪补种方面甚少研究,基本上采用人工或半机械化的方式,难以匹配播种施肥机器作业进度,直接影响施肥播种工作进程,存着生产效率低、劳动强度大、作业成本高等问题,并且其机械化程度不高已经成为制约小粒径种子作物产业化发展亟待解决的问题。
4.目前,补种装置主要依靠人工经验,调节相应的机构工作参数,准确性和实时性较低,另外,由于无法实时检测补种装置的实际工作参数,对驱动电机的调节量无法准确把握,进而无法建立基于反馈的补种工作参数自动调节装置,补种自动化程度较低。因此,以匹配播种施肥机作业效率为要求,融入监测技术,开发控制装置,根据检测补种装置的实际工作参数,实时调节驱动电机,使补种装置以优化的工作参数组合自动完成补种过程,保证高效、低损、均匀地自动补种是未来小粒种子动态跟踪补种技术的重要研究方向。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种适用于播种作业过程的小粒种子动态跟踪自适应补种测控装置及方法。
6.为了实现上述目的,本发明提供了一种小粒种子动态跟踪自适应补种测控装置,设置在小粒种子补种装置上,其中,所述小粒种子动态跟踪自适应补种测控装置包括:
7.速度传感器,用于检测所述小粒种子补种装置的卸种机构、风机、叶片旋转机构以及连杆调节机构曲柄的速度参数;
8.超声波接近传感器,用于检测所述小粒种子补种装置的试验种箱和施肥播种机的种箱余量;
9.气流速度传感器,用于检测所述小粒种子补种装置的输送管道和各补种单元的入口气流速度参数;
10.倾角传感器,用于检测所述小粒种子补种装置的补种管道的壳体和所述施肥播种机的种箱的水平倾斜角度参数;
11.流量传感器,用于检测各所述补种单元的小粒径种子流量;
12.工业相机,用于识别所述施肥播种机的种箱位置;
13.驱动电机,用于驱动所述卸种机构、风机、叶片旋转机构以及连杆调节机构执行动作;以及
14.工控机,所述速度传感器、超声波接近传感器、气流速度传感器、倾角传感器、流量传感器和工业相机分别与所述工控机的输入端连接,所述驱动电机与所述工控机的输出端连接。
15.上述的小粒种子动态跟踪自适应补种测控装置,其中,所述速度传感器包括第一速度传感器、第二速度传感器、第三速度传感器和第四速度传感器,分别对应安装在所述卸种机构、风机、叶片旋转机构的转轴和连杆调节机构的曲柄转轴上。
16.上述的小粒种子动态跟踪自适应补种测控装置,其中,所述超声波接近传感器包括第一超声波接近传感器和第二超声波接近传感器,所述第一超声波接近传感器安装在距离所述小粒种子补种装置的试验种箱底部x1处,安装距离x1取决于所述卸种机构的卸种能力、补种时间和临界测距反应距离;所述第二超声波接近传感器安装在距离所述施肥播种机的种箱底部x2处,安装距离x2取决于叶片旋转机构补种能力、补种时间和临界测距反应距离。
17.上述的小粒种子动态跟踪自适应补种测控装置,其中,所述安装距离x1为:
[0018][0019]
其中q1为叶轮式卸种机构卸种能力,单位为kg/s,t1为小粒径种子补种的时间,单位为s,s1为所述试验种箱的横截面面积,单位为m2,λ为填充系数,ρ为小粒径种子密度,单位为kg/m3;x1为小粒种子补种装置的试验种箱临界测距反应距离,单位为m;
[0020]
所述安装距离x2为:
[0021]
其中q2为叶片旋转机构的补种能力,单位为kg/s,t2为小粒径种子补种的时间,单位为s,s2为施肥播种机的种箱横截面面积,单位为m2,λ为填充系数,ρ为小粒径种子密度,单位为kg/m3,x2为施肥播种机的种箱临界测距反应距离,单位为m。
[0022]
上述的小粒种子动态跟踪自适应补种测控装置,其中,所述驱动电机包括步进电机和直流电机,所述步进电机包括叶轮式卸种电机、叶片旋转电机、旋转法兰电机、连杆调节电机,分别对应与所述卸种机构、叶片旋转机构、旋转法兰及连杆调节机构的曲柄转轴连接;所述直流电机与所述风机的驱动转轴连接。
[0023]
上述的小粒种子动态跟踪自适应补种测控装置,其中,所述工控机安装在机架上,包括显示屏、键盘、plc、检测与控制电路和显示电路,所述键盘的输出端与所述plc的输入端连接,所述plc的输出端与所述显示电路的输入端连接,所述显示电路的输出端与所述显示屏连接。
[0024]
上述的小粒种子动态跟踪自适应补种测控装置,其中,所述键盘用于设置所述小粒种子补种装置的试验种箱内小粒径种子报警余量值、施肥播种机的种箱内小粒径种子余量报警值及所述步进电机和直流电机的转速;所述显示屏用于显示所述键盘设置的各数值和所述速度传感器、超声波接近传感器、气流速度传感器、倾角传感器及流量传感器的检测值。
[0025]
上述的小粒种子动态跟踪自适应补种测控装置,其中,所述风机产生的最小气流
速度v
a
=kv
f
,其中,k为经验系数,v
f
为小粒径种子的悬浮速度。
[0026]
上述的小粒种子动态跟踪自适应补种测控装置,其中,所述气流速度传感器分别安装在输送管道、补种管道壳体的内壁表面上;所述倾角传感器分别安装在所述补种管道壳体和施肥播种机的种箱外壁表面上;所述流量传感器分别安装在所述补种单元的内壁表面上;所述工业相机安装在所述补种管道的壳体上;
[0027]
为了更好地实现上述目的,本发明还提供了一种小粒种子动态跟踪自适应补种测控方法,其中,包括如下步骤:
[0028]
s100、采用超声波测距方式判断施肥播种机的种箱内的小粒径种子余量,若所述种箱内的小粒径种子余量不足,向工控机发送指令,提示小粒种子补种装置给施肥播种机补种,所述小粒种子补种装置各工作部件相应电机动作;
[0029]
s200、通过倾角传感器检测所述小粒种子补种装置的补种管道壳体和所述施肥播种机的种箱水平倾斜角度大小;并采用工业相机识别所述种箱位置,实时调整所述小粒种子补种装置的输送管道方向和高度及补种单元位置,实现各所述补种单元与各所述种箱的精准对接;
[0030]
s300、采用超声波测距方式判断所述小粒种子补种装置的试验种箱内的小粒径种子余量,若所述试验种箱内的小粒径种子余量充足,则所述小粒种子补种装置的风机开始工作,否则工控机及时发出报警;
[0031]
s400、通过气流速度传感器检测所述小粒种子补种装置的最末一个补种单元的气流速度大于所述风机产生的最小气流速度,则所述小粒种子补种装置的卸种机构开始卸种;
[0032]
s500、根据流量传感器检测所述小粒种子补种装置的补种管道的小粒径种子流量和超声波接近传感器测得所述试验种箱的余量,向工控机发送指令,自动调控所述卸种机构、风机和叶片旋转机构的转速到优化工作参数组合;以及
[0033]
s600、所述施肥播种机的种箱内的小粒径种子加满时,所述工控机及时发出报警,结束工作。
[0034]
本发明的技术效果在于:
[0035]
本发明可自动调控叶轮式卸种机构、风机、叶片旋转机构的转速,进而补种装置以优化的工作参数组合工作,解决了补种装置存在的自动化程度低、准确性和实时性较低等问题,并且能够自适应不同种箱分布(数量)的小粒径种子施肥播种机补种工作,还具有小粒径种子补种余量检测报警功能,实时显示补种装置的试验种箱内小粒径种子报警余量值、施肥播种机的种箱内小粒径种子余量范围报警值、步进电机和直流电机的转速、传感器的检测值,并且拥有良好的人机交互界面,以方便各种作业参数的设定,保证高效、低损、均匀地自动补种,有效提高施肥播种机的续航时间和路程,以确保其高效率、持续性的正常工作。
[0036]
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
[0037]
图1为本发明一实施例的补种测控装置结构示意图;
[0038]
图2为本发明一实施例的补种装置结构示意图;
[0039]
图3为本发明一实施例的补种管道结构示意图;
[0040]
图4为本发明一实施例的补种单元结构示意图;
[0041]
图5本发明一实施例的补种测控装置工作原理图;
[0042]
图6本发明一实施例的补种测控方法流程图。
[0043]
其中,附图标记:
[0044]
1 机架
[0045]
2 风机
[0046]
3 传动装置
[0047]
4 试验种箱
[0048]
5 卸种机构
[0049]
6 工控机
[0050]
7 输送管道
[0051]
8 补种管道
[0052]
81 补种单元
[0053]
811 叶片旋转机构
[0054]
812 壳体
[0055]
82 连杆调节机构
[0056]
9 小粒种子动态跟踪自适应补种测控装置
[0057]
91 速度传感器
[0058]
911 第一速度传感器
[0059]
912 第二速度传感器
[0060]
913 第三速度传感器
[0061]
914 第四速度传感器
[0062]
92 气流速度传感器
[0063]
921 第一气流速度传感器
[0064]
922 第二气流速度传感器
[0065]
93 超声波接近传感器
[0066]
931 第一超声波接近传感器
[0067]
932 第二超声波接近传感器
[0068]
94 流量传感器
[0069]
95 倾角传感器
[0070]
951 第一倾角传感器
[0071]
952 第二倾角传感器
[0072]
96 直流电机
[0073]
97 工业相机
[0074]
98 步进电机
[0075]
10 种箱
具体实施方式
[0076]
下面结合附图对本发明的结构原理和工作原理作具体的描述:
[0077]
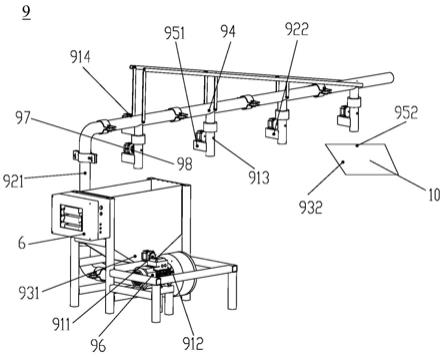
参见图1,图1为本发明一实施例的补种测控装置结构示意图,图中仅示意了本补种测控装置各个组成部件在小粒种子补种装置上的安装位置。本发明的小粒种子动态跟踪自适应补种测控装置9,设置在小粒种子补种装置上,参见图2
‑
图4,图2为本发明一实施例的补种装置结构示意图,图3为本发明一实施例的补种管道结构示意图,图4为本发明一实施例的补种单元结构示意图。本发明的小粒种子补种装置包括机架1和安装在机架1上的风机2、传动装置3、试验种箱4、卸种机构5,以及工控机6,安装在卸种机构5一侧,该卸种机构5优选为叶轮式卸种机构,输送管道7连接补种管道8和试验种箱4,该补种管道8包括多个补种单元81和连杆调节机构82,该补种单元包括壳体812和设置在壳体812内的叶片旋转机构811。该小粒种子动态跟踪自适应补种测控装置9包括:速度传感器91,用于检测所述小粒种子补种装置的卸种机构5、风机2、叶片旋转机构811以及连杆调节机构82的曲柄速度参数;超声波接近传感器93,用于检测所述小粒种子补种装置的试验种箱4和施肥播种机的种箱10余量;气流速度传感器92,用于检测所述小粒种子补种装置的输送管道7和各补种单元81的入口气流速度参数;倾角传感器95,用于检测所述小粒种子补种装置的补种管道壳体812和所述施肥播种机的种箱10的水平倾斜角度参数;流量传感器94,用于检测各所述补种单元81的小粒径种子流量;工业相机97,用于识别所述施肥播种机的种箱10位置;驱动电机,用于驱动所述卸种机构5、风机2、叶片旋转机构811以及连杆调节机构82执行动作;以及工控机6,所述速度传感器91、超声波接近传感器93、气流速度传感器92、倾角传感器95、流量传感器94和工业相机97分别与所述工控机6的输入端连接,所述驱动电机包括步进电机98、直流电机96的输入端与所述工控机6的输出端连接,工控机6通过步进电机98、直流电机96驱动小粒种子动态跟踪补种装置的执行机构动作。
[0078]
本实施例中,所述速度传感器91包括第一速度传感器911、第二速度传感器912、第三速度传感器913和第四速度传感器914,通过安装支架并用螺栓固定,分别对应安装在所述卸种机构5、风机2、叶片旋转机构811的转轴和连杆调节机构82的曲柄转轴上,用于检测叶轮式卸种机构5、风机2、叶片旋转机构811以及连杆调节机构82曲柄的转速。
[0079]
所述超声波接近传感器93包括第一超声波接近传感器931和第二超声波接近传感器932,所述第一超声波接近传感器931通过安装支架并用螺栓固定安装在距离所述小粒种子补种装置的试验种箱4底部x
1 m处,安装距离x1取决于所述卸种机构5的卸种能力、补种时间和临界测距反应距离;所述第二超声波接近传感器932通过安装支架并用螺栓固定安装在距离所述施肥播种机的种箱10底部x
2 m处,安装距离x2取决于叶片旋转机构811补种能力、补种时间和临界测距反应距离。
[0080]
其中,所述安装距离x1为:
[0081][0082]
其中q1为叶轮式卸种机构5卸种能力,单位为kg/s,t1为小粒径种子补种的时间,单位为s,s1为所述试验种箱4的横截面面积,单位为m2,λ为填充系数,ρ为小粒径种子密度,单位为kg/m3;x1为小粒种子补种装置的试验种箱4临界测距反应距离,单位为m;
[0083]
所述安装距离x2为:
[0084]
其中q2为叶片旋转机构811的补种能力,单位为kg/s,t2为小粒径种子补种的时间,单位为s,s2为施肥播种机的种箱横截面面积,单位为m2,λ为填充系数,ρ为小粒径种子密度,单位为kg/m3,x2为施肥播种机的种箱10临界测距反应距离,单位为m。
[0085]
本实施例的驱动电机包括步进电机98和直流电机96,所述步进电机98包括叶轮式卸种电机、叶片旋转电机、旋转法兰电机、连杆调节电机,分别对应与叶轮式卸种机构5、叶片旋转机构811、旋转法兰及连杆调节机构82的曲柄转轴连接;所述直流电机96与所述风机2的驱动转轴连接。
[0086]
其中,所述工控机6安装在机架1上,包括设置于面板上的显示屏、键盘,以及设置于其内部的plc(可编程逻辑控制器)、检测与控制电路和显示电路,所述键盘的输出端与所述plc的输入端连接,所述plc的输出端与所述显示电路的输入端连接,所述显示电路的输出端与所述显示屏连接,plc和检测与控制电路双向通信。可通过所述键盘设置所述小粒种子补种装置的试验种箱4内小粒径种子报警余量值、施肥播种机的种箱10内小粒径种子余量报警范围值及所述步进电机98和直流电机96的转速;可通过所述显示屏显示所述键盘设置的各数值和所述速度传感器91、超声波接近传感器93、气流速度传感器9291、倾角传感器95及流量传感器94的检测值。
[0087]
所述气流速度传感器92包括第一气流速度传感器921和第二气流速度传感器922,分别通过螺栓分别安装在输送管道7、补种管道8的壳体812的内壁表面上,用来检测输送管道7和各个补种单元81入口里的气流速度大小;所述倾角传感器95包括第一倾角传感器951和第二倾角传感器952,分别通过螺栓分别安装在所述补种管道8的壳体812和施肥播种机的种箱10外壁表面上,用来检测补种管道8的壳体812和施肥播种机的种箱10水平倾斜角度大小,检测补种管道8的壳体812和施肥播种机的种箱10表面水平倾斜角度,其表面是平面;所述流量传感器94通过螺栓分别安装在所述补种单元81的内壁表面上,用来检测各个补种单元81的小粒径种子流量,各个补种单元81的流量传感器94和第二气流速度传感器922的安装位置一样;所述工业相机97安装在所述补种管道的壳体812上,用于识别精量播种机的种箱10位置。
[0088]
参见图5,图5本发明一实施例的补种测控装置工作原理图。工作时,装置开机后,根据施肥播种机的种箱大小设置补种装置的试验种箱4内小粒径种子报警余量值、施肥播种机的种箱10内小粒径种子余量报警范围值、以及叶轮式卸种电机、叶片旋转电机、旋转法兰电机、连杆调节电机和直流电机96的转速值;然后通过采用超声波测距方式判断施肥播种机的种箱10内的小粒径种子余量,若种箱10内的小粒径种子余量不足,向工控机6发送指令,提示补种装置需要给施肥播种机补种,则补种装置各工作部件相应电机正常动作。通过倾角传感器95检测补种管道8的壳体812和施肥播种机的种箱10的水平倾斜角度大小,以及工业相机97识别施肥播种机的种箱10的位置,实时调整输送管道7方向和高度、以及补种单元81位置,实现各个补种单元81与施肥播种机各个种箱10的精准对接;通过采用超声波测距方式判断补种装置试验种箱4内的小粒径种子余量,若试验种箱4内的小粒径种子余量充足,风机2开始工作,否则工控机6及时发出报警。再通过气流速度传感器92检测的第四补种单元81的气流速度大于风机2产生的最小气流速度,叶轮式卸种机构5开始进行卸种;再根据流量传感器94检测补种管道8的小粒径种子流量和超声波接近传感器93测得补种装置的
试验种箱4的余量,向工控机6发送指令,自动调控叶轮式卸种机构5、风机2、叶片旋转机构811的转速到优化工作参数组合;最后施肥播种机的种箱10内的小粒径种子加满,则工控机6及时发出报警,结束工作。
[0089]
参见图6,图6本发明一实施例的补种测控方法流程图。本发明的小粒种子动态跟踪自适应补种测控方法,包括如下步骤:
[0090]
步骤s100、采用超声波测距方式判断施肥播种机的种箱10内的小粒径种子余量,若所述种箱10内的小粒径种子余量不足,向工控机6发送指令,提示小粒种子补种装置给施肥播种机补种,所述小粒种子补种装置各工作部件相应电机动作;
[0091]
步骤s200、通过倾角传感器95检测所述小粒种子补种装置的补种管道8的壳体812和所述施肥播种机的种箱10水平倾斜角度大小;并采用工业相机97识别所述种箱10位置,实时调整所述小粒种子补种装置的输送管道7方向和高度及补种单元81位置,实现各所述补种单元81与各所述种箱10的精准对接;
[0092]
步骤s300、采用超声波测距方式判断所述小粒种子补种装置的试验种箱4内的小粒径种子余量,若所述试验种箱4内的小粒径种子余量充足,则所述小粒种子补种装置的风机2开始工作,否则工控机6及时发出报警;
[0093]
步骤s400、通过气流速度传感器92检测所述小粒种子补种装置的最末一个补种单元81的气流速度大于所述风机2产生的最小气流速度,则所述小粒种子补种装置的卸种机构5开始卸种;所述风机2产生的最小气流速度v
a
=kv
f
,其中,k为经验系数,v
f
为小粒径种子的悬浮速度;
[0094]
步骤s500、根据流量传感器94检测所述小粒种子补种装置的补种管道8的小粒径种子流量和超声波接近传感器93测得所述试验种箱4的余量,向工控机6发送指令,自动调控所述卸种机构5、风机2和叶片旋转机构811的转速到优化工作参数组合;以及
[0095]
步骤s600、所述施肥播种机的种箱10内的小粒径种子加满时,所述工控机6及时发出报警,结束工作。
[0096]
本发明小粒种子补种装置的补种单元81数量和分布由施肥播种机的种箱10数量和分布决定,可进行调整,本实施例以4个补种单元81数量,一字排列为例,对本发明的小粒种子动态跟踪自适应补种测控方法进一步予以说明:
[0097]
步骤一:超声波接近传感器93基于非接触式测距原理,判断试验种箱4内的种薯余量,其中测得小粒径种子施肥播种机的种箱10距离大于x2时,工控机6给补种装置发出信号,提示补种装置需要给施肥播种机补种;
[0098]
步骤二:倾角传感器95基于牛顿第二定律的基本理论,检测补种管道8壳体和施肥播种机的种箱10水平倾斜角度大小,分别记为θ1和θ2,然后驱动旋转法兰电机,调整输送管道7方向,使补种管道8的壳体812和施肥播种机的种箱10保持平行,并处于正上方,即θ1=θ2;
[0099]
步骤三:工业相机97识别施肥播种机的种箱10的位置,调整补种单元81的位置,连杆调节电机驱动连杆调节机构82调整各个补种单元81与施肥播种机的种箱10一一对应,然后驱动旋转法兰电机,调整输送管道7的高度,实现各个补种单元81与施肥播种机各个种箱10的精准对接;
[0100]
步骤四:待超声波接近传感器93测得补种装置的试验种箱4距离小于x1时,驱动风
机电机驱动风机2开始工作,同时气流速度传感器92分别检测输送管道7、各个补种单元81入口的气流速度参数,依次记为v1,v
21
、v
22
、v
23
、v
24
,待v1>v
21
>v
22
>v
23
>v
24
>v
a
后,驱动叶轮式卸种电机,叶轮式卸种机构5开始进行卸种,与此驱动叶片旋转电机,叶片旋转机构811也在进行补种;风机2产生的最小气流速度v
a
=kv
f
,其中,k为经验系数,v
f
为小粒径种子的悬浮速度;
[0101]
步骤五:根据流量传感器94检测补种管道8的小粒径种子流量和超声波接近传感器93测得补种装置的试验种箱4的余量,向工控机6发送指令,自动调控叶轮式卸种机构5、风机2、叶片旋转机构811的转速到优化工作参数组合;
[0102]
步骤六:若超声波接近传感器93测得补种装置的试验种箱4距离大于x1时,提示补种,实现试验种箱4内的小粒径种子余量判断,保证补种的稳定性。
[0103]
本发明针对现有技术小粒种子播种作业过程存在的自动化程度低、准确性和实时性较低等问题,采用动态跟踪自适应补种测控技术,可根据实时检测的关键工作参数,自动调控补种装置到优化工作参数组合,极大提升了小粒种子动态跟踪补种自动化水平,实现了高效低损均匀地自动补种,进而有效提高了施肥播种机的续航时间和路程,以确保其高效率、持续性的正常工作,并且能够自适应不同种箱分布(数量)的小粒径种子施肥播种机补种工作。
[0104]
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。