1.本发明涉及图像采集设备技术领域,具体涉及一种物联网图像采集器。
背景技术:
2.物联网是指通过各种信息传感器、射频识别技术、全球定位系统、红外感应器、激光扫描器等各种装置与技术,实时采集任何需要监控、连接、互动的物体或过程,采集其声、光、热、电、力学、化学、生物、位置等各种需要的信息,通过各类可能的网络接入,实现物与物、物与人的泛在连接,实现对物品和过程的智能化感知、识别和管理。物联网是一个基于互联网、传统电信网等的信息承载体,它让所有能够被独立寻址的普通物理对象形成互联互通的网络。
3.物联网在对设备进行连接控制的同时,需要对所控制的对象进行实时的监测,常见的控制的方式,是对需要监控的设备进行视频监控,对于一些小片区范围的设备需要可通过放置固定机位的摄像头实现监控,对于大片区范围的设备运行状态的监控,常常会通过无人机在高空进行巡视监控,但是由于无人机高空巡视图像采集受电池电量影响,不能够长时间监控,且需要频繁更换电池,这样需要配置一定的人员进行维护,图像采集的持续性差。
技术实现要素:
4.为了克服上述的技术问题,本发明的目的在于提供一种物联网图像采集器,这样通过将飞行支架模块和配重摄录模块,使得图像采集器的重心下移,从而能够提高主机体在线缆上移动的稳定性,通过设置夹持传动单元能够对线缆进行夹持,并使得主机体能够沿着线缆移动,这样不需要频繁更换电池,图像采集的持续性强;通过设置气动传动的传动杆一和传动杆二对夹持轮进行驱动,整体结构简单,简单实用,能够有效提高主机体与线缆夹持的牢固性;通过设置可伸缩释放的配重箱结构,有利于降低图像采集器的重心,从而保证设备及采集画面的稳定性。
5.本发明的目的可以通过以下技术方案实现:
6.一种物联网图像采集器,包括主机体,所述主机体的底面开设有倒置y型槽,所述主机体的内部对应倒置y型槽的顶端位置处等距设置有多个用于夹持线缆的夹持传动单元,通过设置夹持传动单元能够对线缆进行夹持,并使得主机体能够沿着线缆移动;
7.所述主机体的底面两侧均固定连接有飞行支架模块,所述飞行支架模块的底部均悬挂连接有配重摄录模块,通过将飞行支架模块和配重摄录模块,使得图像采集器的重心下移,从而能够提高主机体在线缆上移动的稳定性。
8.进一步在于:所述飞行支架模块包括两个与主机体底部侧壁外部固定连接的折架,所述折架的底端固定连接有动力电机,两个所述动力电机之间固定连接有横杆,所述横杆的底面中心位置处固定连接有圆管,所述动力电机的电机轴传动连接有桨叶,通过设置位于主机体下部位置的飞行支架模块能够将重心下移,从而提高图像采集器的稳定性。
9.进一步在于:所述夹持传动单元包括与主机体内顶面固定连接的拱形架,所述拱形架的中部内顶面固定有传动杆一,所述拱形架的两侧内壁均固定连接有传动杆二,所述传动杆一通过气管与传动杆二连通,所述传动杆一和传动杆二的传动端均固定连接有匚型架,所述匚型架的内部转动连接有夹持轮,其中,与传动杆一传动连接的匚型架侧壁固定有步进电机,所述步进电机与邻近位置夹持轮传动连接,通过设置气动传动的传动杆一和传动杆二对夹持轮进行驱动,整体结构简单,简单实用,能够有效提高主机体与线缆夹持的牢固性。
10.进一步在于:所述传动杆一和传动杆二的结构相同,所述传动杆一包括外套管,所述外套管的内部滑动连接有活塞,所述活塞的底部固定有圆杆,圆杆的外壁开设有条形槽,外套管的端部固定有与条形槽滑动的凸块,这样能够限制外套管与圆杆发生相对旋转,所述外套管的顶端固定有连接气管的气嘴,所述外套管与活塞之间设置有功能弹簧;
11.所述传动杆一的功能弹簧为支撑弹簧,通过设置支撑弹簧在不受外力时,能够驱动竖直方向的夹持轮向下移动,所述传动杆二的功能弹簧为拉伸弹簧,通过设置拉伸弹簧能够在竖直方向的夹持轮向下移动时,带动水平方向的夹持轮做背离线缆的运动。
12.进一步在于:所述夹持轮的夹持面向内凹陷,所述夹持轮的材质为橡胶,且夹持轮的夹持面开设有防滑条纹,这样能够提高夹持轮与线缆夹持的紧密型。
13.进一步在于:所述配重摄录模块包括配重箱,所述配重箱的顶面中心位置处开设有插接孔二,所述配重箱的顶面两侧对应动力电机所在位置处开设有插接孔一,所述配重箱的内部对应插接孔一所在位置处固定有收卷电机,所述收卷电机的电机轴传动连接有卷绳轮,所述卷绳轮的外壁缠绕固定有牵引绳的一端,所述牵引绳的贯穿配重箱的顶面与对应位置处的动力电机底部连接,所述插接孔二与圆管之间连接有弹簧管,通过设置弹簧管能够将供电和数据传输的线缆置于其中,在不受外力时,能够自动弯曲收纳,在受外力时,能够提供足够的长度;
14.所述配重箱的底部中心位置处开设有探出孔,所述探出孔内设置有用于图像采集的半球摄录单元。
15.进一步在于:所述半球摄录单元包括与配重箱内底滑动连接的两个支撑柱,所述支撑柱的底部固定连接有支撑底板,两个所述支撑柱的顶部之间固定连接有上连座,所述上连座的底部固定连接有半球摄像头,所述上连座的顶面中心固定有连接座,所述连接座的内部固定有与配重箱内顶连接的复位弹簧,通过设置支撑柱连接半球摄像头的结构,在配重箱与地面接触时,能够将半球摄像头置于其内部,避免半球摄像头出现磨损。
16.进一步在于:两个所述配重箱相对的侧壁内部均嵌入固定有永磁铁,且两个永磁铁的磁性相反,这样两个配重箱可进行吸附,这样构成对线缆环抱的结构,这样在供电不足的情况下,也能将图像采集器固定在线缆上,方便后期援救。
17.进一步在于:所述配重箱的内部嵌入固定有锂电池,通过将锂电池放置在配重箱内部,能够提高图像采集器的稳定性和续航能力。
18.进一步在于:所述主机体的顶面固定连接有传输天线。
19.本发明的有益效果:
20.1、通过将物联网图像采集器的主机体的底面开设有倒置y型槽,并在主机体的内部对应倒置y型槽的顶端位置处等距设置有多个用于夹持线缆的夹持传动单元,然后将主
机体的底面两侧均固定连接有底部均悬挂连接有配重摄录模的飞行支架模块,这样通过将飞行支架模块和配重摄录模块,使得图像采集器的重心下移,从而能够提高主机体在线缆上移动的稳定性,通过设置夹持传动单元能够对线缆进行夹持,并使得主机体能够沿着线缆移动,这样不需要频繁更换电池,图像采集的持续性强;
21.2、通过将夹持传动单元的拱形架中部内顶面固定有传动杆一,在拱形架的两侧内壁均固定连接有传动杆二,并将传动杆一通过气管与传动杆二连通,在传动杆一和传动杆二的传动端均固定内部转动连接有夹持轮的匚型架,将与传动杆一传动连接的匚型架侧壁固定有步进电机,步进电机与邻近位置夹持轮传动连接,通过设置气动传动的传动杆一和传动杆二对夹持轮进行驱动,整体结构简单,简单实用,能够有效提高主机体与线缆夹持的牢固性;
22.3、将配重箱的顶面开设有一个插接孔二和两个插接孔一,将配重箱的内部对应插接孔一所在位置处固定有电机轴传动连接有卷绳轮的收卷电机,将牵引绳的贯穿配重箱的顶面与对应位置处的动力电机底部连接,插接孔二与圆管之间连接有弹簧管,通过设置弹簧管能够将供电和数据传输的线缆置于其中,在不受外力时,能够自动弯曲收纳,在受外力时,能够提供足够的长度,然后在配重箱的底部中心位置处开设有探出孔,探出孔内设置有用于图像采集的半球摄录单元,通过设置可伸缩释放的配重箱结构,有利于降低图像采集器的重心,从而保证设备及采集画面的稳定性。
附图说明
23.下面结合附图对本发明作进一步的说明。
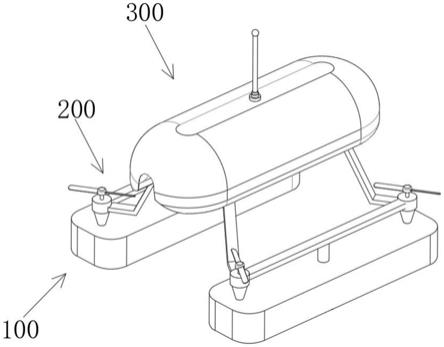
24.图1是本发明物联网图像采集器的结构示意图;
25.图2是本发明中物联网图像采集器的另一状态结构示意图;
26.图3是本发明中主机体的结构示意图;
27.图4是本发明中夹持传动单元的结构示意图;
28.图5是本发明中传动杆一的结构示意图;
29.图6是本发明中飞行支架模块的结构示意图;
30.图7是本发明中配重摄录模块的结构示意图;
31.图8是本发明中半球摄录单元的结构示意图。
32.图中:100、配重摄录模块;110、配重箱;111、插接孔一;112、插接孔二;113、探出孔;120、收卷电机;121、卷绳轮;130、半球摄录单元;131、半球摄像头;132、连接座;133、复位弹簧;134、上连座;135、支撑柱;136、支撑底板;200、飞行支架模块;210、横杆;220、桨叶;230、折架;240、动力电机;250、圆管;300、主机体;310、倒置y型槽;320、夹持传动单元;321、拱形架;322、传动杆一;3221、圆杆;3222、活塞;3223、功能弹簧;3224、外套管;3225、气嘴;323、传动杆二;324、匚型架;325、夹持轮;326、步进电机;327、气管;330、传输天线。
具体实施方式
33.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都
属于本发明保护的范围。
34.请参阅图1
‑
8所示,一种物联网图像采集器,包括主机体300,主机体300的底面开设有倒置y型槽310,主机体300的内部对应倒置y型槽310的顶端位置处等距设置有多个用于夹持线缆的夹持传动单元320,通过设置夹持传动单元320能够对线缆进行夹持,并使得主机体300能够沿着线缆移动;
35.主机体300的底面两侧均固定连接有飞行支架模块200,飞行支架模块200的底部均悬挂连接有配重摄录模块100,通过将飞行支架模块200和配重摄录模块100,使得图像采集器的重心下移,从而能够提高主机体300在线缆上移动的稳定性。
36.飞行支架模块200包括两个与主机体300底部侧壁外部固定连接的折架230,折架230的底端固定连接有动力电机240,两个动力电机240之间固定连接有横杆210,横杆210的底面中心位置处固定连接有圆管250,动力电机240的电机轴传动连接有桨叶220,通过设置位于主机体300下部位置的飞行支架模块200能够将重心下移,从而提高图像采集器的稳定性,夹持传动单元320包括与主机体300内顶面固定连接的拱形架321,拱形架321的中部内顶面固定有传动杆一322,拱形架321的两侧内壁均固定连接有传动杆二323,传动杆一322通过气管327与传动杆二323连通,传动杆一322和传动杆二323的传动端均固定连接有匚型架324,匚型架324的内部转动连接有夹持轮325,其中,与传动杆一322传动连接的匚型架324侧壁固定有步进电机326,步进电机326与邻近位置夹持轮325传动连接,通过设置气动传动的传动杆一322和传动杆二323对夹持轮325进行驱动,整体结构简单,简单实用,能够有效提高主机体300与线缆夹持的牢固性。
37.传动杆一322和传动杆二323的结构相同,传动杆一322包括外套管3224,外套管3224的内部滑动连接有活塞3222,活塞3222的底部固定有圆杆3221,圆杆3221的外壁开设有条形槽,外套管3224的端部固定有与条形槽滑动的凸块,这样能够限制外套管3224与圆杆3221发生相对旋转,外套管3224的顶端固定有连接气管327的气嘴3225,外套管3224与活塞3222之间设置有功能弹簧3223;
38.传动杆一322的功能弹簧3223为支撑弹簧,通过设置支撑弹簧在不受外力时,能够驱动竖直方向的夹持轮325向下移动,传动杆二323的功能弹簧3223为拉伸弹簧,通过设置拉伸弹簧能够在竖直方向的夹持轮325向下移动时,带动水平方向的夹持轮325做背离线缆的运动。
39.夹持轮325的夹持面向内凹陷,夹持轮325的材质为橡胶,且夹持轮325的夹持面开设有防滑条纹,这样能够提高夹持轮325与线缆夹持的紧密型,配重摄录模块100包括配重箱110,配重箱110的顶面中心位置处开设有插接孔二112,配重箱110的顶面两侧对应动力电机240所在位置处开设有插接孔一111,配重箱110的内部对应插接孔一111所在位置处固定有收卷电机120,收卷电机120的电机轴传动连接有卷绳轮121,卷绳轮121的外壁缠绕固定有牵引绳的一端,牵引绳的贯穿配重箱110的顶面与对应位置处的动力电机240底部连接,插接孔二112与圆管250之间连接有弹簧管,通过设置弹簧管能够将供电和数据传输的线缆置于其中,在不受外力时,能够自动弯曲收纳,在受外力时,能够提供足够的长度;
40.配重箱110的底部中心位置处开设有探出孔113,探出孔113内设置有用于图像采集的半球摄录单元130。
41.半球摄录单元130包括与配重箱110内底滑动连接的两个支撑柱135,支撑柱135的
底部固定连接有支撑底板136,两个支撑柱135的顶部之间固定连接有上连座134,上连座134的底部固定连接有半球摄像头131,上连座134的顶面中心固定有连接座132,连接座132的内部固定有与配重箱110内顶连接的复位弹簧133,通过设置支撑柱125连接半球摄像头131的结构,在配重箱110与地面接触时,能够将半球摄像头131置于其内部,避免半球摄像头131出现磨损,两个配重箱110相对的侧壁内部均嵌入固定有永磁铁,且两个永磁铁的磁性相反,这样两个配重箱110可进行吸附,这样构成对线缆环抱的结构,这样在供电不足的情况下,也能将图像采集器固定在线缆上,方便后期援救。
42.配重箱110的内部嵌入固定有锂电池,通过将锂电池放置在配重箱110内部,能够提高图像采集器的稳定性和续航能力,主机体300的顶面固定连接有传输天线330。
43.工作原理:使用时,在配重箱110内放置一定数量的锂电池,为图像采集器提供视频监控和飞行的电量,进行图像采集时,操作人员控制收卷电机120对牵引绳进行收卷,从而将配重摄录模块100与飞行支架模块200紧密贴靠,然后控制动力电机240带动桨叶220旋转,产生向下的推力,从而将图像采集器起飞;
44.图像采集器起飞后,配重摄录模块100内的半球摄录单元130,在自身重量和复位弹簧133的弹性作用下,将半球摄像头131弹出配重箱110的底部,底面操作人员可通过半球摄像头131对指定区域进行图像采集;
45.在图像采集的同时,寻找处于较佳观测位置的线缆,操控图像采集器飞行至线缆的上部,将图像采集器的倒置y型槽310与线缆的走向对齐,然后缓慢降低图像采集器的高度,直至夹持传动单元320处于竖直状态的夹持轮325与线缆接触,随着竖直状态的夹持轮325与线缆之间作用力的增大,从而将传动杆一322内部气体通过气管327挤压至传动杆二323内,从而驱动水平位置的夹持轮325对线缆进行夹持,之后,操作人员可控制收卷电机120释放牵引绳,从而降低配重箱110的高度,然后控制动力电机240驱动主机体300及其下部的配重箱110摇摆,从而将通过永磁铁将两个配重箱110吸附在一起,在进行巡视时,可通过步进电机326带动夹持轮325旋转,实现图像采集器沿着线缆移动,从而对不同位置的图像进行采集;
46.图像采集结束后,控制制收卷电机120对牵引绳进行收卷,在牵引绳的牵引作用下,两个配重箱110的永磁铁分离,从而将配重摄录模块100与飞行支架模块200紧密贴靠,然后控制动力电机240带动桨叶220旋转,产生向下的推力,从而将图像采集器起飞,由于竖直状态的夹持轮325与线缆之间作用力的减小,在功能弹簧3223的弹性作用下,带动竖向夹持轮325向下移动,水平位置的夹持轮325回撤,然后控制图像采集器回到指定位置,在下落过程中,支撑底板136先与地面接触,从而将半球摄像头131压入配重箱110内。
47.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
48.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。