1.本发明属于深度学习技术领域,具体涉及一种猪只估重方法。
背景技术:
2.随着经济发展,人们对猪肉的需求越来越高,猪肉的产量也越来越高,目前采用最多的养殖模式是大栏养猪,实现了养猪行业由散养模式向规模化、集约化模式的转变,这种养殖模式的特点是猪只密度大,数量多,其优点为节约占地,增加单位饲养头数,适合集约化养殖,便于统计,母猪生活在大栏里一目了然,统计挂牌,不容易出错。
3.传统技术中采用人工的方式对猪只进行称重,这种方式的人力成本投入高,工作人员的工作量大,并且效率低下;随着现代化设备在养殖业的普及,深度学习技术在猪只称重的应用越来越广泛,但是现有的猪只称重技术只能对平面图像进行计算,而对于鱼眼图像的猪只称重存在较大的误差,准确度低。
技术实现要素:
4.为了解决现有技术存在的人力成本投入高、工作量大、效率低下以及准确度低的问题,本发明目的在于提供一种成本投入低、工作量少、效率高以及准确度高的猪只估重方法。
5.本发明所采用的技术方案为:
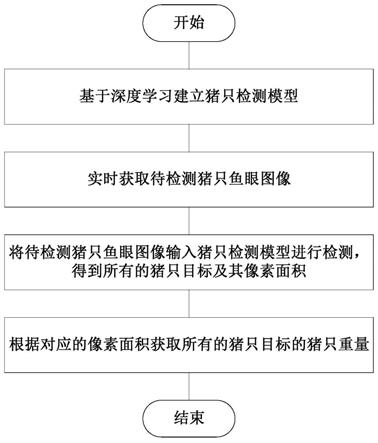
6.一种猪只估重方法,包括如下步骤:
7.基于深度学习建立猪只检测模型;
8.实时获取待检测猪只鱼眼图像;
9.将待检测猪只鱼眼图像输入猪只检测模型进行检测,得到所有的猪只目标及其像素面积;
10.根据对应的像素面积获取所有的猪只目标的猪只重量。
11.进一步地,基于深度学习建立猪只检测模型,包括如下步骤:
12.获取猪只鱼眼图像数据集,并对猪只鱼眼图像数据集中的所有图像进行预处理,得到预处理后的猪只鱼眼图像数据集;
13.基于深度学习建立mask
‑
rcnn模型;
14.使用预处理后的猪只鱼眼图像数据集对mask
‑
rcnn模型进行训练,得到猪只检测模型。
15.进一步地,预处理包括几何变换处理、光学变换处理、增加噪声处理以及归一化处理。
16.进一步地,mask
‑
rcnn模型的网络结构包括resnext模块、rpn模块、roi align模块、fast r
‑
cnn模块以及fcn模块。
17.进一步地,mask
‑
rcnn模型的工作方法,包括如下步骤:
18.将猪只鱼眼图像输入resnext模块,得到特征图;
19.根据特征图获取若干roi候选框;
20.将若干roi候选框输入rpn模块进行筛选,使用二值分类方法与边框回归方法得到筛选后的roi候选框;
21.将筛选后的roi候选框输入roi align模块进行特征图对应处理,即将输入的猪只鱼眼图像与特征图的像素进行对应,将特征图于固定特征进行对应;
22.将筛选后的roi候选框输入fcn模块进行依次的分类、边框回归以及mask分割,得到每个筛选后的roi候选框的mask。
23.进一步地,使用预处理后的猪只鱼眼图像数据集对mask
‑
rcnn模型进行训练,得到猪只检测模型,包括如下步骤:
24.将预处理后的猪只鱼眼图像数据集划分为猪只鱼眼图像训练集和猪只鱼眼图像测试集;
25.将猪只鱼眼图像训练集输入mask
‑
rcnn模型进行训练,得到初始的猪只检测模型;
26.将猪只鱼眼图像测试集输入初始的猪只检测模型进行优化,得到最优的猪只检测模型。
27.进一步地,将待检测猪只鱼眼图像输入猪只检测模型进行检测,得到所有的猪只目标及其像素面积,包括如下步骤:
28.将待检测猪只鱼眼图像进行网格划分,得到含有网格的猪只鱼眼图像;
29.获取每个网格的像素权重;
30.将当前的含有网格的待检测猪只鱼眼图像输入猪只检测模型进目标检测,得到待检测猪只鱼眼图像内的所有猪只目标及其位置;
31.获取当前的猪只目标在对应位置的网格的像素面积;
32.遍历待检测猪只鱼眼图像的所有猪只目标,得到所有的猪只目标在对应位置的网格的像素面积。
33.进一步地,根据对应的像素面积获取所有的猪只目标的猪只重量,包括如下步骤:
34.根据当前的猪只目标在对应位置的网格的像素面积和对应网格的像素权重获取当前的猪只目标的猪只重量;
35.遍历待检测猪只鱼眼图像的所有猪只目标,得到所有猪只目标的猪只重量。
36.进一步地,猪只重量的获取公式为:
[0037][0038]
式中,p为猪只重量;s
i
为猪只目标在第i个网格的像素面积;l
i
为第i个网格的像素权重;i为网格指示量;n为猪只目标所占的网格总数。
[0039]
进一步地,猪只估重方法基于猪只估重系统,猪只估重系统包括摄像单元和数据处理中心,摄像单元与数据处理中心通信连接;
[0040]
摄像单元,用于实时获取待检测猪只鱼眼图像,并将待检测猪只鱼眼图像发送至数据处理中心;
[0041]
数据处理中心,用于基于深度学习建立猪只检测模型,接收待检测猪只鱼眼图像,将待检测猪只鱼眼图像输入猪只检测模型进行检测,得到所有的猪只目标及其像素面积,
并根据对应的像素面积获取所有的猪只目标的猪只重量;
[0042]
摄像单元包括主控模块、摄像头以及通讯模块,主控模块分别与摄像头和通讯模块通信连接,通讯模块与数据处理中心通信连接;
[0043]
数据处理中心包括数据处理服务器、数据管理服务器以及数据存储服务器,数据管理服务器分别与通讯模块、数据处理服务器以及数据存储服务器通信连接。
[0044]
本发明的有益效果为:
[0045]
1)本发明提供一种基于深度学习的猪只估重方法,对拍摄的待检测猪只鱼眼图像进行检测,使用猪只检测模型方便的检测猪只目标的位置及其像素面积,获取每个猪只目标的猪只重量,避免了人工方式进行称重,减少了人力成本投入,提高了估重效率;
[0046]
2)本发明的针对鱼眼图像进行网格划分和像素权重划分,减小了对于鱼眼图像的猪只称重的误差,提高了准确度。
[0047]
本发明的其他有益效果将在具体实施方式中进一步进行说明。
附图说明
[0048]
图1是本发明中猪只估重方法流程框图。
[0049]
图2是mask
‑
rcnn模型的网络结构图。
[0050]
图3是待检测猪只鱼眼图像。
[0051]
图4是含有网格的待检测猪只鱼眼图像。
[0052]
图5是猪只估重系统框图。
具体实施方式
[0053]
下面结合附图及具体实施例对本发明做进一步阐释。
[0054]
实施例1:
[0055]
如图1所示,本实施例提供一种猪只估重方法,包括如下步骤:
[0056]
基于深度学习建立猪只检测模型,包括如下步骤:
[0057]
获取猪只鱼眼图像数据集,并对猪只鱼眼图像数据集中的所有图像进行预处理,得到预处理后的猪只鱼眼图像数据集;
[0058]
预处理包括几何变换处理、光学变换处理、增加噪声处理以及归一化处理;
[0059]
几何变换处理丰富物体在图像中出现的位置和尺度等,从而满足模型的平移不变性和尺度不变性,例如平移、翻转、缩放和裁剪等;光学变换处理增加不同光照和场景下的图像,典型的操作有亮度、对比度、色相与饱和度的随意扰动、通道色域之间的变换;增加噪声处理通过在原始图像中增加一定的扰动,如高斯噪声,可以使模型对可能遇到的噪声具有抗干扰性,从而提升模型的泛化能力;归一化处理图像处理完成后,需要对图像进行裁剪,让图像缩放到固定的尺寸;
[0060]
基于深度学习建立mask
‑
rcnn模型,如图2所示,mask
‑
rcnn模型的网络结构包括resnext模块、rpn模块、roi align模块、fast r
‑
cnn模块以及fcn模块;
[0061]
mask
‑
rcnn模型的工作方法,包括如下步骤:
[0062]
将猪只鱼眼图像输入resnext模块,得到特征图;
[0063]
根据特征图获取若干兴趣区域roi候选框;
[0064]
将若干roi候选框输入区域建议网络rpn模块进行筛选,使用二值分类方法与边框回归方法得到筛选后的roi候选框;
[0065]
将筛选后的roi候选框输入兴趣区域校正roi align模块进行特征图对应处理,即将输入的猪只鱼眼图像与特征图的像素进行对应,将特征图于固定特征进行对应;
[0066]
将筛选后的roi候选框输入全卷积网络fcn模块进行依次的分类、边框回归以及掩码mask分割,得到每个筛选后的roi候选框的mask;
[0067]
主要包括以下优点:
[0068]
1)高速和高准确率:mask r
‑
cnn模型选用了经典的目标检测算法faster r
‑
cnn和经典的语义分割fcn模块,二者结合,faster r
‑
cnn模型可以既快又准的完成目标检测的功能;fcn模块可以精准的完成语义分割的功能,这两个算法都是对应领域中的经典之作,mask r
‑
cnn比faster r
‑
cnn复杂,但是最终仍然可以达到5fps的速度,这和原始的faster r
‑
cnn模型的速度相当,由于发现了roi pooling中所存在的像素偏差问题,提出了对应的roialign策略,加上fcn精准的像素mask,使得其可以获得高准确率;
[0069]
roi align模块是在mask r
‑
cnn模型中提出的一种区域特征聚集方式,很好地解决了现有技术中roi pooling模块操作中两次量化造成的区域不匹配问题,用roi align模块替换roi pooling模块可以提升检测模型的准确性;
[0070]
roi align模块的思路很简单:取消量化操作,使用双线性内插的方法获得坐标为浮点数的像素点上的图像数值,从而将整个特征聚集过程转化为一个连续的操作,值得注意的是,在具体的算法操作上,roi align模块并不是简单地补充出候选区域边界上的坐标点,然后将这些坐标点进行池化,而是重新设计了一套流程:
[0071]
2)简单直观:整个mask r
‑
cnn模型的思路很简单,就是在原始faster r
‑
cnn模型的基础上面增加了fcn模型来产生对应的mask分支,mask r
‑
cnn模型通过faster r
‑
cnn模型扩展得到,在faster r
‑
cnn模型中,对于每个roi主要有两个输出,一个输出是分类结果,也就是预测框的标签;另一个输出是回归结果,也就是预测框的坐标offset;而mask r
‑
cnn模型则是添加了第三个输出:目标掩码object mask,也就说对每个roi都输出一个mask,该支路是通过fcn网络来实现的;以上这三个输出支路相互之间都是平行关系,相比其他先分割再分类的实例分割算法相比,这种平行设计不仅简单而且高效;
[0072]
3)易于使用:整个mask r
‑
cnn模型非常的灵活,可以用来完成多种任务,包括目标分类、目标检测、语义分割、实例分割、人体姿态识别等多个任务,这将其易于使用的特点展现的淋漓尽致,有很好的扩展性和易用性,并且可以更换不同的主干架构和头部结构来获得不同性能的结果;
[0073]
遍历每一个候选区域,保持浮点数边界不做量化;
[0074]
将候选区域分割成若干个单元,每个单元的边界也不做量化;
[0075]
在每个单元中计算固定四个坐标位置,用双线性内插的方法计算出这四个位置的值,然后进行最大池化操作;
[0076]
使用预处理后的猪只鱼眼图像数据集对mask
‑
rcnn模型进行训练,得到猪只检测模型,包括如下步骤:
[0077]
将预处理后的猪只鱼眼图像数据集划分为猪只鱼眼图像训练集和猪只鱼眼图像测试集;
[0078]
将猪只鱼眼图像训练集输入mask
‑
rcnn模型进行训练,得到初始的猪只检测模型;
[0079]
将猪只鱼眼图像测试集输入初始的猪只检测模型进行优化,得到最优的猪只检测模型;
[0080]
实时获取如图3所示待检测猪只鱼眼图像,本实施例中,摄像头安装在栏位正中间的上方,并且对栏位全局无死角拍摄;
[0081]
将待检测猪只鱼眼图像输入猪只检测模型进行检测,得到所有的猪只目标及其像素面积,包括如下步骤:
[0082]
将待检测猪只鱼眼图像进行网格划分,从中间到边缘划分多个面积大小不同的网格,每个网格范围代表相同的猪只体重,得到含有网格的猪只鱼眼图像,减小了对于鱼眼图像的猪只称重的误差,提高了准确度;
[0083]
根据实际计算时的效率划分,网格越多效果越好,但是算法越慢,可以根据算法速度和复杂度要求划分;由于畸变是中间向四周渐变的,可以根据线性渐变规则,从中间向两边乘以固定系数衰减,得到对应的网格,远离中心的像素点权重越大,可知越靠近边缘,网格的面积越小;
[0084]
获取每个网格的像素权重,根据预知的数据,摄像头高度、猪只实际面积以及猪只实际重量,预先计算并标定出不同网格中像素权重;
[0085]
将如图4所示的当前的含有网格的待检测猪只鱼眼图像输入猪只检测模型进目标检测,得到待检测猪只鱼眼图像内的所有猪只目标及其位置;
[0086]
获取当前的猪只目标在对应位置的网格的像素面积;
[0087]
遍历待检测猪只鱼眼图像的所有猪只目标,得到所有的猪只目标在对应位置的网格的像素面积;
[0088]
根据对应的像素面积获取所有的猪只目标的猪只重量,包括如下步骤:
[0089]
根据当前的猪只目标在对应位置的网格的像素面积和对应网格的像素权重获取当前的猪只目标的猪只重量;
[0090]
遍历待检测猪只鱼眼图像的所有猪只目标,得到所有猪只目标的猪只重量;猪只重量的获取公式为:
[0091][0092]
式中,p为猪只重量;s
i
为猪只目标在第i个网格的像素面积;l
i
为第i个网格的像素权重;i为网格指示量;n为猪只目标所占的网格总数。
[0093]
本发明提供一种基于深度学习的猪只估重方法,对拍摄的待检测猪只鱼眼图像进行检测,使用猪只检测模型方便的检测猪只目标的位置及其像素面积,获取每个猪只目标的猪只重量,避免了人工方式进行称重,减少了人力成本投入,提高了估重效率。
[0094]
实施例2:
[0095]
如图5所示,本实施例在实施例1的基础上,提供一种猪只估重系统,应用于实施例1中的猪只估重方法,猪只估重系统包括摄像单元和数据处理中心,摄像单元与数据处理中心通信连接;
[0096]
摄像单元,用于实时获取待检测猪只鱼眼图像,并将待检测猪只鱼眼图像发送至
数据处理中心;
[0097]
数据处理中心,用于基于深度学习建立猪只检测模型,接收待检测猪只鱼眼图像,将待检测猪只鱼眼图像输入猪只检测模型进行检测,得到所有的猪只目标及其像素面积,并根据对应的像素面积获取所有的猪只目标的猪只重量;
[0098]
摄像单元包括主控模块、摄像头以及通讯模块,主控模块分别与摄像头和通讯模块通信连接,通讯模块与数据处理中心通信连接;
[0099]
数据处理中心包括数据处理服务器、数据管理服务器以及数据存储服务器,数据管理服务器分别与通讯模块、数据处理服务器以及数据存储服务器通信连接。
[0100]
本发明不局限于上述可选的实施方式,任何人在本发明的启示下都可得出其他各种形式的产品。上述具体实施方式不应理解成对本发明的保护范围的限制,本发明的保护范围应当以权利要求书中界定的为准,并且说明书可以用于解释权利要求书。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。